Изобретение относится к динамометрам для измерения усилий, создаваемых разрывными машинами, предназначенными для испытания материалов на разрыв.
Предлагаемый динамометр отличается от известного тем, что конец одного плеча маятника снабжен роликом, которые свободно копится по поддерживаемому этим концом поворотно укрепленному стержню. В одной из точек последнего приложена измеряемая сила.
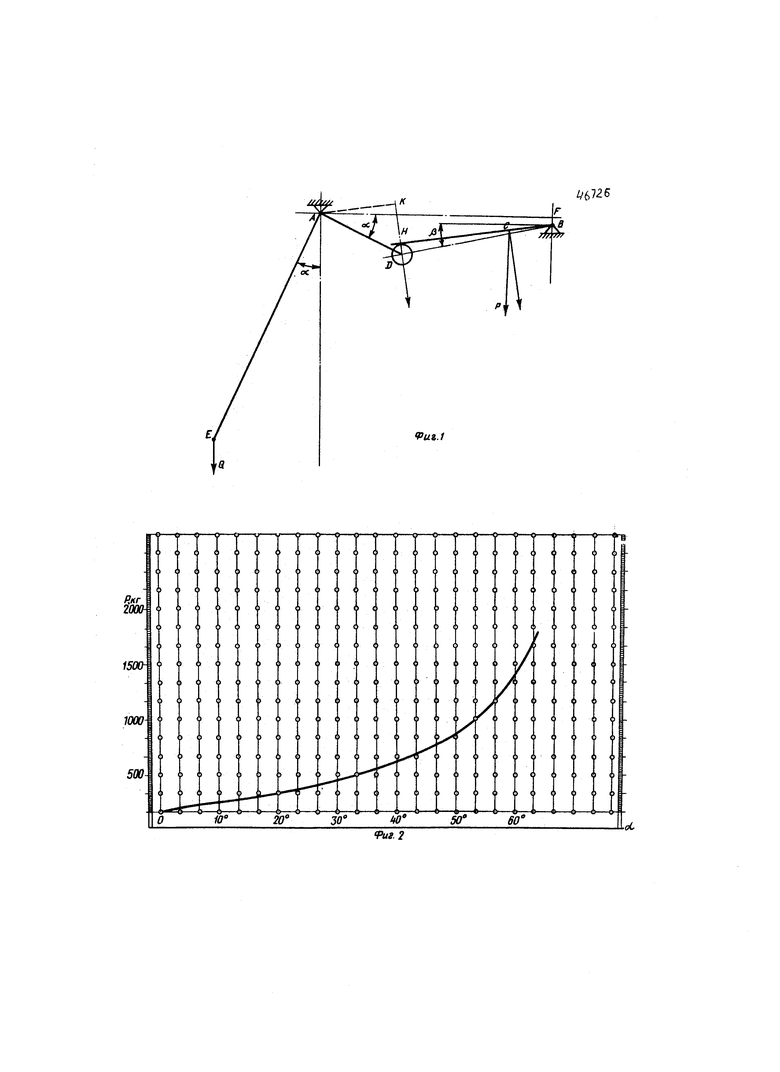
На фиг. 1 изображена схема предлагаемого динамометра; на фиг. 2 - градуировочная кривая для одного частного случая.
В неподвижной точке А шарнирно подвешен угловой рычаг ЕАД. Угол АЕД=90°. В точке Е длинного плеча АЕ маятника подвешен груз. На конце Д короткого плеча АД укреплен ролик, вращающийся без трения вокруг оси Д. По ролику без трения может катиться рычаг ВН, свободно лежащий на нем и шарнирно укрепленный в неподвижной точке В. К точке С рычага ВН приложено разрывающее образец (измеряемый) усилие Р. Под действием силы Р вся система занимает какое-то определенное положение, характеризующееся углом α между маятником AE и вертикалью. Между величиной силы Р и углом существует определенная зависимость.
Обозначим ВС=а, АЕ=b, АД=r, АГ=С, ВГ-h ВН=Z ВД=к и угол между ВД и горизонтальным направлением β.
Тогда по закону моментов имеет место следующая зависимость:

или 
Подученное уравнение легко изображается графически в координатах Р, α, если вычертить схему механизма в определенном масштабе для равных значений α, измерить непосредственно на чертеже соответственные значения  и вычислять соответственное значение Р.
и вычислять соответственное значение Р.
Как функция Р, α уравнение получается громоздким и неудобным для практического приложения. Поэтому при установлении вида указанной кривой лучше всего обратиться в графическому определению, применяя известную теорему Жуковского, относящуюся к равновесию плоских механизмов.
Меняя параметры r, L, С можно произвольно менять вид кривой Р, α.
На фиг. 2 дана кривая Р, α для изображенного на фиг. 1 механизма, полученная путем непосредственного замера угла α при разных нагрузках. Как видно, кривая имеет характер
P=kLg(α-C)+a,
близкий к параболическому закону.
Такой вид зависимости между Р и α выявляется основным преимуществом описываемого динадометра по сравнению с существующими рычажными и рычажно маятниковыми динамометрами, дающими зависимость вида Р=кα или Р к·sinα т.е. линейную или синусоидальную.
Динамометр разрывной машины должен регистрировать величину измеряемой силы с определенной степенью точности, выражаемой в процентах во отношению к величине нагрузки. По законам СССР величина нагрузки должна определяться с точностью до 1%, т.е. нагрузка в 100 кг должна определиться с точностью на 1 кг, нагрузка в 1000 кг - с точностью до 10 кг и т.д. Самым выгодным должен быть такой механизм, у которого отклонения маятника (стрелки указателя) при добавочной нагрузке, равной ΔР ≤ 0,01 Р, примерно одинаковы при всех значениях Р в пределах мощно эти машин.
Это условие выполняется предлагаемый динамометром. Например, в образце с длиной шкалы, равной 1000 мм, отклонение маятника равно 2,5 мм при Р=0,01 Р для всех значений Р от 40 до 2000 кг, т.е. практически возможна точность отсчета, превосходящая 1%, так как отклонение стрелки на 1 мм легко может быта отмечено. В известных линейных и синусоидальных механизмах происходит следующее. В линейных механизмах деления на шкале равномерны и цена делений на всей шкале одна и таже. При той же длине шкалы в 1000 мм и мощности в 2000 кг цена деления в 1 мм равна 2 кг, т.е. практически на протяжении всей шкалы возможна точность отсчета до 2 кг. Следовательно, нагрузки меньше 200 кг определяются с недостаточной степенью точности, нагрузки же больше 200 кг - с избыточной.
При синусоидальном механизме граница неточных отсчетов лежит еще выше. Для предотвращения этого неудобства применяются сменные грузы и шкалы. Однако, это не только удорожает машину, но и значительно усложняет работу с нею.
Предлагаемый динамометр свободен от указанных недостатков, прост в изготовлении и удобен при измерениях в той же мере, как и известные динамометры.
Маятниковый динамометр, отличающийся тем, что конец одного плеча маятника снабжен роликом, который свободно катится по поддерживаемому этим концом поворотно укрепленному в неподвижной точке стержню, в одной из точек которого приложена измеряемая сила.
