1
Изобретение относится к области судостроения.
Известны суперкавитирующие гребные винты с изменяемой геометрией лопастей, содержащие ступицу, механизм перекладки и составные лопасти КЛИНОВИДНОГО нрофиля, кажждая из которых образована из установленной на ступице основной части, имеющей острую входящую кромку, и дополнительного , элемента меньшей ширины с тупой выходящей кромкой, жестко скрепленного с задней частью ступицы и примыкающего к основной части лонасти с одной из ее сторон.
Однако в известных суперкавитирующих гребных винтах с изменяемой геометрией лопастей наблюдается гидродинамическое облегчение винта при уменьшении шага, нанример в процессе преодоления судном горба сопротивления. В соответствии с общим падением гидродинамических характеристик, свойственным ДЛЯ существующих винтов на пониженных относительных поступях переходного режима, это приводит к недобору мощности двигателя и снижению упора винта даже при достижении максимального числа оборотов проиульсивной турбины. Это происходит, если суперкавитирующий гребной винт спроектирован из условия отимальности режима полного хода, т. е. получения максимального
К.П.Д. при ПОЛНОМ использовании мощности СИЛОВОЙ установки на расчетной скорости. Кроме того, известные гребные винты конструктивно СЛОЖНЫ в связи с трудностью создания прочной заделки поворотной части лопасти в
ступице.
Цель изобретения - регулирование тяговых характеристик гребного винта и иовыщение надежности его конструкции. Для этого основная часть лонасти жестко
соединена со ступицей, а задняя часть последней выполнена поворотной, кинематически связанной с механизмом перекладки и подвижной в осевом направлении относительно основной части ступицы; при этом дополнительный элемент лопасти выполнен скользящим относительно основной части лопасти и сопрягается с ней по винтовой поверхности постоянного шага. Задняя и основная части ступицы могут
быть связаны между собой скользящим зацеплением, состоящим из направляющего винтового иаза на основной части ступицы и входящего в него пальца, который закреплен на задней части ступицы.
С целью уменьшения вредных гидродинамических потерь при изменении геометрии лопастей кольцевой зазор между основной и задней частями ступицы, образующийся при их раздвилсении, может быть закрыт обтекателями, которые целесообразно закрепить лопастями на основной части ступицы по ее окружности.
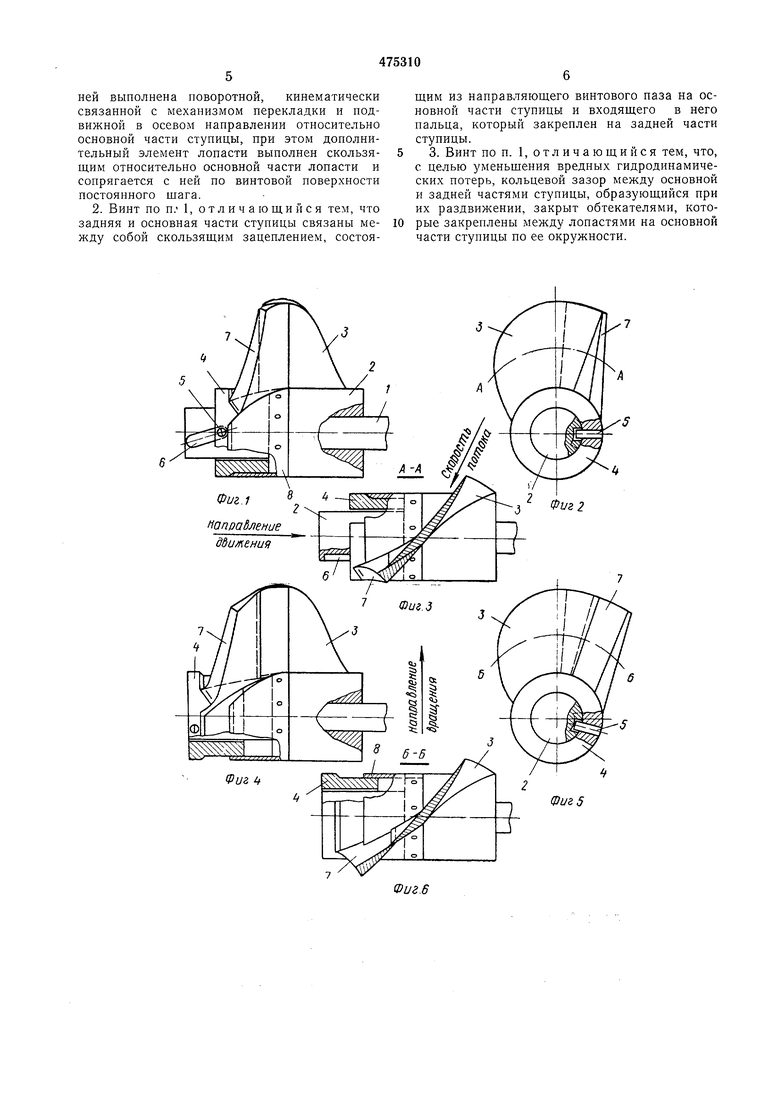
На фиг. 1 изображен предложенный гребной винт при расчетной ширине лопасти, вид сбоку; на фиг. 2 - то же, вид сзади; на фиг. 3 - сечение по А-А на фиг. 2; на фиг. 4 - гребной винт при увеличении ширины лопасти на малой скорости, вид сбоку; на фиг. 5 - то же, вид сзади; на фиг. 6 - сечение по Б-Б на фиг. 5; на фиг. 7 - клиновидный составной профиль, скользящий элемент которого примыкает к основной части лопасти со стороны нагнетающей поверхности.
На гребном валу 1 неподвижно закреплена основная часть 2 ступицы, жестко соединенная с основной частью 3 каждой лопасти. Задняя часть 4 ступицы выполнена поворотной и одновременно подвижной в осевом направлении относительно основной части 2 стуницы и имеет с ней скользящее зацепление при помощи пальцев 5 и паправляющпх винтовых пазов 6 (см. фиг. 1, 2). Конструкция винтового зацепления обеих частей ступицы не является принципиальной и может быть реализована любым из известных способов с включением подщипников качения для уменьшения трения.
Подвижная задняя часть 4 ступпцы жестко скреплена с дополнительными элементами 7 каждой лопасти, которые имеют клиновидное сечение с тупой выходящей кромкой и плотно примыкают к основной части 3 лопасти со стороны ее засасывающей поверхности. Кольцевой зазор между обеими частями 2 и 4 ступицы закрывается обтекателями 8, которые фиксируются между лопастями на основной части 2 ступицы по ее окружности. Основная часть 3 и дополнительный элемент 7 лопасти образуют на расчетной скорости единый клиновидный профиль с заданной кривизной нагнетающей поверхности и минимальной шириной лопасти (см. фиг. 2 и 3). Поверхность сопряжения обеих частей каждой лопасти является правильной винтовой поверхностью, щаг которой в частном случае равен шагу направляющих винтовых пазов 6 на теле основной части 2 ступицы. При этом винтовая линия, по которой сопрягаются обе части составного клиновидного профиля, направлена от нагнетающей поверхности в районе тупой выходящей кромки наискось вдоль хорды до пересечения с засасывающей поверхностью профиля (см. фиг. 3). Для устранения трения между обеими частями каждой лопасти при перекладке межпозиционный участок направляющего винтового паза 6 может быть выполнен с аксиально-переменным шагом. Механизм перекладки, кинематически связывающий обе части 2 и 4 ступицы, может размещаться в заднем обтекателе ступицы (на чертеже не показан).
Изменение геометрии лопастей па переходном режиме движения достигается следующим образом (см. фиг. 4-6). Под действием усилия, создаваемого механизмом перекладки,
подвижная задняя часть 4 ступицы вместе с фиксированными на пей дополнительными эле.ментами 7 лопастей сдвигается по заданной винтовой траектории относительно основных частей 2 и 3 ступицы и лопастей. Необходимая траектория перемещения обеспечивается за счет скольжения пальца 5 по направляющему пазу 6 до предельного заднего положения (см. фиг. 4). При этом дополпительпый
элемент 7 лопасти, образующий тупую выходящую кромку, работает как скользящий выдвижной закрылок, т. е. сдвигается по основной части 3 лопасти в сторону увеличения ее ширины и кривизны (см. фиг. 5, 6). В результате происходит гидродинамическое утяжеление гребного винта, необходимое для устранения недобора мощности и повышения упора при падении кавитационных характеристик (на фиг. 7 показано размещение скользящего
дополнительного элемента 7 лопасти со стороны пагнетающей поверхности ocnoonoii части 3 лопасти).
Предлагаемая конструкция суперкавитпрующего гребного вппта с изменяемой геометрией
лопастей позволяет спроектировать оптимальный гребной винт на режим полного хода, предельно использовать мощность пропульсивпой турбппы па горбе сопротивления за счет одновременного увеличения кривизны и щирикы лопастей без потери шага и перевести режим работы впнта в зону более высоких к.п.д. и относительных поступей за счет некоторого снижения числа оборотов при утяжелении гребного винта; значительно увеличить располагаемую тягу на горбе сопротивления, что исключает необходимость работы двигателя на форсированных режимах; более равномер}10 распределить нагрузку по щирине лопасти и тем самым повысить местную прочность лопасти в районе острой входящей кромки за счет снижения уровня напряжений; увеличить прочность корпевого сечения основной части лопасти за счет жесакого соединения ее со ступицей; исключить механизм поворота основной части лопасти из состава устройства; избежать действия цеггтробежных сил па механизм изменения ширины в связи с отсутствием радиальпо-поворотных частей лопасти.
П р е д :,i е т изобретения
1. Суперкавитирующий гребпой винт с изменяемой геол1етрией лопастей, содержащий ступицу, мехапиз.м перекладки и составные лопасти клиновидного профиля, каждая из которых образована из устаповлеппой на ступи-, пе осповпой части, имеющей острую входящую кромку, и дополнительного элемента меньщей ширины с тупой выходящей кромкой, жестко скрепленного с задней частью ступицы и примыкающего к основной части лопасти с одной из ее сторон, отличающийся тем, что, с целью регулирования тяговых характеристик гребного винта и повышения надежности его конструкции, основная часть лопасти жестко
соединепа со ступицей, а задняя часть последней выполнена поворотной, кинематически связанной с механизмом перекладки и подвижной в осевом направлении относительно основной части ступицы, при этом дополнительный элемент лопасти выполнен скользящим относительно основной части лопасти и сопрягается с ней по винтовой поверхности постоянного шага.
2. Винт по п. 1, отличающийся тем, что задняя и основная части ступицы связаны между собой скользящим зацеплением, состоящим из направляющего винтового паза на основной части ступицы и входящего в него пальца, который закреплен на задней части ступицы.
3. Винт поп. 1, о т л и ч а ю щ и и с я тем, что, с целью уменьшения вредных гидродинамиче ских потерь, кольцевой зазор между основной и задней частями ступицы, образующийся при их раздвижении, закрыт обтекателями, закреплены между лопастями на основной части ступицы по ее окружности.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГРЕБНОЙ ВИНТ С ИЗМЕНЯЕМОЙ КРИВИЗНОЙ ЛОПАСТЕЙ | 1970 |
|
SU416286A1 |
| СУДОВОЙ ДВИЖИТЕЛЬ-КОНЦЕНТРАТОР | 2009 |
|
RU2438917C2 |
| СУДОВАЯ ДВИЖИТЕЛЬНАЯ УСТАНОВКА ТИПА "ПОВОРОТНАЯ КОЛОНКА" | 2003 |
|
RU2248302C1 |
| ПРОПУЛЬСИВНЫЙ КОМПЛЕКС ТОРПЕДЫ, СПОСОБ РАБОТЫ И ВАРИАНТЫ ДВИЖИТЕЛЯ | 2020 |
|
RU2757339C1 |
| СПОСОБ ПРОЕКТИРОВАНИЯ ДВУХРЕЖИМНОГО КОНТРПРОПЕЛЛЕРА В ТРЁХ УСТАНОВОЧНОМ ВАРИАНТЕ И ДВУХРЕЖИМНЫЙ КОНТРПРОПЕЛЛЕР В ТРЁХ УСТАНОВОЧНОМ ВАРИАНТЕ | 2014 |
|
RU2569996C1 |
| ГРЕБНОЙ ВИНТ | 2003 |
|
RU2244657C1 |
| ВИНТ ИЗМЕНЯЕМОГО ШАГА | 2000 |
|
RU2164488C1 |
| Судовой винтовой движитель | 2019 |
|
RU2727788C1 |
| ПУСТОТЕЛАЯ ЛОПАСТЬ СУДОВОГО ГРЕБНОГО ВИНТА | 2008 |
|
RU2368534C1 |
| ЛОПАСТНОЙ ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС | 2007 |
|
RU2362706C2 |

,iN Фиг 5
