(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПОСТОЯННОГО ТОКА
| название | год | авторы | номер документа |
|---|---|---|---|
| СТАБИЛИЗАТОР НАПРЯЖЕННОСТИ МАГНИТНОГО ПОЛЯ | 1965 |
|
SU170120A1 |
| Источник стабильного магнитного поля | 1990 |
|
SU1721599A1 |
| СПОСОБ ЯМР КАРОТАЖА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2230345C1 |
| Способ ядерного магнитного каротажа и устройство для его реализации | 2016 |
|
RU2645909C1 |
| ЦИФРОВОЙ АМПЕРМЕТР ПОСТОЯННОГО ТОКА | 1971 |
|
SU290224A1 |
| Измеритель постоянного тока | 1979 |
|
SU849086A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СОСТАВА И РАСХОДА МНОГОКОМПОНЕНТНОЙ ЖИДКОСТИ НА ОСНОВЕ ЯДЕРНОГО МАГНИТНОГО РЕЗОНАНСА (ВАРИАНТЫ) | 2004 |
|
RU2256931C1 |
| УСТРОЙСТВО НЕИНВАЗИВНОГО ОПРЕДЕЛЕНИЯ СОДЕРЖАНИЯ САХАРА В КРОВИ ЧЕЛОВЕКА | 2003 |
|
RU2271741C2 |
| Устройство для управления полем электромагнита | 1975 |
|
SU553606A1 |
| СПЕКТРСЛ1ЕТР .АКУСТИЧЕСКОГО ЯДЕРНОГО Л1\ГНИТНОГО | 1973 |
|
SU381018A1 |
1
Изобретение относится к области приборостроения и может быть использовано в качестве прецизионного измерителя постоянного тока.
Известны устройства ЯМР (ядерно-маг- нитный резонанс) для измерения постоянного тока, в которых узел ЯМР состоит из магнита с катушкой коррекции, в зазоре которого расположены датчики, окорный генератор, соединенный с фазовым детектором и смесителем, а также фильтр с регулятором тока. Девиация частоты на выходе смесителя служит цифровым аналогом измеряемого тока.
Недостатком известных устройств является сравнительно низкая точность измерений.
Целью изобретения является повышение точности измерений. Предложенное устройство снабжено спин-генератором, включенным между одним из датчиков и смесителем, устройством ядернО-магнитного резонанса, включенным между другим датчиком и фазовым детектором, а также пластиной из магнитомягкого материала, расположенной
между датчиками. При этом в качестве первого из них использован измерительный датчик ЯМР, а в качестве второго - опорный датчик этого же резонанса.
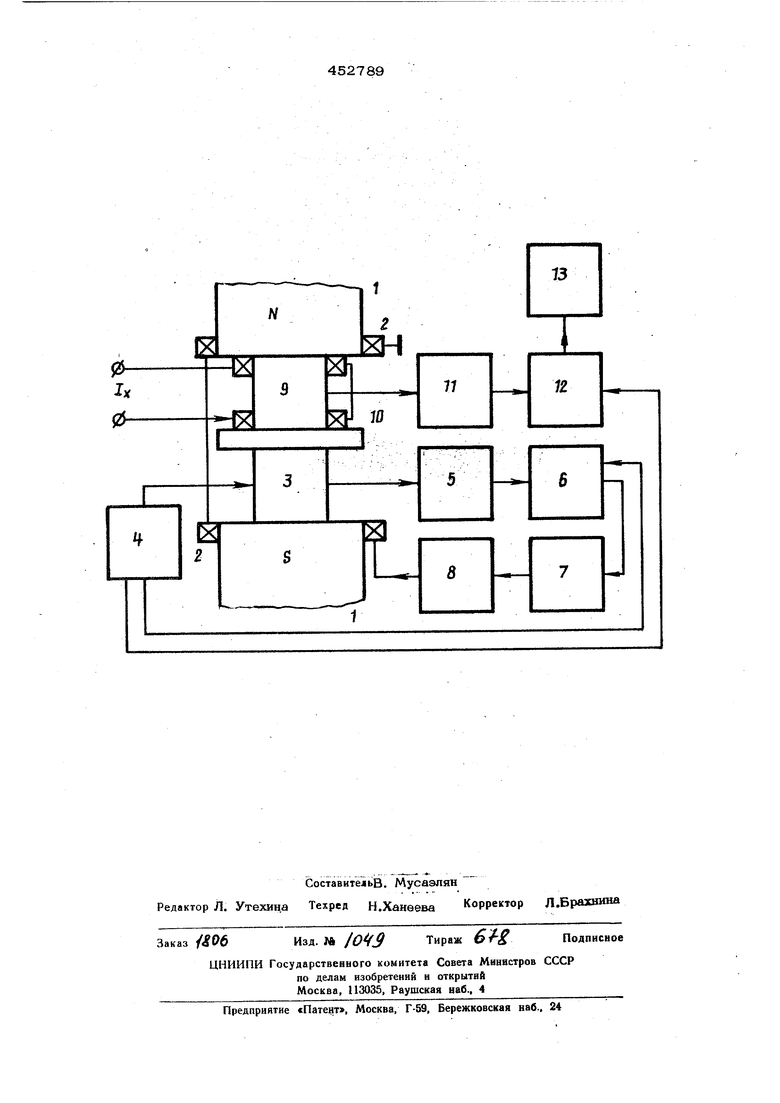
На чертеже изображено устройство, состоящее из магнита 1 с двумя зазорами, в которых размещены катушки 2 коррекции индукции магнитного поля. В одном из зазоров помещен опорный датчик ЯМР 3, соединенный с опорным генератором 4 и yciройством регистрации сигнала ЯМР 5. Сигнал устройства 5 сравнивается по фазе с напряжением опорного генератора 4 в фазовом детекторе 6, выходной сигнал которого через фильтр 7 управляет регулятором тока 8, соединенным с катушками 2. В другом зазоре помещена измерительная катушка 10 преобразователя ток-индукция, внутри которой находится датчик 9, аналогичный датчику 3 спин-генератора 11. Выход спин-генератора соединен с одним из входов смесителя 12, другой вход которого соединен с выходом опорного генератора 4,
Устройство работает следующим образом. Генератор 4, опорный датчик 3, устройство 5, фазовый детектор 6, фильтр 7, регулятор тока 8 и катушки 2 образуют спин-стабилизатор индукции магнитного поля магнита 1 в обоих зазорах. IlocTosracTво величины рабочих зазоров задается с помощью температурно стабильных призм, например, из кварца, керамики, и. жесткой конструкцией магнита 1 и катушек 2. При идентичности материала опорных призм Б зазорах в материала полюсных наконечни- ,ков изменетше температуры приводит, к иде TH4HO v5y изменению величины зазоров, изме нение индукции в которых компенсируется спин-стабилизатором. Так же происходит компенсация изменения индукций магнитно го поля в зазорах при изменении коэрцитив ной силы магнита при магнитной помехе. Спин-генератор 11 генерирует частоту, определяеь.гую индукцией магнитного поля в объеме датчика 9. В общем случае индукция в обоих зазорах равная, поэтому генератор 4 синтезирует две частоты, определяемые частотой Лармора для датчиков 3 и 9. Одна из частот служит опорной частотой для спин-стабилизатора, вторая поступает на смеситель 12, совместно с частотой спин-генератора 11. Вотсутствие гока У частоты спин-генератора 11 и Л, I опорного генератора 4 подбираются равными, и начальные показания частотомера 13 отражают лишь нестабильность нуля, определяемую дисперсией частот спин-генератора 11 и опорного генератора 4, Магнитный поток катушек 10 распределяется равномерно по сечению полюсных наконечников; выполненных из магнитомягкогаматериала. Девиация индукции в датчи (Ке 9 превышает девиацию индукции датчика is . раз, (где Sno -нлощадь полюсных наконечников, Sf70. площадь катушек 10 преобразователя ток-индукция), Спин стабил5|затор полностью компенсирует jeBH- I ацию индукции в объеме датчика 3 и части но в объеме датчика 9, Остаточная девиаuHH индукции магнитного поля в объеме датчика 9 преобразуется спин-генератором 11 в частоту. Девиация частоты спин-генератора 11 фиксируется частотомером 13 как ,цифровой аналог измеряемого тока При неработающем спин-стабилизаторе девиация частоты спин-генератора 11 равна Л/ К - коэффициент преобразования тока в индукцию в катущках 10; 9 - гиромагнитное отношение. При работе спин-стабилизатора девиация частоты спин-генератора определяется как .приращение некоторой математической величины. Спин-стабилизатор создает условия ста бильной работы для измерительной части, Неводя к минимуму дрейф нуля и создавая нвариантность (К внешней магнитной помехе l и флюктуаодям поля магнита, что повышает точцость измерений,. Предмет изобретения Устройство для измерения постоянного тока, содержащее тороидальный магнит с катушкой коррекции, в зазоре которого рас положены датчики, опорный генератор, соединенный с фазовым детектором и смесителем, а также фильтр с регулятором тока, отличающеес я тем, что, с целью повышения точности измерений, оно снабжено спин-Г(энератором, включенным между одним из датчиков н смесителем, устройством ядерно-магнитного резонанса, включенным между другим датчиком и фазовым детектором, а также пластиной из магнитомягкого материала, расположенной, между датчиками; при этом в качестве первого на них исполь зован измерительный датчик ядерно-магнитного резонанса, а в качестве второго опорный датчик этого же резонанса.
