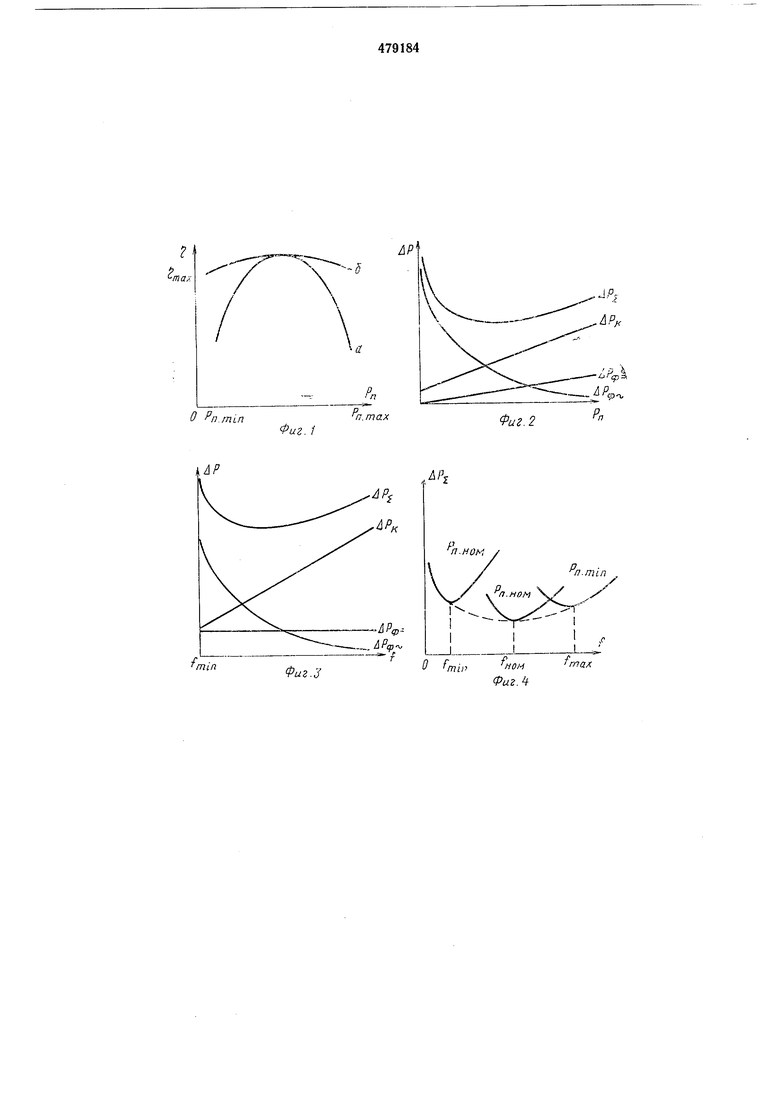
содержит экстремзМ, совпадающий с экстремумом функции (Pn} на фиг. 1.
Зависимость составляющих суммарных потерь в регуляторе в функции частоты f переключения ключа при фиксированной мощности представлена на фиг. 3.
Мощность потерь в ключе пропорциональна частоте переключения, которая определяет время нахождения транзистора в активном режиме. Мощность потерь в фильтре от постоянной -составляющей тока АРф не зависит от частоты переключения, а определяется только мощностью в нагрузке и омическим сопротивлением обмотки дросселя. Поэтому на графике эта составляющая мощности потерь характеризуется прямой, параллельной оси частот. Мощность потерь в фильтре от переменной составляющей тока с увеличением частоты снижается. Поэтому суммарные потери мощности А PS при фиксированном значении потребляемой мощности изменяются как показано на фиг. 3.
Семейство кривых ), полученных при различных значениях потребляемой мощности на основе анализа составляющих потерь (фиг. 2 и фиг. 3) и представленных иа фиг. 4, показывает, что с увеличением потребляемой мощности экстремум функции APs - Fr (f) сдвигается в область более низких частот переключения ключа широтио-импульсного регулятора. Поэтому, если воспользоваться известными способами питания нагрузки и оставить частоту неизменной или увеличивать ее по мере возрастания потребляемой мощности, то регулятор, а следовательно, и вся система электропитания, будет работать с повышенными потерями мощности, т. е. с пониженным к. п. д.
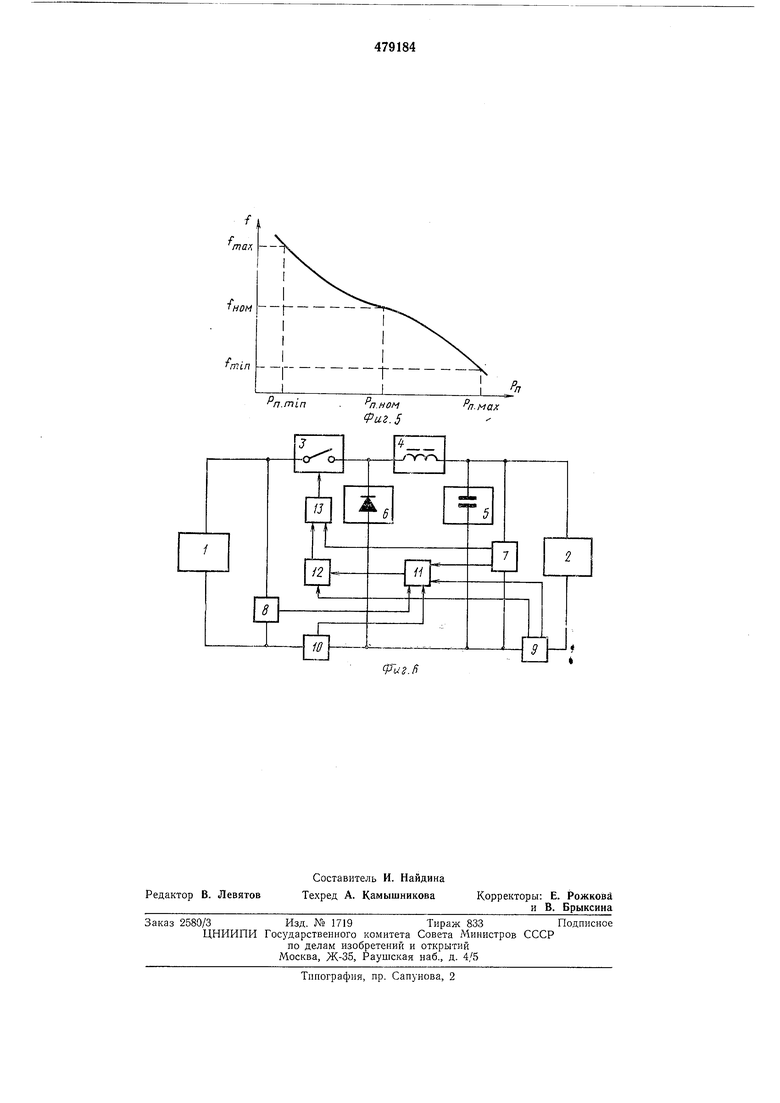
Для обеспечения работы системы с минимальными потерями с ростом потребляемой мощности необходимо уменьшить частоту переключения ключа до такого значения, которое соответствует экстремуму функции А PS Fz(f) при новом более высоком значении потребляемой мощности. График зависимости (Рп) представлен на фиг. 5.
Таким образом, изменяя частоту переключения щиротно-импульсного регулятора, обеспечивающего постоянство напряжения на нагрузке путем изменения скважности импульсов тока, можно обеспечить максимум к.п.д. системы электропитания на всем диапазоне изменеиия потребляемой мощности.
График б функции (Р„) в указанном случае, представленный на фиг. 1, показывает, что при неравномерном графике нагрузки, т. е.
когда потребляемая мощность колеблется от РП min до РП max. уменьшение частоты по мере увеличения нагрузки приводит к более нологому экстремуму без снижения максимального 5 значения к.п.д. системы.
Способ питания неравномерной нагрузки можно реализовать, например, с помощью устройства представленного на фиг. 6. Здесь химический источник I ограниченной мощности
0 подключен к нагрузке 2 через широтно-имиульсный регулятор напряжения, состоящий из блока ключей 3, дросселя-фильтра 4, блока конденсаторов 5, блока вентилей 6, датчика выходного напряжения 7, датчика входного
5 напряжения 8, датчика тока нагрузки 9, датчика тока источника 10, датчика к.п.д. 11, экстремального регулятора 12 и щиротно-импульсного модулятора 13. Регулирование напряжения (широтно-имЭ пульсное) осуществляется через широтно-импульсный модулятор сигналами с выхода датчика напряжения 7. По мере изменения тока нагрузки датчиком 9 производится измерение его величины и знака приращения.
5 Первый из полученных сигналов подводится к датчику к.п.д. 11, подключенному к выходам датчиков 7, 8, 10, а второй подается на один из входов экстремального регулятора 12. Последний переключается на изменение частоты в направлении, противоположном направлению изменения тока нагрузки. Поскольку второй вход экстремального регулятора 12 подключен к выходу датчика к.п.д. 11, изменение частоты производится до момента достижения максимального значения к.п.д., после чего регулятор 12 выключается, а его цепями величина частоты фиксируется и остается неизменной до очередного изменения тока нагрузки.
Предмет изобретения
Способ питания нагрузки от химического источника тока с широтно-импульсным регулированиел напряжения, отличающийся тем, что, с целью повышения к.п.д. системы электропитания, определягот направление изменения потребляемой мощности, измеряют к.н.д. системы и изменяют частоту широтноимпульсного регулирования напряжения в направлении, противоположном направлению изменения потребляемой мощности до момента достижения максимума к.п.д. системы, после чего частоту фиксируют и нитают нагрузку на
этой частоте до момента изменения потребляемой мощности.
Фиг. 1
И/
ПИП
Фиг.З
п.тах
Фиг.2
.
р л. ном
n.min
mil
та/;
ном Фuz.
1
п.mm
РП.ИОХ
Фаг. 5
№г./
| название | год | авторы | номер документа |
|---|---|---|---|
| Экстремальный регулятор мощности | 1985 |
|
SU1251048A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ МОЩНОСТИ | 1999 |
|
RU2164007C1 |
| ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР МОЩНОСТИ | 2001 |
|
RU2210101C2 |
| Способ экстремального регулирования мощности, потребляемой от источника питания постоянного тока | 1990 |
|
SU1746371A1 |
| Экстремальный регулятор мощности, потребляемой от источника постоянного тока | 1990 |
|
SU1749893A1 |
| Экстремальный регулятор мощности,потребляемой от источника питания постоянного тока | 1985 |
|
SU1309015A1 |
| КОРРЕКТОР КОЭФФИЦИЕНТА МОЩНОСТИ | 2014 |
|
RU2560103C1 |
| Устройство для экстремального отбора электрической энергии от солнечной батареи | 2023 |
|
RU2813728C1 |
| ОДНОФАЗНЫЙ ПОЛУМОСТОВОЙ ТРАНЗИСТОРНЫЙ ИНВЕРТОР | 2011 |
|
RU2470451C1 |
| Стабилизированный источник вторичного электропитания | 1982 |
|
SU1049876A1 |