Устройство относится к системам автоматического контроля и регулирования.
Известны преобразователи перемещения в число импульсов, содержащие двигатель, с валом которого связаны роторы датчика питания фазовращателя и датчика шкалы, роторные обмотки которых соединены с выходом генератора возбуждения, статорные обмотки датчика шкалы подключены ко входам блоков формирования управляющих напряжений, к выходам которых подключены инверторы, .статорпые обмотки датчика питания соединены со статорными обмотками фазовращателя, синусная обмотка ротора которого соединена со входом формирователя импульсов, выход формирователя импульсов соединен с первым входом логического блока.
Недостатками известных устройств являются сложность конструкции и сравнительно низкое быстродействие.
С целью упрощения конструкции преобразователя и повышения его быстродействия в преобразователе выходы блоков формирования управляющих напряжений подключены ко вторым входам логического блока, к третьим входам которого подключены выходы инверторов.
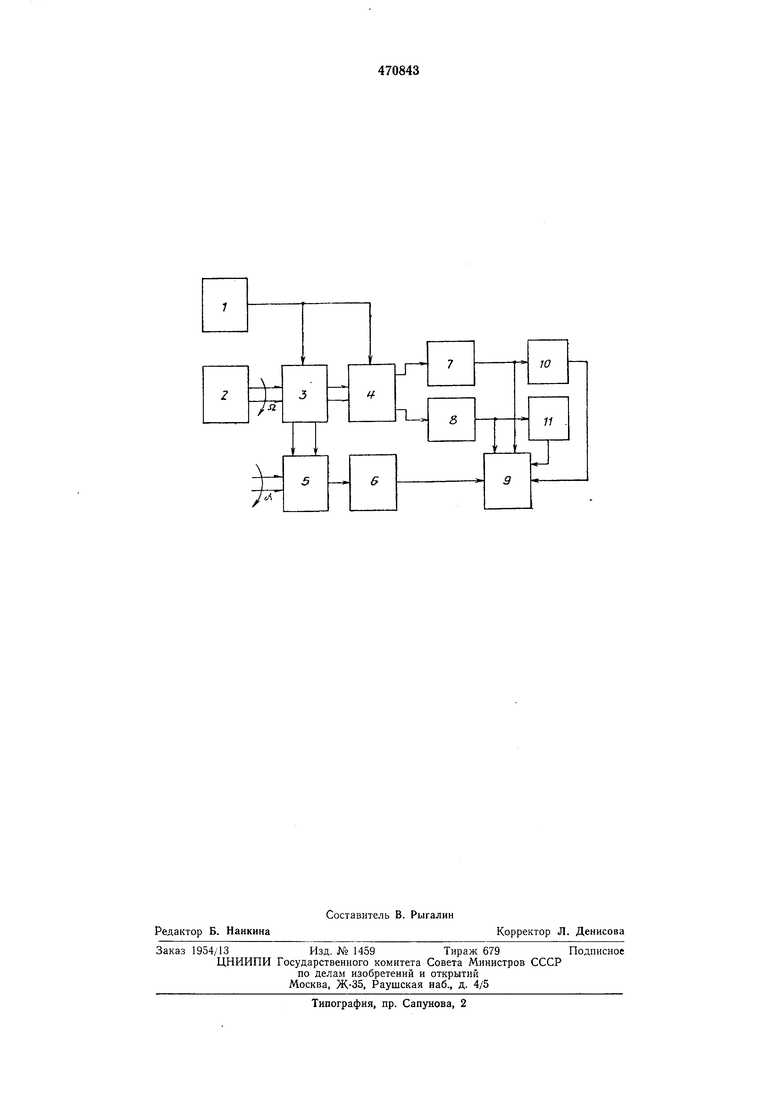
На чертеже приведена блок-схема устройства.
Преобразователь перемещения в число импульсов содержит генератор возбуждения 1, двигатель 2, датчик питания 3, датчик шкалы 4, фазовращатель 5, формирователь импульсов 6, блоки 7, 8 формирования управляющих напряжений, логический блок 9, инверторы 10 и И. Выход генератора возбуждения 1 соединен с роторными обмотками датчиков питания 3 и щкалы 4. Вход формирователя IMпульсов 6 соединен со вторичной обмоткой двухфазного фазовращателя 5, первичные обмотки которого соединены со статорными обмотками датчика питания 3. Статорные обмотки датчика щкалы 4 соединены со входами
формирующих блоков 7 и 8. Выходы блоков 7, 8 и формирователя импульсов 6 соединены со входами логического блока 9.
Работает преобразователь следующим образом.
Напряжение синусоидальной формы частоты со подается с генератора возбуждения I на датчик питания 3 и датчик шкалы 4. Число пар полюсов (коэффициент электрической редукции) датчика питания 3 равен единице, а
датчика шкалы 4 равен Р. Датчики питания 3 и щкалы 4 могут быть как индукционного, так и емкостного типов. Роторы обоих датчиков вращаются непрерывно со скоростью Q двигателем 2. За один оборот ротора датчика
питания 3 вектор магнитного (электрического)
поля датчика питания 3 повернется на 2я эл. град., а вектор магнитного (электрического) поля датчика шкалы 4 за один оборот ротора повернется на 2я Р раз. Сигналы с выхода синусного Si и косинусного Sz каналов датчика питания 3 (сигналы, снимаемые со статорных обмоток датчика питания) описываются выражениями:
S - Л; sincu/SinQ ; 62 -- 2 sin м/ cos Q(,
аргумент которых по огибающей за один оборот вала двигателя 2 изменяется от О до 2я. Сигналы с выхода синусного 5з и косинусного Si каналов датчика шкалы 4 (сигналы, снимаемые со статориых обмоток датчика шкалы) описываются выражениями
5з Лз sin ш/. sin Р Ш S -- А sin ш/ cos Р и/,
аргументы которых по огибающей за оборот вала двигателя 2 изменяется от О до 2п Р раз.
Сигналы 5з и 4, снимаемые с датчика шкалы 4, поступают на формирующие блоки 7 и 8 соответственно. Каждый формирующий блок представляет собой фазочувствительный выпрямитель и пороговое устройство. Блоки 7 и 8 формируют перепады напряжений из огибающих сигналов 5з и 54.
В предлагаемом преобразователе неподвижная шкала образуется перепадами напряжений блоков 7 и 8. Таким образом, в пределах любого полюсного деления датчика шкалы 4 формируется последовательность из четырех импульсов, а за оборот ротора датчика шкалы формируется последовательность из 4:Р импульсов.
Питание двухфазного фазовращателя 5 осуществляется выходными сигналами Sj и 82 датчика питания 3. Сигиалы 5i и S, снимаемые со статорных обмоток датчика питания, подаются на косинусную и синусную первичные обмотки двухфазного фазовращателя 5 соответственно. При повороте ротора двухфазного фазовращателя 5 на угол а и при таком питании его получается сигнал S, снимаемый со вторичной обмотки фазовращателя
Ss -Aismwi- sin Q Л cos Я а + aSin wi х X cosQ/Л sinPя
При , и Лг4- Л2-Л 5 выражение для Ss можно записать
Sj - Лг sin ш (sin й cos Р а -j- COS Q/ Sin Pa) : Л5Sinш sin(Pa-f Q/).
Таким образом, на выходе двухфазного фазовращателя 5 получается сигнал Ss, приращение фазы которого пропорционально приращению угла поворота вала.
По сигналу S формирователь импульсов 5 формирует короткий по длительности импульс, соответствующий переходу огибающей сигнала Ss через нулевое нолол ение от отрицательных значений к положительным. По перемещению импульса, сформированного формирователем импульсов 6, относительно неподвижной шкалы логический блок 9 формирует импульсы, число которых пропорционально приращению угла поворота вала и выдает их по одному из каналов «вращение влево или «вращение вправо в зависимости от направления вращения контролируемого вала.
За один оборот роторов датчиков питания 3 н шкалы 4 выдается один импульс с формирователя импульсов 6 и f импульсов с каждого блока 7, 8 (Р импульсов неподвижной шкалы). Так как в предлагаемой схеме преобразователя фаза электрического сигнала, снимаемого с фазовращателя 5 в пределах любого полюсиого деления его, квантуется на 4Я дискретных значений, то при использовании двухфазного фазовращателя с числом пар полюсов (коэффициентом электрической редукции) равным, например, Р, разрешающая
способность предлагаемого преобразователя будет определяться выражением
: 4-Я-Я 4Р.
Предмет изобретения
Преобразователь перемещения в число импульсов, содержащий двигатель, с валом которого связаны роторы датчика питания фазовращателя и датчика шкалы, роторные обмотки которых соеди 1ены с выходом генератора возбуждения, статорные обмотки датчика шкалы подключены ко входам блоков формирования управляющих напряжений, к выходам которых нодключены инверторы, статориые обмотки датчика питания соединены со статорными обмотками фазовращателя, синусная обмотка ротора которого соединена со
входом формирователя импульсов, выход формирователя импульсов соединен с первым входом логического блока, отличающийся тем, что, с целью упрощения конструкции и повышения быстродействия работы устройства, выходы блоков формирования управляющих напряжений подключены ко вторым входам логического блока, к третьим входам которого подключены выходы инверторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ «УГОЛ — КОД» | 1973 |
|
SU397953A1 |
| Преобразователь угол-код | 1972 |
|
SU464004A1 |
| Устройство для определения точности вращающегося трансформатора | 1975 |
|
SU565354A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |
| Преобразователь угла поворотаВАлА B КОд | 1979 |
|
SU798945A1 |
| Устройство для формирования опорных сигналов управления синхронным двигателем | 1988 |
|
SU1700737A1 |
| Электропривод переменного тока | 1984 |
|
SU1264293A1 |
| ДАТЧИК ПОЛОЖЕНИЯ | 2017 |
|
RU2654371C1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |