Изобретение относится к области судостроения, касается вопросов разработки и создания нетрадиционных гребных винтов (ГВ) и может быть использовано на всех судах и кораблях морского и речного флотов.
Известен винт регулируемого шага (ВРШ) с поворотными лопастями (см. Русецкий А.А. Гидродинамика винтов регулируемого шага. - Л.: Судостроение, 1968 г.). Конструкция этого гребного винта позволяет устанавливать лопасти в разное положение на ступице в зависимости от режима работы, и на выбранном режиме ВРШ работает как оптимальный винт фиксированного шага, обеспечивающий эффективное использование мощности двигателя.
К недостаткам ВРШ следует отнести несколько меньший КПД, чем у ГВ фиксированного шага, из-за относительно большего диаметра ступицы (0,35 D, где D - диаметр винта) вследствие необходимости размещать в ней механизм поворота лопастей, сравнительно высокую его стоимость изготовления, а также большие затраты, связанные с установкой ВРШ на судне. Кроме того, из-за возможности утечки масла из поворотного механизма возможно экологическое загрязнение окружающей среды.
Известен также ГВ, в котором предусмотрена возможность "свободного" перемещения лопастей относительно ступицы. Его лопасти крепятся на ступице подвижно и на заданном режиме работы могут свободно перемещаться, например, в плоскости диска движителя и устанавливаться сами на угол, в зависимости от режима работы, в некоторое положение на ступице вследствие взаимно противоположного действия гидродинамических и инерционных моментов относительно шарниров, крепящих лопасти на ступице. Использование такого крепления лопастей позволяет несколько снизить диаметр ступицы (до 0,29D) по сравнению со ступицей ВРШ, что благоприятно отражается на КПД движителя, причем за счет возможного изменения положения лопастей на ступице обеспечивается некоторое расширение диапазона режимов работы движителя (см. доклад, опубликованный в трудах международной конференции "Naval Shipbuilding and Nowadays", 1996) - прототип. Однако путем реализации подвижности в плоскости диска движителя на ступице лопастей с традиционным контуром добиться использования полной мощности двигателя в потребном на практике диапазоне скоростей не представляется возможным.
Задачей предлагаемого изобретения является изменение конструкции ГВ, позволяющей повысить его тяговые характеристики в широком диапазоне режимов движения судна.
Это достигается тем, что у ГВ с лопастями, имеющего ступицу в виде гильзы, в которой размещены комли лопастей, установленных с возможностью поворота каждой лопасти вокруг оси, геометрическая ось которой не совпадает с осью вращения ГВ и радиально смещена от последней, причем лопасти имеют откидку в сторону, противоположную направлению вращения гребного винта, геометрическая ось поворота лопастей составляет с осью гребного винта угол 0-20°, а угол поворота лопастей ψ вокруг этой оси составляет в сторону, противоположную вращению гребного винта, не более 20° от конструктивного положения лопасти, соответствующего углу Ψ=0°, а в направлении вращения ГВ - не более 5°. При этом откидка лопастей выполнена так, что на проекции контура каждой лопасти на плоскость диска гребного винта угол, характеризующий откидку лопастей α, образованный двумя лучами, выходящими из центра ГВ и проходящими - один из них - через середины цилиндрических сечений лопастей на относительном радиусе, равном 0,3, а другой - на относительном радиусе - 1,0, составляет не менее 70°.
Кроме того, максимальное расстояние от оси гребного винта до оси поворота каждой лопасти составляет не более 20% его радиуса, а радиус кривизны наружной поверхности комлей лопастей, размещенных в гильзе ступицы, составляет 0,7-0,75 радиуса ступицы.
Ориентация плоскости поворота по отношению к плоскости диска ГВ, характеризуемая углом 0-20°, позволяет достичь наибольшего КПД движителя в каждом конкретном случае.
Указанное значение угла поворота лопасти в сторону, противоположную вращению ГВ, не более 20° от конструктивного положения лопасти, соответствующего углу Ψ=0°, а в направлении вращения гребного винта - не более 5° позволяет обеспечить перекладку лопасти, в пределах которой гидродинамические характеристики движителя практически не изменяются в широких пределах в зависимости от режимов скоростей движения судна.
Лопасти с контуром, спроецированным на плоскость диска ГВ, с уголом α, равным не менее 70° и характеризующим откидку лопастей, образованным двумя лучами, выходящими из центра ГВ и проходящими один через середины цилиндрических сечений лопастей на относительном радиусе, равном 0,3, а другой - на относительном радиусе, равном 1,0, позволяют стабилизировать коэффициент момента ГВ в широком диапазоне режимов работы движителя и согласовать его работу с двигателем на этих режимах.
Расположение оси поворота в пределах 20% от радиуса ГВ позволяет создавать центробежный момент достаточный для удержания лопасти на ступице в конструктивном положении.
Радиус кривизны наружных поверхностей комлей лопастей, равный 0,7-0,75 от радиуса ступицы, позволяет при перекладке лопастей не выходить комлям лопасти за габариты ступицы, что позволяет закрыть комли лопастей обтекателями.
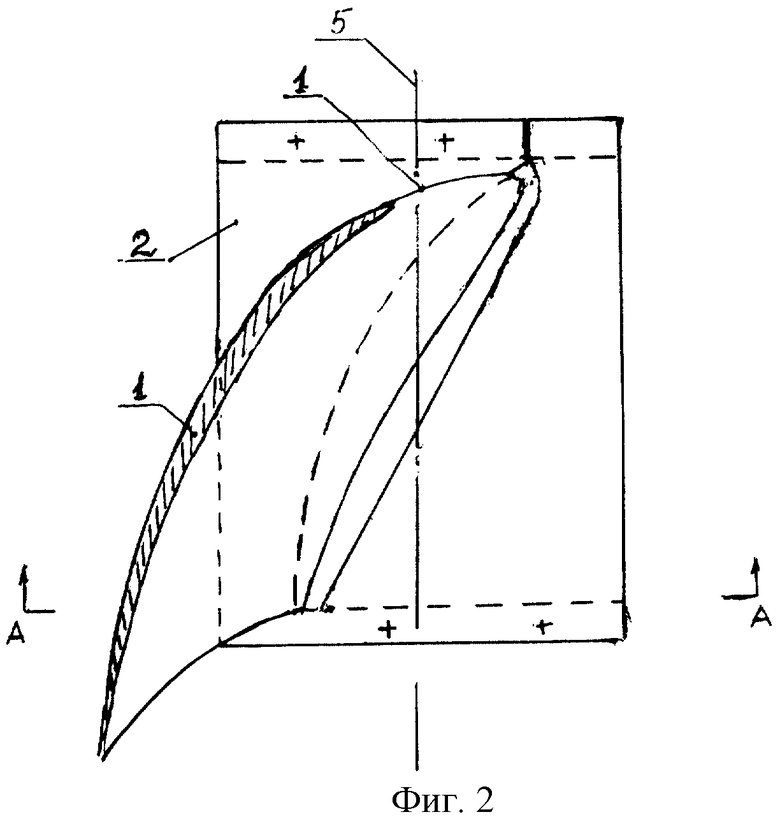
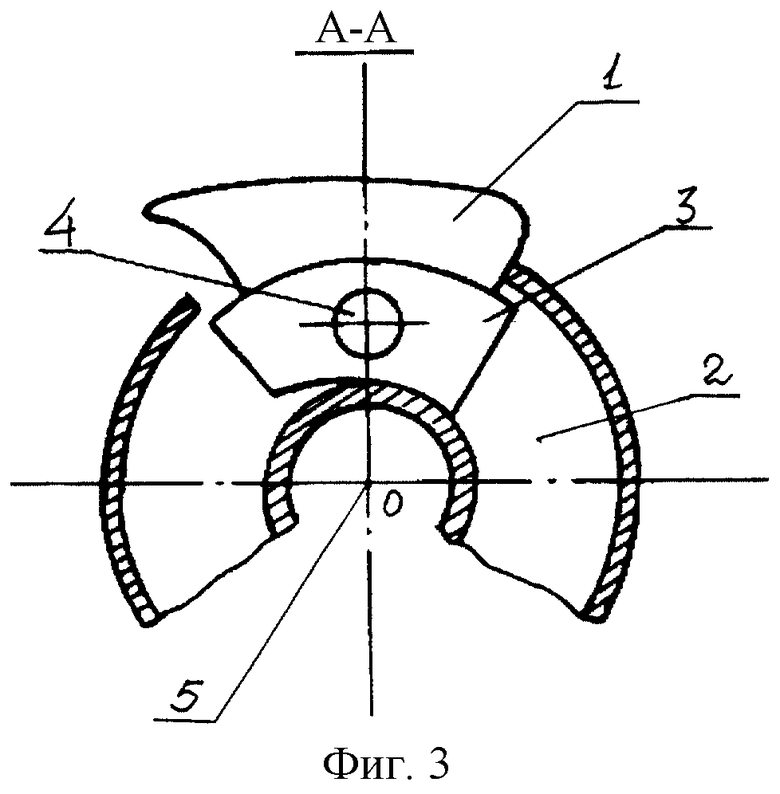
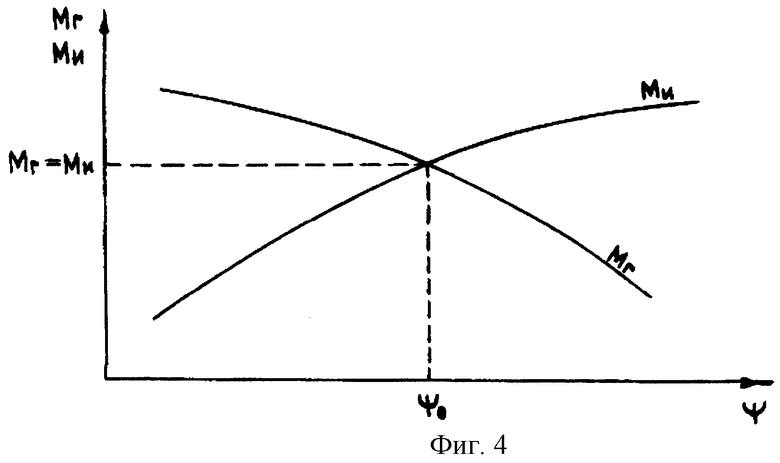
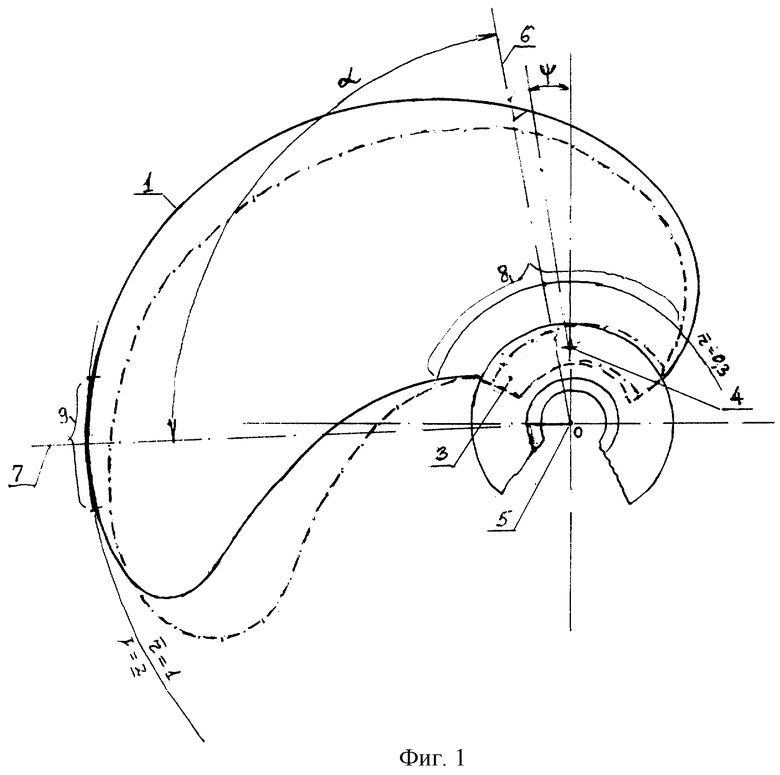
Сущность изобретения поясняется чертежами, где на фиг.1 приведен общий вид ГВ, на фиг.2 - разрез лопасти и ступица ГВ (вид сверху), на фиг.3 - разрез ступицы ГВ по А-А фиг.2, на фиг.4 - кривые изменения моментов относительно оси поворота лопасти, где Ми - момент инерции, Мг - гидродинамический момент, ψ - угол перекладки лопасти, на фиг.5 - гидродинамические характеристики ГВ (коэффициент момента Ко в зависимости от относительной поступи J ГВ).
Лопасти 1 ГВ, имеющие ступицу 2 в виде гильзы, в которую помещены комли 3 лопастей 1, установлены с возможностью поворота вокруг оси 4, не совпадающей с осью с гребного винта 5 (фиг 1-3). Лопасти 1 установлены так, что имеют возможность поворота вокруг оси 4 на угол Ψ=20° в сторону, противоположную вращению ГВ от конструктивного положения лопасти, соответствующего углу Ψ=0°, а в направлении вращения ГВ - не более 5 (не показано). Плоскость поворота каждой лопасти 1 наклонена к плоскости диска гребного винта на угол 0-20°. Лопасти имеют откидку в сторону, противоположную вращению ГВ, которая выполнена так, что на проекции контура каждой лопасти (фиг.1) на плоскость диска ГВ угол, характеризующий откидку лопастей α, который образован двумя лучами 6, 7, выходящими из центра 5 ГВ и проходящими один 6 через середины цилиндрических сечений лопастей 8 на относительном радиусе  а другой - через середины цилиндрических сечений 9 на относительном радиусе
а другой - через середины цилиндрических сечений 9 на относительном радиусе  составляет не менее 70°, Здесь r - текущий радиус, а R - радиус винта.
составляет не менее 70°, Здесь r - текущий радиус, а R - радиус винта.
Работа ГВ происходит следующим образом. На проектном режиме лопасти ГВ находятся в своем конструктивном (начальном) положении, определяемом углом перекладки лопастей ψ0=0 (фиг.4). На фиг.1 конструктивное положение лопасти показано сплошной линией. При увеличении гидродинамической нагрузки на лопасти они сами поворачиваются вокруг оси 4 и устанавливаются в рабочее положение, показанное на фиг.1 штрихпунктирными линиями, вследствие действия на лопасть гидродинамических и восстанавливающих (центробежных) сил, а гидродинамические характеристики изменяются в соответствии с пунктирной линией, как показано на фиг.5. Перемещения лопастей на ступице при работе ГВ с предлагаемым контуром обеспечивают такое изменение геометрических характеристик (в частности, распределение шага вдоль радиуса, изменение его диаметра), при которых гидродинамические характеристики (например, коэффициент момента КQ) практически мало зависят от относительной поступи J (скорости судна) в широком диапазоне режимов работы движителя. Это позволяет поддерживать номинальные обороты и эффективно перерабатывать полную мощность главного двигателя на этих оборотах. ГВ же фиксированного шага позволяет эффективно перерабатывать полную мощность при номинальных оборотах только на проектировочном режиме работы и в случае изменения этого режима приводит к перегрузке главного двигателя судна (гидродинамически тяжелый ГВ) или и его недогрузке на указанных оборотах (гидродинамически легкий ГВ).
| название | год | авторы | номер документа |
|---|---|---|---|
| НИЗКООБОРОТНЫЙ ГРЕБНОЙ ВИНТ | 2007 |
|
RU2369520C2 |
| ГРЕБНОЙ ВИНТ КОРАБЕЛЬНЫЙ | 2009 |
|
RU2382715C1 |
| СУДОВАЯ ДВИЖИТЕЛЬНАЯ УСТАНОВКА ТИПА "ПОВОРОТНАЯ КОЛОНКА" | 2003 |
|
RU2248302C1 |
| ЛОПАСТНОЙ ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС | 2007 |
|
RU2362706C2 |
| ВИНТ РЕГУЛИРУЕМОГО ШАГА | 1994 |
|
RU2095278C1 |
| Гребной винт в кольцевой насадке | 2022 |
|
RU2774200C1 |
| СПОСОБ ПРОЕКТИРОВАНИЯ ДВУХРЕЖИМНОГО КОНТРПРОПЕЛЛЕРА В ТРЁХ УСТАНОВОЧНОМ ВАРИАНТЕ И ДВУХРЕЖИМНЫЙ КОНТРПРОПЕЛЛЕР В ТРЁХ УСТАНОВОЧНОМ ВАРИАНТЕ | 2014 |
|
RU2569996C1 |
| Самостабилизирующийся лопастной движитель | 2022 |
|
RU2798298C1 |
| ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС ДВУХВАЛЬНОГО СУДНА | 1994 |
|
RU2089442C1 |
| ПРОПУЛЬСИВНЫЙ КОМПЛЕКС ТОРПЕДЫ, СПОСОБ РАБОТЫ И ВАРИАНТЫ ДВИЖИТЕЛЯ | 2020 |
|
RU2757339C1 |

Изобретение относится к области судостроения, касается вопросов создания гребных винтов. Гребной винт с лопастями имеет ступицу в виде гильзы, в которой размещены комли лопастей, установленных с возможностью поворота каждой лопасти вокруг оси, геометрическая ось которой не совпадает с осью вращения гребного винта и радиально смещена от последней, причем лопасти имеют откидку в сторону, противоположную направлению вращения гребного винта. Геометрическая ось поворота лопастей составляет с осью вала гребного винта угол 0-20°, а угол поворота лопастей Ψ вокруг этой оси составляет в сторону, противоположную вращению гребного винта, не более 20° от конструктивного положения лопасти, соответствующего углу Ψ=0°, а в направлении вращения гребного винта - не более 5°, при этом откидка лопастей выполнена так, что на проекции контура каждой лопасти на плоскость диска гребного винта угол, характеризующий откидку лопастей α, образованный двумя лучами, выходящими из центра гребного винта и проходящими – один - через середины цилиндрических сечений лопастей на относительном радиусе, равном 0,3, а другой - на относительном радиусе - 1,0, составляет не менее 70°. Кроме того, максимальное расстояние от оси гребного винта до оси поворота каждой лопасти составляет не более 20% его радиуса, а радиус кривизны наружной поверхности комлей лопастей, размещенных в гильзе ступицы, составляет 0,7-0,75 радиуса ступицы. Технический результат заключается в повышении тяговых характеристик гребных винтов в широком диапазоне режимов движения судна. 1 з.п. ф-лы, 5 ил.
| US 3565544, 23.02.1971 | |||
| УСТАНОВКА ДЛЯ ОБЕЗЖЕЛЕЗИВАНИЯ ВОДЫ | 1996 |
|
RU2134660C1 |
| Гребной винт | 1989 |
|
SU1761592A2 |
| Гребной винт изменяемого шага | 1960 |
|
SU146201A1 |

