Изобретение относится к силоизмерительной технике и применяется в нефтяной и газовой промышленности.
Известные устройства для измерения крутящего момента содержат датчик активной мощности, сумматор и компенсатор сигнала, пропорционального мощности ХОЛОСТОГО хода электродвигателя. Однако они не позволяют измерять момент с учетом потерь мощности в токоподводе при его больщой длине.
Цель изобретения - уменьшение погрещности измерения от активных потерь в токоподводе и в электродвигателе.
Это достигается тем, что предлагаемое устройство снабжено корректирующей цепочкой, включающей последовательно соединенные квадратор, множительное звено, делитель и сумматор, а также второе множительное звено, подключенное параллельно первому множительному звену и делителю между квадратором и сумматором. Вход квадратора корректирующей цепочки подсоединен к токовому входу датчика активной мощности, а выход сумматора этой цепочки - к основному сумматору.
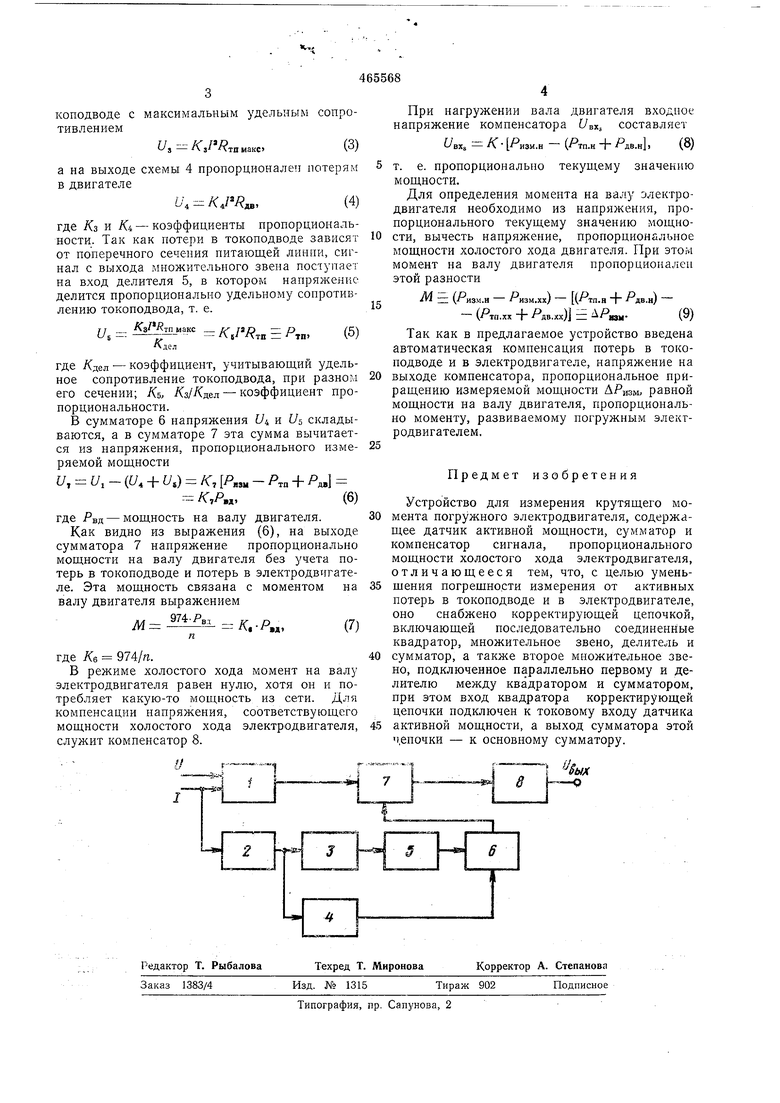
На чертеже показана блок-схема устройства.
Устройство содержит датчик I активной мощности, квадратор 2, множительные схемы 3 и 4, делитель 5, сумматоры 6 и 7 и компенсатор 8 напряжения, соответствующего мощности ХОЛОСТОГО хода электродвигателя.
Напряжение Ui на выходе датчика активной мощности, подключенного к цепи питания электродвигателя, пропорционально измеряемой мощности РПЗМ
f/, /С1- /-/СОЗ рЕЯизы,(1)
где и - фазовое напряжение; / - ток;
Cos ф -косинус угла между ними;
Kj - коэффициент пропорциональности. Сигнал, пропорциональный фазовому току, подается также на квадратор, напряжение на выходе которого U пропорционально квадрату входного сигнала
U,:K,,(2)
где Kz - коэффициент пропорциональности.
В множительных схемах 3 и 4 напряжение, снимаемое с выхода квадратора, умножается на величины, пропорциональные соответственно сопротивлению токоподвода погружного электродвигателя Ria и активному сопротивлению обмоток электродвигателя Лдв. Параметры схемы 3 выбирают с учетом изменения сопротивления токоподвода вследствие повышения температуры по глубине скважины. Таким образом, на выходе множительной
схемы 3 сигнал пропорционален потерям в токоподводе с максимальным удельным сонротивлением
3 Аа// тпиакс (3)
а на выходе схемы 4 пропорционален потерям в двигателе
(4)
где Кз и Ki -- коэффициенты пропорциональности. Так как потери в токоподводе зависят от поперечного сечения питающей линии, сигнал с выхода множительного звена поступает на вход делителя 5, в котором напряжение делится пропорционально удельному сопротивлению токоподвода, т. е.
г;ЛУЛтпмакс - if тяп - D(
СУ 5 - - - А (J ЛГтп : (.-J
где /(дел - коэффициент, учитывающий удельное сопротивление токоподвода, при разном его сечении; Къ, /Сз/Д дел - коэффициент пропорциональности.
В сумматоре 6 напряжения U и f/5 складываются, а в сумматоре 7 эта сумма вычитается из напряжения, пропорционального измеряемой мощности
и, и,- (U, + и,) /с, Рлз- - + Р,, - К,Р,,(6)
где РВД - мощность на валу двигателя.
Как видно из выражения (6), на выходе сумматора 7 нанряженне пропорционально мощности на валу двигателя без учета потерь в токоподводе и потерь в электродвигателе. Эта мощность связана с моментом на валу двигателя выражением
74.Рв /С,-Р,
(7)
вд
где /Се 974/п.
В режиме холостого хода момент на валу электродвигателя равен нулю, хотя он и потребляет какую-то мощность из сети. Для компенсации напряжения, соответствующего мощности холостого хода электродвигателя, служит компенсатор 8.
,/,
-аМ
При нагружении вала двигателя входное напряжение компенсатора С/вх составляет
f/B., к РИЗМ.Н - (РТП.Н + Ядв.„,(8)
т. е. пропорционально текущему значению мощности.
Для определения момента на валу электродвигателя необходимо из напряжения, пропорционального текущему значению мощности, вычесть напряжение, пропорциональное мощности холостого хода двигателя. При этом момент на валу двигателя пропорционален этой разности
М Е: (Я„зм.н - Яиэм.хх) - 1(Ртл.н + Лв.н) - (РТП.ХХ Г -Рдв.хх) п Гизм-()
Так как в предлагаемое устройство введена автоматическая компенсация потерь в токонодводе и в электродвигателе, напряжение на выходе компенсатора, пропорциональное приращению измеряемой мощности АРизль равной мощности на валу двигателя, пропорционально моменту, развиваемому погружным электродвигателем.
Предмет изобретения
Устройство для измерения крутящего момента погружного электродвигателя, содержащее датчик активной мощности, сумматор и компенсатор сигнала, пропорционального мощности холостого хода электродвигателя, отличающееся тем, что, с целью уменьшения погрешности измерения от активных потерь в токоподводе и в электродвигателе, оно снабжено корректирующей цепочкой, включающей последовательно соединенные квадратор, множительное звено, делитель и сумматор, а также второе множительное звено, подключенное параллельно первому и делителю между квадратором и сумматором, при этом вход квадратора корректирующей цепочки подключен к токовому входу датчика активной мощности, а выход сумматора этой ч.еночки - к основному сумматору.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения отработки долота | 1980 |
|
SU876971A1 |
| Устройство для измерения крутящего момента погружного электродвигателя | 1977 |
|
SU678352A2 |
| Устройство для измерения крутящего момента погружного электродвигателя | 1975 |
|
SU534658A2 |
| Устройство для измерения крутящего момента на роторе буровой установки | 1978 |
|
SU717573A1 |
| Устройство для измерения вращающего момента на валу электробура | 1980 |
|
SU924527A1 |
| Устройство для измерения крутящего момента на валу электродвигателя | 1991 |
|
SU1793281A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ПОДАЧИ УГОЛЬНЫХ КОМБАЙНОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2066757C1 |
| Устройство для определения нагрева асинхронного электродвигателя | 1991 |
|
SU1757009A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| Устройство для измерения вращающего момента асинхронного электродвигателя | 1977 |
|
SU750298A1 |
