Изобретение относится к области оптических бесконтактных измерений геометрических параметров формы, положения, движения и деформации объектов в пространстве, в частности к ближней цифровой фотограмметрии и видеограмметрии, и может применяться для прецизионной калибровки видеограмметрических систем в научных исследованиях, машиностроении, строительстве, медицине, экспериментальной аэродинамике и в других областях.
Известны многочисленные оптические способы и устройства бесконтактных измерений геометрических параметров объектов. Наиболее широко известными являются методы фотограмметрии [Лобанов А.Н. Фотограмметрия. - М: Недра, 1984]. Основное назначение фотограмметрии состоит в измерениях геометрических параметров участков поверхности земли по аэроснимкам и снимкам из космоса, т.е. с большого расстояния. Методы ближней фотограмметрии применяются и для бесконтактных измерений геометрических параметров объектов на коротких расстояниях в единицы и десятки метров. В последнее время методы фотограмметрии реализуются с применением цифровых средств регистрации изображений и называются цифровой фотограмметрией или видеограмметрией. Видеограмметрия ближней зоны широко применяется в научных исследованиях, промышленном производстве, строительстве, медицине, в частности в экспериментальной аэродинамике [Патент РФ №2551396, МПК G01С 11/00, 2013].
Известны способы калибровки видеограмметрических систем, при которых в рабочем пространстве измерений (пространстве объекта) задают тем или иным способом множество узловых точек с известными координатами, регистрируют одно или несколько изображений этих точек и находят координаты центров соответствующих точек на полученных изображениях. Затем, сопоставляя массив известных координат с массивом координат точек изображения, составляют математическую регрессию с рабочей характеристикой (1) в качестве функционала. Искомые параметры рабочей характеристики находят, решая задачу математической регрессии методами многомерной минимизации [В.П. Кулеш. Бесконтактные измерения геометрических параметров формы, движения и деформации объектов в экспериментальной аэродинамике // Датчики и системы. - 2004. №3. - С. 22-27].
Наиболее близким техническим решением, выбранным в качестве прототипа, является «Способ калибровки изображений стереофотограмметричечкой системы» [Авт. свид. СССР №1703972 А1, МПК G01С 11/00, 1988], при котором в пространство измерений устанавливают тест-объект с множеством маркеров, хорошо различимых на изображениях, регистрируемых камерой видеограмметрической системы, и координаты которых предварительно измеряют в собственной системе координат с повышенной точностью, превышающей прогнозируемую точность видеограмметрической системы.
Известно также контрольное приспособление для осуществления указанного способа [В.П. Кулеш. Бесконтактные измерения геометрических параметров формы, движения и деформации объектов в экспериментальной аэродинамике // Датчики и системы. - 2004. №3. - С. 22-27], также выбранное в качестве прототипа, включает тест-объект с множеством маркеров, хорошо различимых на изображениях, зарегистрированных камерой видеограмметрической системы, и средство регулирования его положения в рабочем пространстве измерений. Маркеры на тест-объекте могут быть расположены как в одной плоскости, так и нескольких плоскостях или в объеме. Координаты всех маркеров обычно предварительно измеряют с повышенной точностью, превосходящей прогнозируемую точность калибруемой видеограмметрической системы, например, с помощью трехкоординатной измерительной машины (КИМ).
Однако результаты калибровки с помощью известного способа и контрольного приспособления оказываются полученными в системе координат тест-объекта, которая была задана при предварительном измерении координат маркеров, и зависят от положения тест-объекта как при таком измерении, так и при его установке в рабочем пространстве измерений видеограмметрической системы. В то же время многие задачи бесконтактных измерений требуют строгой привязки измерений к заданной рабочей системе координат. Например, измерения геометрических параметров объектов в экспериментальной аэродинамике должны выполняться строго в системе координат, связанной с высокой точностью с положением летательного аппарата по отношению либо к земле, либо к направлению скорости движения или воздушного потока, либо к стенкам рабочей части аэродинамической трубы. При этом требования к погрешности привязки системы координат по угловым параметрам (углам атаки, тангажа и др.) составляют сотые доли градуса. Требования к погрешности привязки по линейным параметрам составляют 0,1 мм. Известные способ и контрольное приспособление такую высокую точность калибровки видеограмметрической системы обеспечить не могут.
Техническим результатом изобретения является повышение точности и достоверности калибровки видеограмметрических систем за счет увеличения точности позиционирования тест-объекта путем привязки его системы координат к измерительной системе координат по шести степеням свободы, а следовательно, точности и достоверности последующих бесконтактных измерений геометрических параметров положения, движения и деформации моделей или элементов конструкции летательных аппаратов в аэродинамических трубах и на экспериментальных стендах.
Технический результат достигается тем, что в способе калибровки видеограмметрических систем, при котором в пространство измерений устанавливают тест-объект с множеством маркеров, координаты которых предварительно измерены в собственной системе координат, и регистрируют изображения маркеров камерой видеограмметрической системы, согласно изобретению в пространстве измерений создают комплекс базовых ориентиров, функционально согласуют его с измерительной системой координат, тест-объект оснащают комплексом ответных реперов, функционально согласуют его с собственной системой координат, а при установке тест-объекта регулируют его положение, сводя базовые ориентиры с ответными реперами по шести степеням свободы.
Указанный технический результат достигается также тем, что в контрольное приспособление для калибровки видеограмметрических систем, содержащее тест-объект и средство регулирования его положения в рабочем пространстве измерений, согласно изобретению в пространстве измерений дополнительно введены комплекс установленных неподвижно базовых узлов ориентации, функционально связанных с измерительной системой координат, комплекс ответных реперов, установленных жестко на тест-объекте и функционально связанных с его собственной системой координат, а также комплекс средств сведения базовых узлов ориентации с ответными реперами, при этом комплекс базовых узлов ориентации содержит вертикальную базовую плоскую поверхность, параллельную координатной плоскости измерительной системы координат, и лазер непрерывного действия, установленный своей оптической осью перпендикулярно упомянутой вертикальной базовой поверхности и выходом в сторону тест-объекта, при этом комплекс ответных реперов включает горизонтальную и вертикальную реперные плоские поверхности, параллельные координатным плоскостям собственной системы координат тест-объекта, и зеркальную мишень, имеющую плоскую отражающую поверхность с круглой маской по диаметру луча лазера, установленную отражающей поверхностью параллельно вертикальной реперной поверхности, а узлы сведения выполнены в виде уровня, установленного на горизонтальную реперную поверхность тест-объекта, измерителя расстояния, установленного между базовой и реперной вертикальными поверхностями, прямого плоского экрана, установленного по ходу лучей света лазера за зеркальной мишенью, и обратного плоского экрана с отверстием по диаметру луча лазера, установленного на выходе лазера центром отверстия на оптической оси и лицевой поверхностью в сторону тест-объекта, при этом средство регулирования положения тест-объекта выполнено в виде механизма с шестью степенями свободы.
Технический эффект в способе и устройстве во всех случаях достигается, благодаря обеспечению возможности строгой привязки собственной системы координат тест-объекта к измерительной системе координат, что приводит к тому, что параметры внешнего ориентирования рабочей характеристики видеограмметрической системы также получаются в измерительной системе координат, и не требуется последующих вычислительных преобразований и коррекций.
Перечень фигур, иллюстрирующих предложенный способ и контрольное приспособление:
На фиг. 1 показана структурная схема устройства, поясняющая способ калибровки видеограмметрических систем.
На фиг. 2 показана схема устройства возможного варианта контрольного приспособления для калибровки видеограмметрических систем.
На фиг. 3 приведена фотография тест-объекта планшетного типа, на котором установлен комплекс ответных реперов.
На схемах условно показаны:
1 - камера видеограмметрической системы;
2 - тест-объект;
3 - множество маркеров на тест-объекте, хорошо различимых на получаемых с камеры рабочих изображениях;
4 - рабочее изображение маркеров;
5 - средство регулирования положения тест-объекта по шести степеням свободы;
6 - базовый узел ориентации;
7 - ответный репер;
8 - средство сведения базового узла ориентации с ответным репером;
9 - вертикальная базовая плоская поверхность;
10 - лазер непрерывного действия;
11 - горизонтальная реперная плоская поверхность;
12 - вертикальная реперная плоская поверхность;
13 - зеркальная мишень;
14 - уровень;
15 - измеритель расстояния;
16 - прямой экран;
17 - обратный экран с отверстием.
Суть метода видеограмметрии заключается в определении трех координат x, y, z точки объекта в пространстве по двум координатам u, v образа этой точки на цифровом изображении, построенном по законам центральной проекции. В общей постановке эта задача восстановления координат недоопределена, т.е. для трех неизвестных существует только два уравнения. Одним из путей разрешения неопределенности задачи восстановления искомых координат точки в пространстве в методах видеограмметрии, является использование априорной информации, полученной из других источников. Этот способ чаще всего сводится к методу маркерных точек, при котором на поверхность исследуемого объекта в заданных точках наносятся специальные маркеры, хорошо различимые на получаемых изображениях [Тюфлин Ю.С., Степаньянц Д.Г., Князь В.А., Желтов С.Ю. Предвычисление точности определения координат точек объекта в ближней фотограмметрии // Геодезия и картография. - 2004. №11. - С. 29-32]. Часто априорную информацию приводят к тому, что координата z всех маркерных точек известна. При этом рабочая характеристика измерительной системы принимает вид:

где: u0, v0 - координаты центра изображения - точки пересечения оптической оси приемного объектива с плоскостью чувствительной матрицы цифровой камеры (выражаются в пикселях);
w0 - задний отрезок приемного объектива (в пикселях);
x0, y0, z0 - координаты центра приемного объектива (центра проекции) в системе координат модели (в метрических единицах);
Mij - элементы матрицы вращения - направляющие косинусы. Элементы матрицы вращения являются функциями углов ориентации α, β, γ системы координат камеры в системе координат объекта.
В рабочую характеристику входят ряд коэффициентов - параметров. Традиционно принято разделять параметры рабочей характеристики разделять на две группы: параметры внутреннего и внешнего ориентирования. В таблице 1 приведен перечень основных параметров, характеризующих измерительную (видеограмметрическую) систему. Формально к параметрам внутреннего ориентирования относится один или более коэффициентов дисторсии объектива.
Для применений методом видеограмметрии необходимо определить численные значения указанных по меньшей мере 10 параметров рабочей характеристики (1), которые с необходимой точностью могут быть найдены только в процессе калибровки измерительной системы.

При калибровке в рабочем пространстве измерений (пространстве объекта) необходимо тем или иным способом задать множество узловых точек с известными координатами x*, y*, z*, зарегистрировать изображение этих точек камерой видеограмметрической системы, измерить координаты u*, v* центров соответствующих точек на полученных изображениях и затем, сопоставляя массив {x*, y*, z*} с массивом {u*, v*}, составить математическую регрессию с рабочей характеристикой (1) в качестве функционала. Решением полученной регрессии методами многомерной минимизации расхождений (обычно методом наименьших квадратов) находят искомые параметры рабочей характеристики.
Множество узловых точек обычно задают с помощью тест-объекта, имеющего жесткую недеформируемую основу, на которой размещено множество маркеров, хорошо различимых на изображениях, получаемых с помощью камеры видеограмметрической системы. Координаты маркеров в собственной системе координат тест-объекта предварительно измеряют инструментальными средствами с точностью, превышающей прогнозируемую точность калибруемой видеограмметрической системы.
Для обеспечения необходимой точности калибровки видеограмметрических систем, предназначенных для бесконтактных измерений особенно крупногабаритных объектов и в условиях стесненного рабочего пространства или ограниченного оптического доступа, характерных, например, для аэродинамического эксперимента в аэродинамических трубах и летных испытаний, предъявляются высокие требования к точности совмещения собственной системы координат тест-объекта с измерительной системой координат, связанной с характерными особенностями объекта исследований или экспериментальной установки.
Предложенный способ калибровки поясняется схемой возможного контрольного приспособления, изображенной на фиг. 1. В рабочем пространстве измерений перед камерой 1 калибруемой видеограмметрической системы устанавливают тест-объект 2 с множеством маркеров 3. В частности, это может быть тест-объект планшетного типа, на котором маркеры расположены в одной плоскости. Изображение 4 множества маркеров регистрируют в заданный момент времени с помощью камеры. Положение тест-объекта в пространстве регулируют с помощью механизма 5 с шестью степенями свободы. Для точного ориентирования тест-объекта в пространстве измерений устанавливают набор неподвижных базовых узлов ориентации 6, которые должны быть функционально связаны с измерительной системой координат по шести степеням свободы: трем линейным и трем угловым. Соответственно на тест-объекте необходимо установить соответствующий набор ответных реперов 7, жестко связанных с собственной системой координат тест-объекта также по шести степеням свободы. В процессе ориентирования следует регулировать механизмом 5 и одновременно контролировать с помощью средств сведения 8 положение тест-объекта до максимально точного совмещения по всем степеням свободы.
Самым очевидным является решение, при котором комплекс базовых узлов ориентации можно задать в виде трех взаимно ортогональных базовых плоских поверхностей - одной горизонтальной и двух вертикальных, - установленных неподвижно вблизи пространства измерений. Также и комплекс ответных реперов можно задать в виде трех взаимно ортогональных реперных плоских поверхностей, образованных на тест-объекте. Линейные компоненты ориентации при этом можно хорошо контролировать и выставлять с помощью измерителей расстояния 15, например, штангенциркулей, измерительных линеек, рулеток, оптических и лазерных дальномеров. Угловые положения тест-объекта относительно двух горизонтальных координатных осей можно контролировать с помощью уровней 14, установленных на горизонтальную реперную поверхность тест-объекта. Однако угловую ориентацию относительно вертикальной оси контролировать очень сложно.
На фиг. 2 приведена схема возможного варианта контрольного приспособления с тест-объектом планшетного типа. На схеме координатная плоскость Оху совмещена с плоскостью расположения маркеров, а ось Оу направлена вертикально вверх. В этом устройстве базовые ориентиры заданы следующим образом. Направление координатной оси Оу совмещено с вектором силы притяжения земли, вертикальная базовая плоская поверхность 9 ориентирована параллельно координатной плоскости Оху и координатная ось Oz лучом лазера 10.
Комплекс ответных реперов включает горизонтальную плоскую поверхность 11, вертикальную поверхность 12, параллельную плоскости расположения маркеров, и зеркальную мишень 13, имеющую плоскую отражающую поверхность с круглой маской равного или несколько меньшего (0,9-0,95) диаметра, чем диаметр луча лазера, установленную отражающей поверхностью параллельно вертикальной реперной поверхности. Отражающая поверхность мишени может иметь либо зеркальную, полностью отражающую, либо полупрозрачную поверхность. В первом случае упомянутая маска может представлять собой круглое прозрачное отверстие в зеркальной поверхности. Во втором случае маска должна быть непрозрачной и размещаться за полупрозрачной поверхностью. При ориентировании тест-объекта в пространстве измерений его устанавливают так, чтобы луч лазера падал нормально на центр зеркальной мишени 13. Контроль точности совмещения осуществляется по симметричности ореола вокруг тени на экране 16.
Угловые положения тест-объекта относительно осей Ох к Оу контролируются по положению зайчика, отраженного мишенью лазерного луча, на обратном экране 17. Диаметр отверстия в экране 17 должен быть равным или немного большим (1,1-1,2) диаметра луча лазера. При настройке с помощью механизма 5 следует добиваться, чтобы зайчик как можно более точно возвращался в отверстие экрана 17. Контроль точности совмещения осуществляется по симметричности ореола отраженного луча вокруг отверстия на экране 17. Погрешность настройки углового положения при этом зависит от расстояния от зеркальной мишени до обратного экрана и точности совмещения зайчика с отверстием в экране.
Практика показывает, что если при контроле положения зайчика на экранах применять метод «солнечного затмения», при котором добиваются равномерного распределения ореола зайчика света вокруг круглой тени от маски на экране, то при диаметре луча лазера 2 мм погрешность совмещения его с отверстием не превышает ±0,1 мм. При расстоянии между зеркальной мишенью и экраном 1 м, чувствительность настройки двух этих углов составит около 0,5⋅10-4≈0,003°≈17". Контроль углового положения относительно координатной оси Oz осуществляется с помощью уровня 14, чувствительность которого много выше. Например, уровень брусковый длиной 250 мм имеет чувствительность 0,02 мм/м=0,2⋅10-4≈7". Эта точность сведения угловых параметров ориентирования вполне удовлетворяет требованиям аэродинамического эксперимента.
Линейные положения тест-объекта по координатным осям Ох и Оу контролируются по степени перекрытия луча лазера круглой маской зеркальной мишени. Применяя метод «солнечного затмения» в этом случае можно обеспечить линейное сведение по координатам х и у с погрешностью 0,1 мм. Погрешность сведения по координате z определяется инструментальной погрешностью измерителя расстояния 15, которая для инструмента с нониусом также может составлять величину, порядка ±0,1 мм. Эта точность сведения линейных параметров ориентирования также вполне удовлетворяет требованиям аэродинамического эксперимента.
При известном способе калибровки точность сведения линейных параметров, как правило, не превышает ±0,5 мм, а угловых вокруг вертикальной оси - 1⋅10-3≈3'. Таким образом, эффект изобретения состоит в повышении точности калибровки в 5 и более раз. Достоверность возрастает вследствие того, что по всем шести степеням свободы обеспечивается объективный инструментальный контроль положения тест-объекта.
Часто требуемый объем пространства измерений видеограмметрической системы превышает пространство, которое задает тест-объект. В этом случае калибровка предполагает многократное перемещение тест-объекта в несколько положений, в каждом из которых измеряют параметры положения тест-объекта и регистрируют соответствующее изображение маркеров. Тест-объект обычно перемещают параллельно самому себе, и параметры положения измеряют с помощью измерителей расстояний 15. При обработке результатов калибровки рассчитывают координаты маркеров во всех положениях тест-объекта с учетом измеренных параметров положения, измеряют координаты образов маркеров на соответствующих изображениях и каждую из двух групп данных объединяют в общий массив, который включают в регрессию. При этом технический эффект изобретения многократно увеличивается.
Предложенный способ калибровки и контрольное приспособление для его осуществления были опробованы для решения задач экспериментальной аэродинамики. Результаты испытаний подтвердили повышение точности и достоверности калибровки видеограмметрических систем за счет увеличения точности позиционирования тест-объекта путем привязки его системы координат к измерительной системе координат по шести степеням свободы. На фиг. 3 приведен вид тест-объекта планшетного типа, на котором установлен комплекс ответных реперов, включающий горизонтальную плоскую поверхность 11, вертикальную плоскую поверхность 12, параллельную плоскости расположения множества маркеров 3, и зеркальную мишень 13. На фотографии видны также винты механизма 5 регулирования положения тест-объекта. Комплекс установленных неподвижно базовых узлов ориентации на фотографии не показан. Множество маркеров содержит 80 маркеров, расположенных в одной плоскости в узлах прямоугольной сетки 8×10 с шагом 100 мм. Диаметр каждого маркера 3 мм.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ измерений координат точек объекта в пространстве | 2020 |
|
RU2749654C1 |
| Способ измерения пространственных координат точек объекта с высокой продольной жёсткостью | 2024 |
|
RU2835117C1 |
| СПОСОБ БЕСКОНТАКТНЫХ ИЗМЕРЕНИЙ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТА В ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2551396C1 |
| СПОСОБ ГРАДУИРОВКИ РАСПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО РАЗРЕШЕНИЯ УСТРОЙСТВА ПОЛУЧЕНИЯ ЦИФРОВОГО РЕНТГЕНОВСКОГО ИЗОБРАЖЕНИЯ | 2024 |
|
RU2826349C1 |
| Способ определения собственных координат по трем визирным светоизлучающим маркерам | 2024 |
|
RU2838123C1 |
| Устройство для измерения геометрических параметров движения и деформации вращающихся объектов | 2023 |
|
RU2808386C1 |
| СПОСОБ КАЛИБРОВКИ ВИДЕОГРАММЕТРИЧЕСКОЙ СИСТЕМЫ С ПОМОЩЬЮ МАЯТНИКА | 2023 |
|
RU2823551C1 |
| Способ взаимной калибровки видеокамеры и устройства многолучевого лазерного подсвета | 2024 |
|
RU2840117C1 |
| СПОСОБ КАЛИБРОВКИ ОПТИЧЕСКОЙ СИСТЕМЫ | 2008 |
|
RU2381474C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМНОГО ПОЛОЖЕНИЯ И УПРАВЛЕНИЯ ДЛЯ ГРУППЫ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ | 2016 |
|
RU2629758C1 |


Изобретение относится к области оптических бесконтактных измерений геометрических параметров формы, положения, движения и деформации объектов в пространстве, в частности к ближней цифровой фотограмметрии и видеограмметрии, и может применяться для прецизионной калибровки видеограмметрических систем в научных исследованиях, машиностроении, строительстве, медицине, экспериментальной аэродинамике и в других областях. Заявленная группа изобретений включает способ калибровки видеограмметрических систем и контрольное приспособление для калибровки видеограмметрических систем. Причем способ калибровки видеограмметрических систем, при котором в пространство измерений устанавливают тест-объект с множеством маркеров, хорошо различимых на изображениях, регистрируемых камерой видеограмметрической системы, и координаты которых предварительно измеряют в собственной системе координат с повышенной точностью, превышающей прогнозируемую точность видеограмметрической системы, при этом в пространстве измерений создают комплекс базовых ориентиров, функционально согласуют его с измерительной системой координат, тест-объект оснащают комплексом ответных реперов, функционально согласуют его с собственной системой координат, а при установке тест-объекта регулируют его положение, сводя базовые ориентиры с ответными реперами, по шести степеням свободы. Технический результат заключается в повышении точности и достоверности калибровки видеограмметрических систем за счет увеличения точности позиционирования тест-объекта путем привязки его системы координат к измерительной системе координат по шести степеням свободы, а следовательно, точности и достоверности последующих бесконтактных измерений геометрических параметров положения, движения и деформации моделей или элементов конструкции летательных аппаратов в аэродинамических трубах и на экспериментальных стендах. 2 н.п. ф-лы, 3 ил.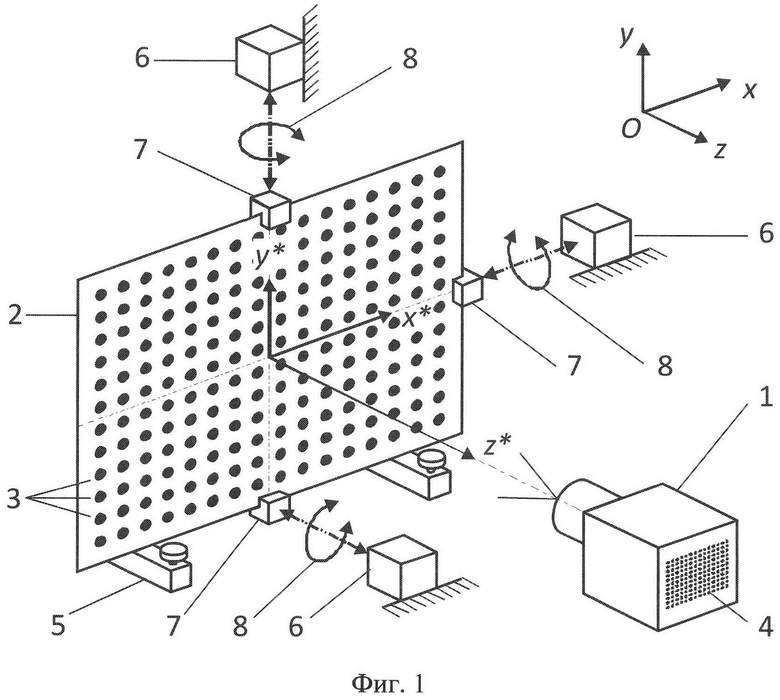
1. Способ калибровки видеограмметрических систем, при котором в пространство измерений устанавливают тест-объект с множеством маркеров, хорошо различимых на изображениях, регистрируемых камерой видеограмметрической системы, и координаты которых предварительно измеряют в собственной системе координат с повышенной точностью, превышающей прогнозируемую точность видеограмметрической системы, отличающийся тем, что в пространстве измерений создают комплекс базовых ориентиров, функционально согласуют его с измерительной системой координат, тест-объект оснащают комплексом ответных реперов, функционально согласуют его с собственной системой координат, а при установке тест-объекта регулируют его положение, сводя базовые ориентиры с ответными реперами, по шести степеням свободы.
2. Контрольное приспособление для калибровки видеограмметрических систем, содержащее тест-объект и средство регулирования его положения в рабочем пространстве измерений, отличающееся тем, что в пространстве измерений дополнительно введены комплекс установленных неподвижно базовых узлов ориентации, функционально связанных с измерительной системой координат, комплекс ответных реперов, установленных жестко на тест-объекте и функционально связанных с его собственной системой координат, а также комплекс средств сведения базовых узлов ориентации с ответными реперами, при этом комплекс базовых узлов ориентации содержит вертикальную базовую плоскую поверхность, параллельную координатной плоскости измерительной системы координат, и лазер непрерывного действия, установленный своей оптической осью перпендикулярно упомянутой вертикальной базовой поверхности и выходом в сторону тест-объекта, при этом комплекс ответных реперов включает горизонтальную и вертикальную реперные плоские поверхности, параллельные координатным плоскостям собственной системы координат тест-объекта, и зеркальную мишень, имеющую плоскую отражающую поверхность с круглой маской по диаметру луча лазера, установленную отражающей поверхностью параллельно вертикальной реперной поверхности, а узлы сведения выполнены в виде уровня, установленного на горизонтальную реперную поверхность тест-объекта, измерителя расстояния, установленного между базовой и реперной вертикальными поверхностями, прямого плоского экрана, установленного по ходу лучей света лазера за зеркальной мишенью, и обратного плоского экрана с отверстием по диаметру луча лазера, установленного на выходе лазера центром отверстия на оптической оси и лицевой поверхностью в сторону тест-объекта, при этом средство регулирования положения тест-объекта выполнено в виде механизма с шестью степенями свободы.
| Способ калибровки изображений стереофотограмметрической системы | 1988 |
|
SU1703972A1 |
| СПОСОБ БЕСКОНТАКТНЫХ ИЗМЕРЕНИЙ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТА В ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2551396C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТОЧЕК И ОРИЕНТАЦИИ УЧАСТКОВ ПОВЕРХНОСТИ ТЕЛА СЛОЖНОЙ ФОРМЫ | 1999 |
|
RU2162591C1 |
| US 7154613 B2, 26.12.2006. | |||

