1
Изобретение относится к npHeopocTpoe- нию и м-ожет быть использовано при необ ходимости отспеживания положения какоголибо объекта путем измерения его контура и введения полученных данных в еледящую систему.
Известны способы автоматического отслеживания за положением объекта, основанные на воспроизведении входных сигналов . выходными сигналами при помощи цепи
обратной связи и на определении величины смещения отслеживаемого объекта относи-, тельно; - следящего и преобразовывающего элемента с последующей компенсацией величины рассогласования.
Однако при использовании известных способов слежения и при их реализации в конкретной аппаратуре диапазон слежения оказывается недостаточно щироким, а точность отслеживания неудовлетворитель- ной, что связано с накоплением ощибок за выбранный промежуток времени.Уменьшить количество ошибок можно лишь сузив диапазон, слежения, например уменьшив расстоя-
IV
1ие между объектом слежения и пре образ ователем. Но в этом случае может возникнуть погрешкость за счет аэростатической упругости воздушного слоя. Для уменьшения же последнего необходимо уменьшить площадь преобразоватеш, что также приводит к накоплгнию ошибок.
Uejib изобретения - расширение диапа- зона слежения за положением объекта и одновременно повышение точности слежения.
Для этого по предлагаемому способу в процессе реализации слежения осущест вляют непрерывное воспроизведение первоначальных выходных С1п налов совмест но с накапливающейся ошибкой, после чего эту ошибку выделяют и производят ее сум- я poвaниe с полным первоначальным сигналом, при этом оптимальный интервал слежения выбирают из условия максимально допустимой ошибки, отслеживание которой осушествлшот путем непрерывного переноса втор1гчных результатов в область пер вичных.
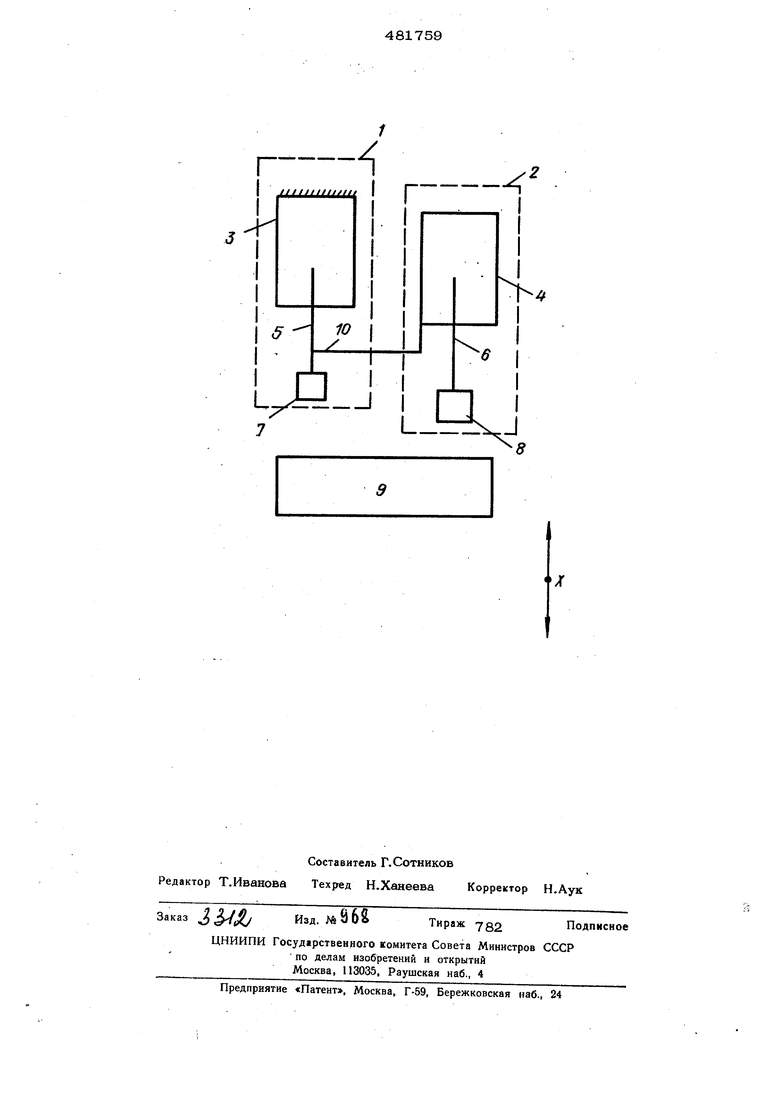
. На чертел е изображено устройство, реаштзуюшее предлагаемый способ.
Следящие узлы 1 и 2 состоят из механизмов обратной связи 3 и 4. Каждый из механизмов имеет шток 5 и 6, на котором установлен свой преобразователь (7 и 8). Отслеживание ведется за объектом
9.
Принимают узел 1 за основной.
Тогда окажется, что pCHOBHOfP узел связан со вспомогательным узлом 2 кронштейном 10. Узел 2 перемещается вместе со што ком 5 и одновременно происходит перемещение преобразователя 8. В начальный :мамент работы шток 6 может быть вьшви нут относительно объекта на некоторое расстояние, что позволяет ему переме-
(Щаться как в сторону объекта, так и в
противоположную сторону. ; В процессе движения объекта 9 он получает.;, непроизвольные хаотические перемещения по вертикали, т.е.. в плоскооти, параллельной плоскости перемещения :преобразователей 7 и 8, Вследствии этого изменяется и расстояние между преобразователями и объектом. Один из узлов, нагнример вспомогательный узел 2, имеет
более высокое быстродействие, чем узел 1, т.е. он обладает меньшей инерционность ;вследствии чего первоначальное начнет
.перемешаться в сторону объекта шток 6, Стремящийся поддерживать зазор между
Поверхностью объекта 9 и преобразовате лем 8 постоянным. При этом узел 2 расходует свой запас энергии. Далее начинает перемещаться шток 5 с преобразователем 7, I который восстанавливает зазор ; между объектом 9 и этим преобразователем. Но в связи с тем, что шток 5
;жестко связан через кронштейн 10 с ме .ханизмом 4 последний также двинется в
; сторону объекта 9 со скоростью движения штока 5,. что, в свою очередь, вызовет резкое увеличение скорости перемещения . преобразователя 8. И тогда его скорость
; окажется выше скорости движения объекта 9 в вертикальном направлении. Последнее вызовет уменьшение зазора, и шток 6 начнет перемещаться в сторону, противопо;1ожную объекту 9. Узел 2 вновь приобре- тает запас энергии, что и позволит ему
.оиеративно определять и компенсировать ошибку слелсения основного узла 1«
Таким образом, оказывается возмож ным не только расширить диапазон слеже Ния и повысить точность самого процесса ; слежения, но и уменьшить требования к стабильности питания устройства. Наприме при изменении питания штоки получат перемещение только в области ошибки ( она заведомо учтена и определе- на). Но так как диапазон узла 2 является меньшим, то и шток 6 переместится на меньшую величину,- а шток 5 - на большую При этом шток 5 переместит на эту величину и механизм 4 с преобразователем 8, что, в свою очередь, вызовет перемещениештока 6 с преобразователем 8 в противо положную сторону. При этом количество следяших узлов, соединенных подобным образом, может быть во много pcia увеличено практически, как это можно было видеть, без накопления ошибки, которая в известных случаях оказалась бы пропорцинальна или кратна количеству используемых- узлов.
Предмет изобретения
Способ автоматич еского слежения за положением объекта путем измерения его контура, основанный на воспроизведении посредством обратной связи входных сигналов выходными и на определении величины смешения объекта относительно следящего и преобразовывающего элемента с последующей компенсацией рассогласования отличающийся тем, что, с целью расширения диапазона и повышения точност слежения, в процессе реализации последнего осуществляют непрерывное воспрои.зведение первоначальных выход)1ых сигтлов совместно с накапливающейся ошибкой, после чего эту ошибку вьщеляют и производят ее суммирование с полным первоначальным сщ-налом, при этом, опти-. мальный интервал слежения выбирают из условия максимально допустимой ошибки, отслеживание которой осуществляют пу- тем непрерывного пе рсгиоса вт-оричпьтх PG зультатов в облс1Сть первггчны-х.
/
Г
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматическое устройство для контроля линейных размеров | 1976 |
|
SU589544A1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ | 1973 |
|
SU387410A1 |
| СПОСОБ ИЗМЕРЕНИЯ И РЕГУЛИРОВАНИЯ НЕСООСНОСТИ | 2014 |
|
RU2605785C2 |
| Пневматическое устройство для контроля положения кромки ленточных материалов | 1990 |
|
SU1747889A1 |
| СПОСОБ ИЗМЕРЕНИЯ И РЕГУЛИРОВАНИЯ НЕСООСНОСТИ | 2017 |
|
RU2678899C2 |
| Устройство для измерения линейных размеров | 1990 |
|
SU1768968A1 |
| Оптическое воспроизводящее устройство | 1986 |
|
SU1352528A1 |
| Устройство для считывания графической информации | 1982 |
|
SU1084835A1 |
| Следящий привод | 1976 |
|
SU636423A1 |
| ПРИВОД ПЕРЕМЕЩЕНИЯ | 1993 |
|
RU2072545C1 |
r.
L.-rr
