Изобретение относится к радиоизмерительной технике и может быть использовано в радио- и гидролокационных системах траекторных измерений где для определения параметров движения излучающих объектов в условиях ограниченной априорной информации о динамике их движения используется связь этих параметров с параметрами принимаемого сигнала - фазой, частотой и др.
Известно устройство для измерения частоты (периода) сигналов, содержащее последовательно соединенные счетчик чисел, соответствующих моментам нуль-пересечений, умножитель и сумматор, счетчик числа нуль-пересечений, вход которого соединен с первым входом счетчика чисел, соответствующих моментам нуль-пересечени генератор эталонных меток времени, соединенный выходом с вторым входом счетчика чисел, соответствующих моментам нуль-пересечений, блок вычитания, ячейку памяти и делитель,при этом выход счетчика числа нуль-пересечений и первый выход ячейки пг1мяти подсоединен к входам блока вычитания, выход которого соединен с вторым входом блока умножения, второй выход ячейки и выход сумматора подсоединен к входам делителя, поток нуль-пересечений исследуемого сигнала поступает на о.бъединенные входы счетчика чисел, соответствующих моментам нуль-пересечений и счетчик числа нуль-пересечений 1.
Однако, при несоответствии динамики движения излучающего объекта принятой модели, точность измерения ухудшается - появляется неизвестная систематическая ошибка, которая по величине может значительно превосходить уровень флюктуационной состаляющей ошибки измерения. Следователно, применение данного устройства в практике траекторных измерений ограничено, так как точность измерения периода сигнала, определяющего относительный доплеровский сдвиг, а следовательно и скорость движения объекта,-в значительной мере зависит от динаииики движения объекта.
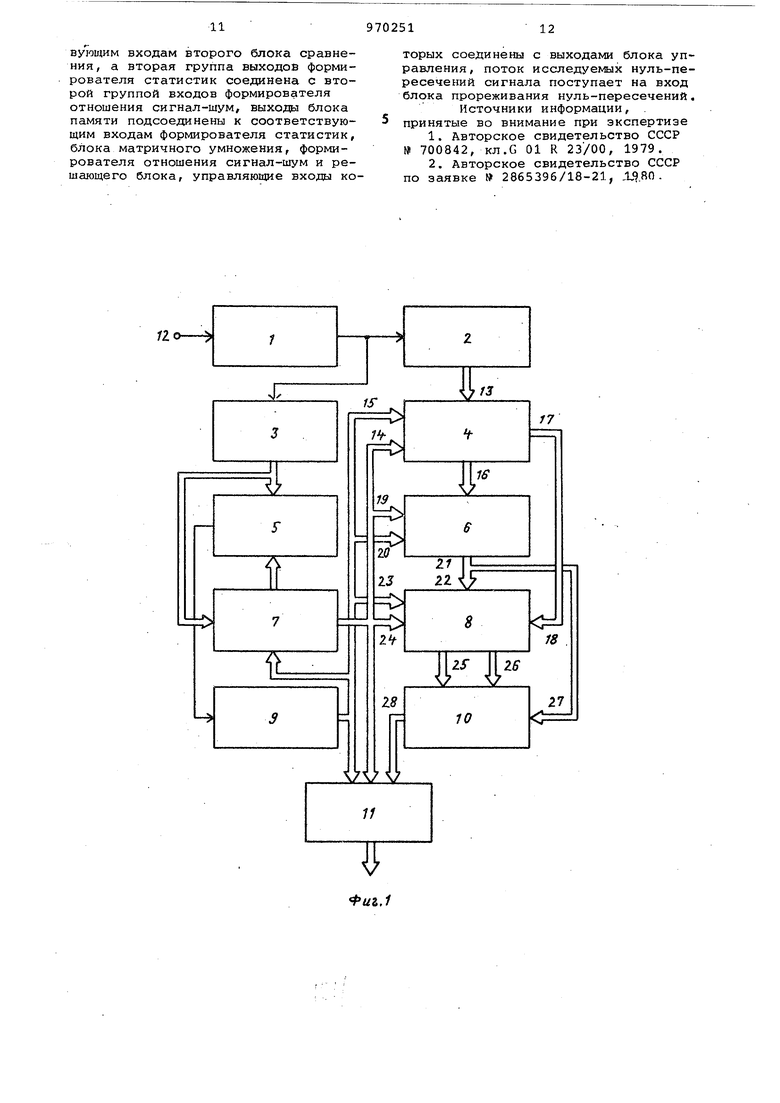
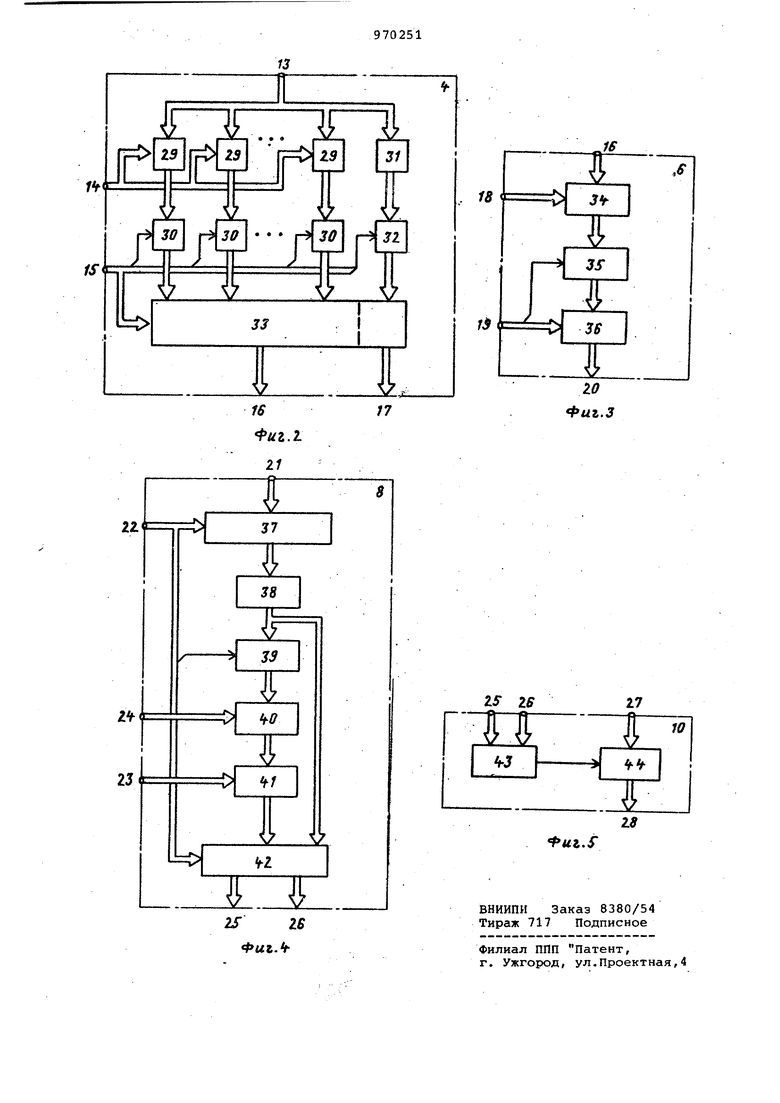
Известно также устройство для измерения периода сигналов и их производных, содержащее последовательно соединенные блок прореживания нульпересечений и формирователь чисел, соответствующих моментам нуль-пересечений, счетчик числа нуль-пересечений, вход которого соединен с выходом блока прореживания нуль-пересечений, решающий блок, накапливающий сумматор, блок сравнения, элемент ИЛИ, буферный регистр и ячейку памяти, при этом входы накапливающего сумматора подсоединены к выходам формирователя чисел, соответствующих моментам нуль-пересечений, выходы накапливающего сумматора подсоединены к входам буферного регистра,, выходы которого соединены с входами рашающего блока, выходы счетчика, числа .нуль-пересечений соединены с первой группой входов блока сравне-. НИН, к второй группе входов которого подсоединена первая группа выходов ячейки памяти, вторая группа выходов ячейки памяти соединена с соответствующими входами элемента . ИЛИ, выход которого подсоединен к управляющему входу буферного регистр поток нуль-пересечений поступает на вход блока прореживания нульпересечений. Это устройство обладает большими функциональными возможностями по сравнению с первым, так как позволя устранить смещения оценки периода . и начальной случайной, фазы сигналов обусловленные ускорениями объекта н .интервале наблюдения, и измерить производную периода 2. л Существеннным недостатком такого устройства является низкая точность в условиях ограниченной априорной информации о динамике, движения объе та по сравнению с точностью, когда степень полинома выбрана по методу наименьших квадратов из условия минимума суммарной ошибки (флюктуационной и динамической). Этот недоста ток может быть преодолен в адаптивном устройстве, которое по принятом сигналу в сложившейся помеховой обстановке, выбирает необходимую степень полинома. Цель изобретения - повышение точ ности измерений параметров сигнала, излучаемого движущимся объектом,при ограниченной априорной информации о j HaMHKe движения объекта. Поставленнс1я цель достигается те что в известное устройство, содержа щее последовательно соединенные бло прореживания нуль-пересечений и Формирователь чисел,соответствующих шоментам нуль-пересечений, счетчик числа нуль-пересечений, вход которо го соединен с выходом блока прорежи вания нуль-пересечений, первый блок сравнения, блок памяти, блок управления и решающий блок, причем выход счетчика числа нуль-пересечений под соединены к первой группе входов блока сравнения и к адресным входам блока памяти, вторая группа входов блока сравнения соединена с выходами блока памяти, а ее выход подсоединен к входу блока управления, дополнительно введены последовательно соединенные формирователь статистик (статистических сумм), блок матричного умножения, формирователь отношения сигнал-шум и второй блок сравнения, выходы которого подсоединены к входам решающего блока, входы формирователя статистик соединены с выходами формирователя чисел, соответствующих моментам нуль-пересечений, выходы блока матричного умножения также подсоединены к соответствующим входам второго блока сравнения а вторая группа выходов формирователя статистик соединена с второй группой входов формирователя отношения сигнал-шум, выходы блока памяти подсоединены к соответствующим входам формирователя статистик, блока матричного умножения, формирователя отношения сигнал-шум и решающего блока, управляющие входы которых соединены с выходами блока управле.ния, поток исследуемых нуль-пересечений фазового сигнала поступает на вход блока прореживания нульпересечений . На фиг.1 приведена структурная электрическая схема предлагаемого адаптивного измерителя параметров сигнала; на фиг.2-5 даны варианты выполнения с помощью элементов цифровой вычислительной техники- схем формирователя статистик блока матричного умножения, формирователя отношения сигнал-шум и блока сравнения соответственно. Измеритель содержит последовательно соединенные блок 1 прореживания нуль-пересечений и формирователь 2 чисел, соответствующих моментам нуль-пересечений, счетчик 3 числа нуль-пересечений, вход которого соединен с выходом блока 1 прореживания нуль-пересечений, формирователь 4 статистик, первый блок 5 сравнения, блок б матричного умножения, блок 7 памяти, формирователь 8 отношения сигнал-шум, блок 9 управления, блок 10 сравнения и решающий блок 11. Поток исследуемых нуль-пересечений сигнала поступает на вход 12 блока 1 прореживания нуль-пересечений, выходы счетчика 3 числа нуль-пересечеНИИ подсоединены к первой группе входов первого блока 5 сравнения и к адресным входам блока 7 памяти, вторая группа выходов первого блока 5 сравнения соединена с выходами блока 7 памяти, а ее выход подсоединен к входу блока 9 управления, выходы которого также подсоединены к управляющим входам блока 7 памяти и решающего блока 11, выходы фоомирователя 2 чиаел, соответствующих моментам нуль-пересечений, соединены с входа ми 13 формирователя 4 статистик, к вторым входам 14 которого подсоединены соответствующие выходы блока 7 памяти, а к управляющим входам 15 соответствующие выходы блока 9 упра ления, первая группа выходов 16 фор мирователя 4 статистик подсоединена к входам блока 6 матричного умножения, вторая группа выходов 17 форми рователя 4 статистик соединена с входами 18 формирователя 8 отношени сигнал-шум, вторая группа входов 19 блока б матричного умножения подсое динена к соответствующим выходам блока 7 памяти, управляющие входы 20 блока б матричного умножения сое динены с соответствующими выходами блока 9 управления, выходы 21 блока б матричного умножения соединены с входами 22 формирователя 8 отношеВИЯ сигнал-шум, управляющие входы 2 которого подсоединены к выходам бло ка 9 управления, а вторые входы 24 к соответствующим выходам блока 7 памяти, две группы выходов 25 и 26 формирователя 8 отношения сигналшум подсоединены к входам вторичног блока 10 сравнения, входы 27 которо го соединены с выходами 21 блока 6 матричного умножения, выходы 28 вто рого блока 10 сравнения подсоединены к входам решающего блока 11, к соответствующим входам которого также подсоединены выходы блока 7 памяти. Измеритель содержит множители 29,34 и 41 для двух чисел, квадраторы 31 и 38, накапливающие cyMtvia оры 30,32,35 и 39, оперативные запоминающие устройства 33,36 и 42, коммутатор 37; ячейку 40 вычитания, ячейку 43 сравнения двух чисел, многоразрядный ключ 44. Предлагаемый адаптивный измеритель параметров сигнала работает следующим образом. Принимаемая от движущегося иэлучающего объекта смесь сигнала с амплитудой Sp , частотой р и полной фазой (t} и шума n(t) имеет вид :ujt) Socos 2irft + f(t) + n(t), причем основную информационную нагрузку в сигнале несет полная фаза f(t) (t-tp)-J(t-to)i..., где u). - доплеровская частота, характеризующая радиальную скорость источника; - производная доплеровской частоты, пропорциональная ускорению наблюдаемого объекта; tg - начальный момент времени. Из принимаемой смеси сигнала и шума после узкополосной фильтрации формируется временная последовательность нуль-пересечений, которая является входным сигналом для адаптивного измерителя. Так как соседние по времени значения последовательности нуль-пересечений могут быть коррелированными, то в блоке 1 прореживания нуль-пересечений формируется поток статистически независимых нулей процесса делением входной импульсной последовательности в р раз. Отсчеты времени, соответствующие моментам выпадения некоррелированных нуль-пересечений, формируются в блоке 2. Дальнейшая обработка входного сигнала производится в предположении, что моменты нуль-пересечений аппроксимируются номиналом степени m Ч.ДЗ) afo,k o(, где j,- случайная нормешьная величина с нулевым средним и дисперсией (Гд .Коэффициенты полинома (3) непосредственно связаны с интересующими нас параметрами сигнала известными соотношениями. Частота сигнала С1к)-ПериодuTCtKbT,-Tj,2o(,j,-fe(K4-fMi --- (g; Производная частоты f (t) -iT(t,J/T (t) где Так)Н -Ьк-« + (2км;б(,2(.кч-Зк-(-7-, +-AU,,4-.-Фаза сигнала в заданный момент времени (оК-(-Ь) где t do В известных устройствах формирование оптимальной оценки значений коэффициентов oL / о , oi , . .. Л при выбранной степени полинома производится методом наименьших квадратов. Для получения наивысшей точности необходимо подбирать степень аппроксимирующего полинома, что связано с пределением коэффициентов поЛинома о ходу вычислений и значительным сложнением вычислителя и уменьшеним его алстродействия. Для упрощения технической реалиации лучше аппроксимировать вреенную последовательность нуль-переечений t,t2, ..., с помоью полиномов Чебышева (101 с условием ортогональности ч Ф- ( (k ) 5, tUN о -K/7U 1 J. Нетрудно определить связь между коэффициентами выражений (3) и (10) при условии (11) о-Тоо +То1 N « Л TltY Pm УУ,Гп,г,,( а, следовательно, и между коэффициентами ft/i полинома Чебышева и параметрами сигнала. Адаптация измерителя параметров сигнала к динамике движения объекта состоит в определе нии оптимального числа членов разложения (9) с использованием метода наименьших квадратов U.M-.- jtK|,%U)p 03 Значения fb , минимизирующие условие (14), определяются вырах ением, которое с учетом (10) имеет вид лмл. Р оТоо 1-Ьк . л (Ъ --Г10 К Т1.2:К-1 k-r o|t;-..Tn,. С14 Основной операцией над числами, соответствующир моментам выпадения некоррелированных нуль-пересечений, которые формируются в блоке 2, явля ется процедура форглирования достато N 1 N f N 1 г ных статистик Tt.; , т кгк , ... Т К -t -N -N-N полученные статистики в соответствии с (14) в блоке матричного умножения умножаются на коэффициенты . Для составления правила адаптаци используют суммарную ошибку при аппроксимации полиномами Чебьпиева вре менной последовательности нуль-пере гсечений 7(4 «г 1 О. А) TttK-.. %1к) ..(5o. где Ор - дисперсия флюктуации нуль пересечений ; М - действительная степень полинома, описывакмцего ин формационную последовател ность tg ,t,, . . .,t . Очевидно, что при увеличении числа членов разложения динамическая ошиб ка уменьшается каждый раз на р Однако одновременно возрастает флюк туационная ошибка на Go Введем следующее правило учета в разложении (12) коэффициентов . Если выполняется условие (10), то слагаемое ) в разложении учитывается. В противном случае слагаемое отбрасывается. Введенный критерий качества полиноминальной аппроксимации предполагает реализацию ВТОРОЙ основной процедуры - формирование отношения сигнал-шум,пропор.ционального дисперсии флюктуации нуль-пересечений Go и сравнения коэффициентов разложения полиномов Чебышева с порогом, равным G . Целесообразно формировать отношение сигналшум по результатам измерений обрабатываемой выборки нуль-пересечений. Для этого необходимо реализовать процедуру определения 5о в соответствии с правилом e o42NM-..)- |i;-lfi -.(i7) и использовать полученное значение дисперсии в качестве значения порога для определения истинной динамической модели движения наблюдаемого объекта. Ввиду того, что используются не истинные значения коэффициентов ()-, а их оценки (- , порог во втором блоке сравнения устанавливается из условия ( fi« г.12 гдеУр(1) - квантиль Х распределения с одной степенью свободы при заданной вероятности р. Таким образом, числа , соответствующие моментам выпадания нульпересечений, сформированные в блоке 2, поступают в формирователь 3 статистик на объединенные входы т+1 умножителей 29 и квадратора 31. Одновременно с этим числа из счетчика числа нуль-пересечений 3 поступают на адресные входы блока 7 памяти,из которого вызываются числа 1, k , k , . . . , подаются на соответствующие Ъторые входы умножителей 29. В результате на выходе первого умножителя формируется числовая последовательность , f 2. tuN+t 3 на выходе m+1-ro умножителя 29 формируется последовательность t, 2 , З t, , . . . , . На выходе квадратора 31 по мере поступления чисел t к форгдаруется последовательность Kt Л-Х АО. f-9 t/1 to. t,, , . . , tK . . . Полученные последовательности подаются на вхо- ды соответствующих накапливающих сумматоров 30 и 32, работа которых тактируется блоком 9 управления. К концу выборки из (ZN + I) нуль-пересечений на выходах m+l сумматоров 30 накапливаются статистики .и N А ы ft Itc-tn,..., К -t.a на выходе .накапливающего сумматора 32 - статистика В конце выборки на выходе первого блока сравнения появляется импулвс, задающий длительность интервала наблюдения. Указанный импульс поступает на вход блока 9 управления и вырабатывает команду на запрещение поступления чисел, соответствующих моментам нуль-пересечений, в блок формирования статистик и команду на запись -подкаченных статистик в оперативное запоминающее устройство 33 в блоке 4 формй ровани статистик. Затем по команде блока 9 управления из блока 7 памяти элемен ты матрицы последовательно пост пают в блок 6 матричного умножения, где в соответствии с выражением (17 умножаются на вызванные из оператив ного запоминающего устройства 33 Ht-wf элементы вектора статистик , ХК -t. -т полученные IB накапливающем сумматоре 35 в соответствии с (14) суммы пред ставляют собой элементы вектора оценок полиномов Чебышева р , которые по команде блока 9 управления.пере.писываются в оперативное запоминающее устройство 36. Далее по команде блока управления указанные коэффициенты , из оперативного запоминеи щего устройства 36 блока 6 матрично го умножения последовательно поступают в формирователь 8 отношения сигнал-шум, где через коммутатор 37 поочередно подаются на квадратор 38 на выходе которого последовательно формируются-квадраты оценок коэффици ентов разложения и переписываются в оперативное запоминающее устрой ство 42. По К(манде блока управления данные числа f также суммируются в накапливающем сумматоре 39, с выход w которого число 2 PJ- подается на первые входы блока 49 вычитания, а на вторые входы его вызывается число N .,Zt. с выходов 17 оперативного запоминающего устройства 33 формирователя 4 статистик. На выходе блока 40 вычитания формируется разность т-ш Разность умножается в блоке 41 умножения на число (2N+1-т) х Р (1) поступающее из блока 7 памяти, и переписывается в оперативное запоминающее устройство 42. С выхода 25 формирователя 8 отношения сигнал-шум число (p(f) подается на первые входы второго блока 10 сравнения в качестве опорной величины, с которой в нем сравниваются оценки коэффициентов разложения , поступающие на вторую группу входов второго блока сравнения с выходов 26 формирователя 8 отношения сигнал-шум. При выполнении неравенства (18) второй блок сравнения чисел вырабатывает управляющий единичный потенциал, открывающий многоразрядный ключ 44, который пропускает числа р,- На входы решающего блока 11. Если неравенство не выполняется, второй блок сравнения чисел вырабатывает нулевой управляющий потенциал, запирающий многоразрядный ключ 44, запрещая прохождение числа в решающий блок 11. Таким образом, путем сравнения во втором блоке 10 сравнения флюктуационной и динамической составляющих ошибки измерения принимается решение о характере динамики движения наблюдаемого объекта и о степени полинома разложения. В решающем блоке 11 в соответствии с правилом (12) осуществляется переход от коэффициентов разложения по полиномам Чебышева и коэффициентам разложения алгебраического аппроксимирующего полинома (5), для чего по команде блока управления подаются числа, соответствующие элементам преобразующей матрицы (12), на выходе решающего блока 11 формируется вектор оценок параметров сиг-f-i- 1 л л нала cL Udo / сС , . , . // Формула изобретения Адаптивный измеритель параметров сигнала, содержащий последовательно соединенные блок прореживания нульпересечений и формирователь чисел, соответствующих моментам нуль-пересечений, счетчик числа нуль-пересечений, вход которого соединен с выходом блока прореживания нуль-пересечений, первый блок сравнения,блок памяти, блок управления и решающий блок, причем выходы счетчика числа нуль-пересечений подсоединены к первой группе входов блока сравнения и к адресным входам блока памяти, вторая группа входов блока сравнения соединена с выходакш блока памяти, а ее выход подключен к входу блока управления, отличающийся тем, что, с целью повышения точности измерения параметров сигнала, излучаемого движущимся объектом, при ограниченной априорной информации о динамике движения объекта, дополните;льно введены последовательно соединенные формирователь статистик, блок матричного умножения, формирователь отношения сигнал-шум и второй блок сравнения, выходы которого подсоединены к входам решающего блока, входы формирователя статистик соединены с выходами формирователя чисел, соответствующих моментам нуль-пересечений, выходы блока матричного умножения также подсоединены к соответст- j
вующим входам второго блока сравнения, а вторая группа выходов формирователя статистик соединена с второй группой входов формирователя отношения сигнал-шум, выходы блока памяти подсоединены к соответствующим входам формирователя статистик, блокаматричного умноже ни я, формирователя отношения сигнал-шум и решающего блока, управляющие входы которых соединены с выходами блока управления, поток исследуемых нуль-пересечений сигнала поступает на вход блока прореживания нуль-пересечений.
Источники информации, . принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 700842, кл.С 01 R 23/00, 1979.
2.Авторское свидетельство СССР по заявке 2865396/18-21, .1,9.80.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный измеритель параметров сигнала | 1981 |
|
SU970251A1 |
| Адаптивный цифровой измеритель параметров сигнала | 1981 |
|
SU1013867A1 |
| Устройство для измерения периода и его производной | 1980 |
|
SU868690A1 |
| Адаптивный измеритель параметров сигнала | 1987 |
|
SU1465802A2 |
| Устройство для цифрового анализа сигналов | 1978 |
|
SU748267A1 |
| Устройство для измерения частоты | 1979 |
|
SU813291A1 |
| Цифровой измеритель задержки | 1981 |
|
SU951228A1 |
| Цифровой панарамный измеритель частоты | 1982 |
|
SU1048420A1 |
| Устройство для цифровой обработки сигналов | 1979 |
|
SU879494A1 |
| Цифровой панорамный измеритель частоты | 1980 |
|
SU930150A1 |
Г2о
S
1я
Ч
Lbb
7У V
о
1
IS
Ы
гб
27
Фи1.1
