Точное знание размеров органов человеческого тела, недоступных непосредственному измерению, имеет большое значение. Достаточно указать на сердце, для определения размеров которого употребляют специальные приспособления, например, ортодиаграф. Не менее важно знать настоящие размеры инородных тел, попавших в тело человека и животного, например, пуль, осколков снарядов, осколков костей и т. п., а также уметь определять расположение и местонахождение инородных тел в организме, например, как далеко в глубину и в сторону от какого-нибудь определенного органа зашло инородное тело.
Для ответа на все эти вопросы может служить предлагаемое приспособление, предназначенное как для просвечивания, так и для снимков.
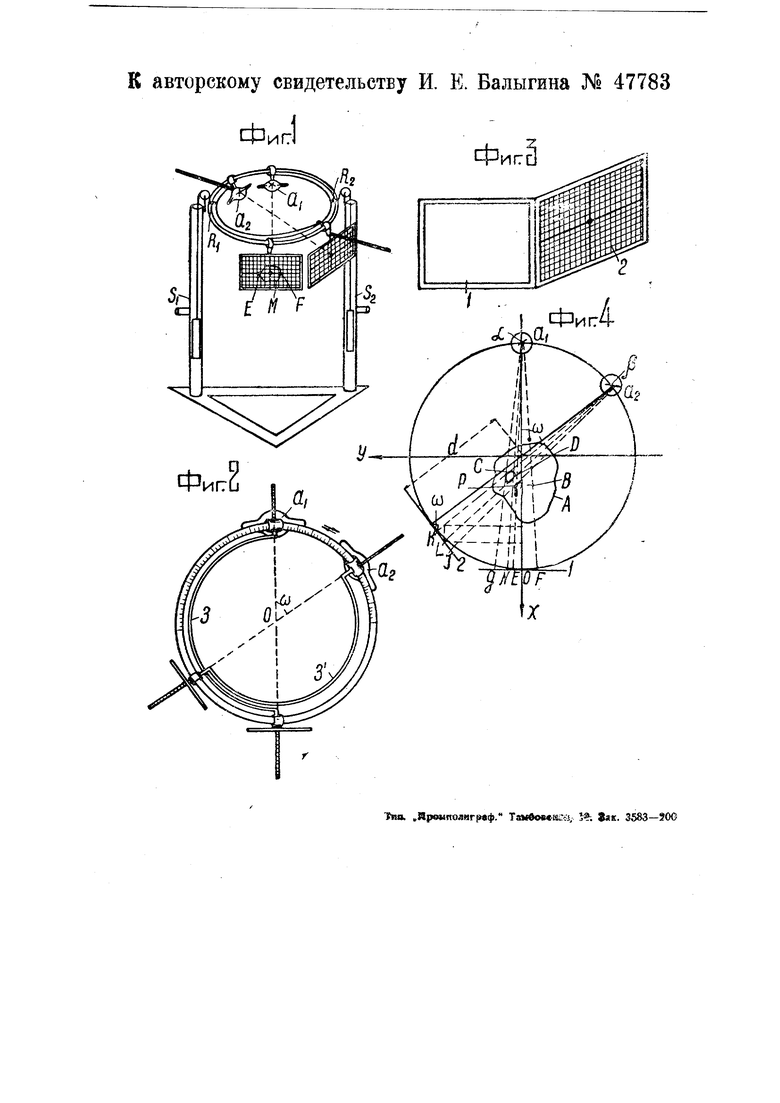
На прилагаемом чертеже фиг. 1 изображает схематически общий вид предлагаемого приспособления; фиг. 2-вид на тороид сверху; фиг. 3-экран с откинутой сеткой; фиг. 4-принципиальную схему хода лучей при исследовании.
Предлагаемое приспособление состоит, в основном, из установленного переместимо в вертикальном направле(46)
НИИ и поворотно в вертикальной плоскости вокруг точек , на стокках /Si, 5, металлического круга (тороида) с нанесенной на нем угловой шкалой, на котором переместимо по окружности установлены две рентгеновских трубки Cj:, «g, каждая из которых жестко связана посредством дугообразного прута 3, 3 с соответственно диаметрально расположенным, также переместимым по окружности тороида, флуоресцирующим экраном 1, 2.
Трубки установлены таким образом, что центральные лучи их пересекаются в 1 еометрическом центре О круга, образуя центральный угол, могущий быть измеренным по нанесенной на тораиде шкале.
Каждый экран 1, 2 снабжен съемной металлической (непрозрачной для лучей) координатной сеткой, в которой центр (начало) координат, отмеченный свинцовым шариком, должен совпадать с центром фокуса трубки (с центральным лучом).
Для просвечивания или снимков на лежачих пациентах необходимо предусмотреть возможность опрокидывания приспособления, например, путем устройства шарнирного сустава в стойках Si, Принцип действия и теория аппарата. Отнесем все рассужде15ия к определенной плоскости, т. е. возьмем точки изображения тел (теней от рентгеновских лучей) на плоскости ху. Центр (начало) координат, относительно которого будем определять действительное залегание инородного тела относи тельно какого-нибудь известного органа, дающего теневую проекцию, поместим в геометрическом центре круга (тороида), где пе есекаются центральные лучи трубок (фиг. 4). Предположим, что для определения положения инородного тела-С в теле человека Л мы приняли, как ориентировочную точку, какую-нибудь известную кость В или какой-нибудь посторонний непроницаемый предмет, помещенныг;снаружи (например, свинцовую горошину). Границы теневых проекций тел В 1-1 С будут, конечно, видны кяк на экране (п,;освечивание), так и нп пленке (снимок). Координаты этих краев теневых проекций нам будут известнь (координатная сетка на экране). Обозначим на экране 1 края проекиии от тела В буквами f и / и от тела С-G к N, а на втором экране 2-края проекции от тела С через /С и Д от тела С-через/. Расстояние трубок Куллиджа от начала координат будет, конечно, известно. Обозначим расстояние от трубки й1, связанной с экраном 1, до начала координат через /г, расстояние же трубки Og, связанной жестко с экраном 2, через Н. Определим сначала точку инородного тела С относительно выбранной системы координат, т. е. закрепим ее. Эта точка, как видно из фиг. 4, получена как бы от п ресечекия двух прямых aJV и pi (ое и р-фокусы анодов трубок 7i и О)Координаты этих точек нам известны. Обозначим их для точки N чепез , а для точки а через х, у. Через эти две точки, как известно из элемент рний аналитической геомгтрии, можно провести прямую, ypjBHeane которой будет: X - «1 .Tke tX/-t Точно так же найдем уравнение прямой, проходящей через точки р, L. Таким образом, в нашем распоряжении будут иметься два уравнения с двумя неизвестными, решив которые относительно хну, мы определим координаты точки D. Координаты точек TV и Z, легко найти: угол ш нам будет и.вестен по соответствующим делениям на круге, по которому перелвещаются обе трубки Куллиджа. Например, координаты точки L будут: x dcosM-{-OLs n o I j/ f sincu - OZ, созш I Здесь Й -расстояние от центра экрана до цен ра координат. Это расстояние будет известно- его прямо можно будет прочитать на и;кале, снабдив таковой аппарат. Координаты точки jS будут: д: Лсо5о) I . . (3) I Совершенно аналогичным образом можно определить точку Р тела В по краям ее проекций на экранах. Ра стояние между двумя точками, как известно, может быть найдено из формулы: (i-x,(yi-y-2} , . ( 4 После того, как в-аимное расположение тел В VI С найдено, на координатную систему можно не обращать внимания. Действительные размеры тел В или С легко нолучагся, если определить две крайние точки, нринпдлежан ие одному и тому же телу, и подставить найденные координаты точек пересечения в формулу (4). Точки те.ча, выходящие за предельные п юскости л:, у, например, точка М на экране на фиг. 1, т. е. точки, расположенные в пространстве относительно выбранной сисгемы координат, можно найти, если решить ту же самую заД1чу-провести прямую через две данные точки, с той лишь разницей, что добавится лищняя коирдинат.а z. Для
этого случая уравнение прямой, как известно, будет:
s - s
а; -Xi
. . (5) x - osi. vz-Л
2;
Точка пересечения двух прямых может быть найдена по тому же правилу, как и в первом случае. Аналогичная формула будет и для, I, лишь добавится лишний член под корнем (г - г;). Проекции на X к у будут такие же. как и в формуле (2) и (3), добавится лишь координата z, которая сразу же может быть определена.
Для облегчения вычислений можно по приведенным формулам построить номограмму, по которой можно было бы сразу определить интересующие размеры. Помимо номограммы, для сблегчения работы предлагаемым приспособлением можно построить механическую модель, устройство которой могло бы быть, например, такое: на круге с диаметром, равным диаметру ториида, по которому движутся трубки Куллиджа, прикренлен пучок тонких проволок, закрепленных в одной точке. Таких переместимых по окружности пучков должно быть два. На этом же круге находятся рамы с координатными сетками, расположенными соответственно экранам
в аппарате, диаметрально описанным пучкам. Работа на этой модели или обработка полученных на приспособлении данных сведется к тому, чтобы по намеченным на экранах или пленках координатам закрепить нити пучка на модели в том же самом положении: точки пересечения проволок дадут размеры инородного тела и его местонахождение относительно ориентировочного тела.
На тороиде может быть помеш,ена н однч трубка, но тогда невозможно будет определить точные разм(фы, например, сердца, для чего требуется произвести снимки из двух положений одновременно.
Предмет изобретения.
Приспособление для определения размеров и положения инородных тел в организме с применением ДВУХ рентгеновских трубок, координатной сетки и технической людели, отличающееся тем, что две рентгеновских трубки установлены подвижно на круге, разбитом на деления, и жестко связаны с экранами по диаметру этого круга, а экраны снабжены координатными сетками, начало коих совпадает с центральными лучами рентгеновских трубок.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для импульсного питания рентгеновских трубок | 1936 |
|
SU48882A1 |
| Способ измерения пористости твердых тел, например керамических изделий | 1958 |
|
SU122333A1 |
| Устройство для импульсного питания рентгеновских трубок | 1935 |
|
SU45361A1 |
| Емкостный экранированный делитель напряжения | 1940 |
|
SU64066A1 |
| Способ стереорентгенограмметрической съемки | 1990 |
|
SU1747032A1 |
| КООРДИНАТНАЯ РАМКА ДЛЯ РЕНТГЕНОТОПОМЕТРИИ | 2001 |
|
RU2183941C1 |
| Рентгенологический растр | 1919 |
|
SU1328A1 |
| УСТРОЙСТВО ДЛЯ ЮСТИРОВКИ РЕНТГЕНОВСКОГО АППАРАТА | 2002 |
|
RU2221488C1 |
| Способ стереорентгенографии | 1980 |
|
SU935077A1 |
| СПОСОБ КАЛИБРОВКИ ВИДЕОГРАММЕТРИЧЕСКИХ СИСТЕМ И КОНТРОЛЬНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2645432C1 |