iy струн, Вытекающем Из первого сопла чувствительнсго элемента, комт-енсируется силой дейст1вня на нодвижпую :нластнну струи, вытекающей из компенсационного- второго сопла чувствительного элемента, -исключается влияние характеристик основеого лерБОГо сопла (ее .нелинейности и др.) 1на характеристику устройства (В целом. Благодаря этому, а та-кже благодаря стрОГОЙ :лр0порциональн0сти между давлениями пе|ргд входными сопла ш и соответствующими силалш, действующими на пластину, и да;влеиие.м перед выходным .компенсационным СОплом и соответствующей с:;лой, действующей на пластину, обеспечивается высокая точность выполнения операций сравнения и сумм ирования для Ш1 рокого диапазона изменения давлений.
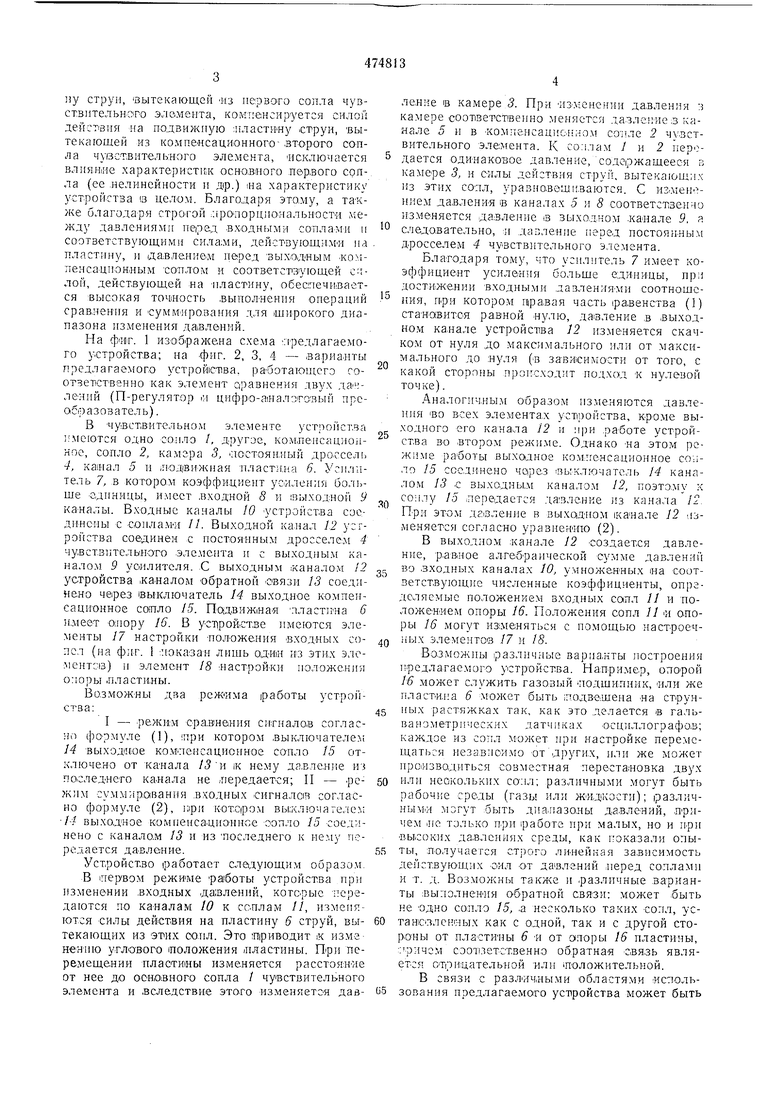
На флгг. 1 изображена схема Мредлагаемого устройства; на фиг. 2, 3, 4 - вариа нты предлагаемого устройства, ра-ботающегэ гоотвепственно как элемент оравнения двух да ;лений (П-регулятор i:i цифро-а1иал;;1говый преобразователь).
В чувствительном элементе устройства меются одно сопло /, другое, комленсациолное, сопло 2, камера 3, .постояи.иый дро.ссель 4, катал 5 и подвижная пласти.на 6. Усилитель 7, в котором коэффи.циеит усиления больще единицы, имеет .входной 8 и выходной 9 каналы. В.ходные каналы 10 устройства соедпнеиы с соилаМИ //. Выходной канал 12 устройства соединен с постоянным дросселем 4 чувствительного элемента п с выходным каналом .9 уоилителя. ,С выходным каналом /2 устройства 1каналом обратной -связц 13 соединено через выключатель 14 выходное KOMneirсацнонное сопло /5. По ДВИЖ|ная -лластп-на 6 и.меет о;пору 16. В уст|рой:Стве имеются элементы 17 настрой.ки -положеиия входных сопел (на фиг. 1 :;(оказан лишь ojHiH из этил эломент 1в) п элемент /8 :настрой.ки положения опоры .пластины.
Возможны два режима работы ycTpoiiства:
I - сравнения сигналов согласно формуле (1), 1при котором ,выключателе ; 14 выходное компенсационное соило 15 отключено от канала /5и IK нему давление из последнего канала не передается; II - режим суммирования входных сигнало1В согласно формуле (2), i:ipn котором выключателем; -// вы.ходное комиеисадиоинсе сопло /5 соединено с канало.м 13 и из последнего к нему передается давление.
Устройство работает следующим образом.
В первом режиме ра1боты устройства при изменении входных давлений, которые передаются по каналам 10 к соплам II, измепя ются силы действия на пластину 6 струй, вытекающих из этих оо.пл. Это ПриВОдит « изме нению углового положения .пластины. При перемещении нластины изменяется расстоянИе от нее Д.О оонОВного сопла / чувствительного элемента и вследствие этого изменяетоя давление в камере 3. При Изменении давления з камере соот1ветст вепно меняется да.злепнез канале .5 и в KOMneHcaHnc.HHOM сопле 2 чу.вствительного элемента. К со:1лам У и 2 перодается одинаковое давление, содержащееся в камере 3, и силы действия струй, вытекаюндпх из этих сопл, уравновешиваются. С из.менонием .давления в каналах 5 и S соответст ве.нно изменяется давление IB выхо.дном .канале 9. а следовательно, н .дапление перед постоянным дросселем 4 чувствительного элемента.
Б.тагодаря тому, что усплптель 7 имеет коэффициент усиления больще единицы, при достижении входными .давления-ми соотношения, при котором правая часть равенства (1) становится ра.вной нулю, давление в выходном ка.нале устройства 12 изменяется скачком от нуля до .максимального или от максимальиого до нуля (в зависимоСти от того, с какой стороны пропсхэдит подход К нулевой точке).
Аналогичным образом изменяются давлеппя во всех элемента.х устройства, кроме выходного его 12 и мри .работе устройства во втором режи.ме. Однако -на этом режиме работы выходное ком: генсацпонное соило /5 соединено :вык.лючатель 14 каналом 13 с выходным каналом 12, пoэтo.iy к соплу 15 передается давление из канала 12. При этом дг1зление в выходном (канале 12 изменяется согласно уравиеншо (2).
В ВЫХО.ДНОМ .канале 12 создается давление, р.авное алгебраической сумме давлений во .входных каналах 10, умноженных иа соответствующие численные коэффициенты, определяемые положением входных сопл // и положен-ием опоры 16. Положения сопл 11 И о.поры 16 могут изМеняться с помощью настроечных элементов 17 и /S.
Возможпы различные вариа.нты построения 1;.редлагаемого устройства. Например, опорой 16 служить газовый подшипник, «ли же пласткна 6 может быть 1подве..шена .на струнных растяжках так, как это .делается в гальвано метр ir-iecKHX датчиках о.сциллографо.в; каждое из сопл может при настройке перемещаться независимо от други.х, или же может ир01изво.д,пться совместная переста.новка двух пли нескольких сопл; различными могут быть рабочие среды (газы или ЖИдкости); различHbiMiH могут быть дпалазоны давлений, .причем iHC только При работе при малых, но и п.ри ВЫСОКИХ да.влениях среды, как показали опыты, я.олучается строго линейная зависимость действуюидих сил .от давлений .перед соплами и т. д. Возможны также и различные варианты выполнения обратной связи: может быть не ОДНО со:пло 15, .3. несколько таких сопл, уста нсзленчых как с о.дной, так и с другой стороны от пластины 6 а от опоры 16 пластины, рпчсм сэотзетственно обратнаЯ связь является отрицательной или положительной.
В связи с разЛИЧ(Ными областями использования предлагае.мот-0 устройства может быть
.1 количество |ЗхсД:Них со;:1л. Например, и.ри «работе преалагаемого ycrpJiiCT.B: в первом из указанных режимов ixiiix элемента сразне/ьчя цзух дазленлй (с,м. (j)iir. 2) имегтся соответственно лишь два .входных .канала 10 и .два 1зходных сопла //; выходное кo пeнcaциолиое сопло в данном случае отключено выключателем (на чертеже «е показано); в выходна.м ка:Нале 12 даВление из-меняется скачком, когда .входные давления .при их изменении становятся равными одно другому. Прп работе предлагаемого устройства во втором 113 указа нных режимов в качестве П-регулятора {см. фиг. 3) схема егб отличается от схе.мы, иоказаиной на фИт. 2, тем, что имеется выходное .компенсационное сопло 15, три входных канала 10 и три входных .сопла //, с.тужашле для за.дания входной разности давлений и давления контрольной точки, .и имеется элемент 17 «астройки со.в,ме|Стного положения
двух СОИЛ 11, .с ПО,.МОЩЬЮ которого при настрой КС может изменяться коэффициент yci;ления регулятора.
При работе устройства в третьем реж)1ме в качестве цифро-аналогового преобразователя (см. фиг. 4) сопла // имеют такие диа.метры сечений и устано.влены относительно опоры 16 .на таких расстояниях, что давление в выходном канале 12 устройства отран ает величину двоичного числа, цифрам разрядов которого пропорциональны силы действия струй, вытекающих из входных сопл.
Соотзетс. различными могут быть количества и относительное расположение сопл при пост|р.оениИ .на базе иредлагаемого устройства различных типов нуль-органов, сумматоров, вычитателей, преобразователей сигналов, ПИ-регуляторов, ПД-регуляторо,в ч других вычислительных управляющих устоойств.
Предмет и з о б р е г е н и я
Струйно-меха.пичсокое вычислительное устройство, содерх ащее сопла, подключенные к входным каналам н рас-иоложбнные по обе сторо;ны от ПОДВИЖНО пласт 1ы с о;: 0|рой, чувствительный , ,вь пол енНый в
двух расположенных по обе стороны :ИОДВ Жной .пласти1ны сопл, одно котор)х связано через камеру с остоя нны,м дросселем, усилитель, вход которого € камерой чувствительного элемента, выходной канал устройства, соедине 1нь Й через выключатель с выходным ком.пенсащюнным соплом, элементы .наст1рой «1 со:ил, подключенных к в.ходным каналам, и опоры подвижной Пластины, отличающееся тем, что, с целью улучшения динам 1чеоких хара.ктерист ;к, второе сопло чувствительного элемента связано с камерой, которая лостоя.ННый дроссель -соединена с выходом усилителя и выходным каналом устройства.
12
15
к
(к „
10
и/„
Z:L
1д
В
) iTllTin
сриг Z
1 { ITfTTTf
/с
J
ЗЧ .n
/ А А Л ;
-16
«PwJ.4
| название | год | авторы | номер документа |
|---|---|---|---|
| Струйно-пневматическая система регулирования соотношения двух параметров | 2023 |
|
RU2817551C1 |
| СТРУЙНО-ПНЕВМАТИЧЕСКИЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ (ПИ) РЕГУЛЯТОР | 2021 |
|
RU2773623C1 |
| СТРУЙНО-ПНЕВМАТИЧЕСКИЙ ПОЛУПОСТОЯННО РАБОТАЮЩИЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ (ПИ) РЕГУЛЯТОР | 2021 |
|
RU2773233C1 |
| СТРУЙНО-ПНЕВМАТИЧЕСКИЙ ПРОПОРЦИОНАЛЬНЫЙ РЕГУЛЯТОР | 2018 |
|
RU2676362C1 |
| СТРУЙНО-ПНЕВМАТИЧЕСКИЙ ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР | 2021 |
|
RU2768104C1 |
| СТРУЙНО-ПНЕВМАТИЧЕСКИЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ (ПИД) РЕГУЛЯТОР | 2021 |
|
RU2768107C1 |
| СТРУЙНО-ПНЕВМАТИЧЕСКИЙ ПОЛУПОСТОЯННО РАБОТАЮЩИЙ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ (ПИД) РЕГУЛЯТОР | 2021 |
|
RU2768105C1 |
| СТРУЙНО-ПНЕВМАТИЧЕСКИЙ ПОЛУПРОПОРЦИОНАЛЬНЫЙ РЕГУЛЯТОР | 2021 |
|
RU2773115C1 |
| СТРУЙНЫЙ ДАТЧИК ДАВЛЕНИЯ | 2019 |
|
RU2713088C1 |
| Струйно-фотокомпенсационный пропорционально-интегрально-дифференциальный (ПИД) регулятор | 2022 |
|
RU2781762C1 |