(54) ПРЕОБРАЗОВАТЕЛЬ «УГОЛ - КОД
са подключены ко входам блока 13 формирования кода.
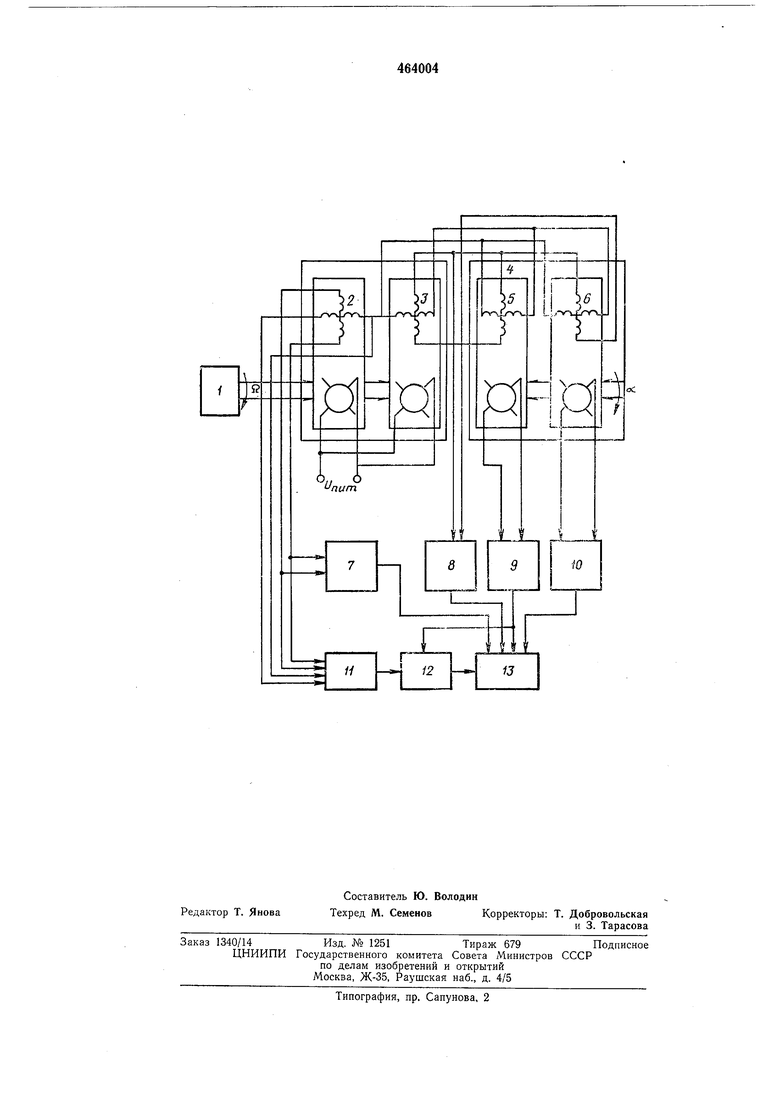
Преобразователь работает следующим образом.
На входы датчиков 4 кодирующего элемента через датчик 3 питания .поступает напряжение питания, модулированное частотой вращения вала двигателя 1 Q, а, следовательно, и напряжение,. модулированное частотой вращения ротора датчика 3 питания.
За каждый цикл преобразования, равный одному периоду напряжения питания датчиков 4 кодирующего элемента, подаются напряжения питания, пропорциональные sinfti и cosQ на косинусные и синусные обмотки статоров датчиков 5 и 6 точного и грубого отсчетов соответственно. При подаче указанных напряжений с синусных обмоток роторов датчиков 4 кодирующего элемента снимаются напряжения, сдвиг фаз огибающих которых относительно огибающей выходного сигнала датчика 3 питания, например, .пропорционального sinQ/, определяется углом поворота контролируемого вала. Напряжения, снимаемые с синусной обмотки статора датчика 3 питания и с синусных обмоток роторов датчиков 5 и 6 точного и грубого отсчетов подаются на формирователи 8, 9 и 10 импульсов соответственно, которые формируют импульсы в моменты перехода огибающих сигналов через нулевое положение от отрицательйых значений к положительным.
Единицей измерения временных интервалов, пропорциональных значениям фазовых сдвигов сигналов датчиков 4 кодирующего элемента относительно сигнала питания датчика 3, является период огибающей выходного сигнала датчика 2 щкалы.
Напряжение, снимаемое с синусной обмотки статора датчика 2 шкалы, подается на формирователь 7 импульсов, кроме того, выходные напряжения датчика 2 шкалы, пропорциональные sinriiQ и COST) Q, подаются на преобразователь «напряжение - код, преобразующий эти напряжения, соответствующие углу поворота датчика 2 шкалы, в код, где Р, - число пар полюсов датчика 2 шкалы.
Преобразование выходных напряжений датчика шкалы производится в пределах каждого полюсного деления датчика шкалы, и цикл преобразования равен периоду напряжения датчика шкалы, т. е. равен изменению угла 2-к
датчика щкалы на
механических радиусов. Съем информации с преобразователя 11 «напряжение - код производится вентилями блока 12 опроса по нулевому значению выходного сигнала датчика 5 точного отсчета, т. е. при формировании импульса, формирователем 9 импульсов, соединенного с выходом датчика точного отсчета. Эта информация является кодом младших разрядов точного отсчета преобразователя «угол - код, формирование которого производится за интервал Времени между моментом возникновения импульса с формирователя 7 и моментом возникновения импульса с формирователя 9. Количество измеряемых периодов напряжений датчика 2 щкалы, укладывающееся от пачала цикла преобразования, определяемого нулевым значением напряжения питания датчиков кодирующего элемента, пропорционального :ШШ, до момента возникновения импульса с формирователя 9 определяет код старших разрядов точного отсчета преобразователя «угол - код в пределах полюсного деления датчика точного отсчета, а количество измеряемых периодов напряжений датчика щкалы, которое укладывается от начала цикла преобразования до момента возникновения импульса с формирователя 10, определяет старшие разряды кода угла, эквивалентного
числу пройденных пар полюсов датчика точного отсчета от исходного положения контролируемого вала.
iB блоке 13 формирования кода, на входы которого поступают сигналы со схем совпадения блока 12 опроса и с формирователей 7- 10 имлульсов, производится согласование отсчетов и формирования кода, эквивалентного углу поворота контролируемого вала.
Разрешающая способность предлагаемо1 и
преобразователя «угол - код определяется как
.P,P,
где V - разрещающая способность преобразО|Вателя «иаиряжение - Р - число пар полюсов датчика шкалы; Р - число пар полюсов датчика 5 точного отсчета кодирующего элемента.
Предмет изобретения
Преобразователь «угол - код, содержащий двигатель, с валом которого связаны роторы датчика шкалы и датчика питания кодирующего элемента, блок формирования кода,
блок опроса, преобразователь «напряжение - код и кодирующий элемент, выполненный в виде датчиков точного и грубого отсчетов, статорные обмотки которых соединены со статорными обмотками датчика питания, синусные обмотки роторов датчиков точного и грубого отсчетов соединены со входами одних формирователей имиульсов, синусные обмотки статоров датчиков шкалы и питания подключены ко входам других формирователей
импульсов, выходы формирователей импульсов и блока опроса соединены со входами блока формирования кода, о т л и ч а ю ш и йся тем, что, с целью повышения точности работы устройства, статорные обмотки датчика
шкалы соединены со входами преобразователя «напряжение - код, выходы которого соединены с первыми входами блока опроса, вторые входы которого соединены с выходом формирователя импульсов, соединенного с
выходом датчика точного отсчета.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ «УГОЛ — КОД» | 1973 |
|
SU397953A1 |
| Преобразователь перемещения в число импульсов | 1973 |
|
SU470843A1 |
| Преобразователь угол-код | 1974 |
|
SU461434A1 |
| Датчик угловых перемещений | 1986 |
|
SU1395816A1 |
| ДАТЧИК ПОЛОЖЕНИЯ | 2017 |
|
RU2654371C1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU734775A1 |
| СТАБИЛИЗАТОР ВООРУЖЕНИЯ БОЕВОГО МОДУЛЯ | 2014 |
|
RU2550379C1 |
| Датчик положения ротора | 2023 |
|
RU2816167C1 |
| Двухотсчетный преобразователь углапОВОРОТА ВАлА B КОд | 1979 |
|
SU840995A1 |
| Преобразователь угол-код | 1974 |
|
SU457087A1 |