Обычно при изготовлении индукционных реле для магнитных систем реле применяются индукционные (чаще тангенциальные) системы, применяемые также и для счетчиков. Это диктуется соображениями стандартизации, так как выгодно применять стандартные части массового производства счетчиков для серийного производства реле. Такова практика многих американских и европейских фирм.
Как на одну из типичных индукционных систем счетчиков, применяемую для реле, можно указать на магнитную систему реле типа ИТ завода ХЭМЗ. Однако подобная стандартизация вызвана скорее коммерческими, нежели качественными соображениями.
Как указывает автор, магнитные системы счетчиков, обладая параметрами, удовлетворительными для счетчиков, неудовлетворительно разрешают многие важные параметры реле.
Причиной этого являются органические противоречия в режимах работы счетчиков и реле и в требованиях, предъявляемых к их магнитным системам.
Главное противоречие относится к режимам работы. В то время, как счетчик нормально работает при постоянном напряу сении и номинальном (или меньшем) токе, индукционные реле с токовыми магнитными системами имеют нормальные режимы при многократных аварийных токах и должны обеспечивать надежное действие в этих критических для установок режимах. В этих условиях ампервитки и поток сериесных катушек достигают больших значений, вызывающих (кроме термических) опасные механические явления в реле. Таковым является дребезжание диска при бвльщих токах вследствие того, что токи сериесных катушек (расположенных обычно на нижней системе под диском) образуют переменные электродинамические усилия с токами, индуктированными в дисках. Это дребезжание опасно для реле во многих отношениях: биение диска в узком зазоре вызывает прикосновение его к полюсам при больших токах, т. е. к задержке или отказу в действии реле; дребезжание осей в подшипниках увеличивает трение осей, а также вызывает ложные механические самоходы диска; при жестких подшипниках это дребезжание портит оси и подпятники. Меры борьбы с дребезжанием диска обычно идут по пути ограничения гарантированного для реле тока короткого замыкания (например до 100ft) и применения вырезов в сериесной магнитной системе, для ограничения в ней потока посредством насыщения. Очевидно, что эти меры являются паллиативными, так как они с другой стороны
ограничивают применение реле и уменьшают чувствительность при больших токах.
Величина вращающего момента в счетчиках определяется минимальными режимами, когда при малом токе (0,5- 1 % от номинального) момент должен преодолеть трение и самоход от напряжения. Величина момента при этом режиме трогания счетчика весьма мала.
В противоположность этому в реле в режиме трогания требуется момент, не только достаточный для преодоления трения и самоходов, но и для преодоления момента арретирующей пружинки. Последняя имеет момент, достаточный для возврата диска в начальное положение, т. е. должна преодолевать не только трение, но и прилипание контактов (неизбежное в процессе замыкания ими тока и искрообразования). По этим причинам величина вращающего момента в режимах трогания в реле во много раз превышает величину момента троганий (и номинального момента) для счетчиков.
Также ясно, что при одинаковых магнитных системах в реле потребуется поэтому применить обмотки с большим количеством ампервитков, чем для счетчика, что увеличит потребляемую мощность обмоток реле. С другой стороны, «ели отказаться от ухудшения этого параметра, то для получения увели енного момента в реле потребуется применить магнитную систему с максимальным моментом обеспечиваемым ее конструкцией и большими размерами.
Вопрос о потребляемой мощности является маловажным для обмоток счетчика, так как эта мощность составляет ничтожный процент номинальной мощности счетчиков. Для реле, включаемых на измерительные трансформаторы, вопрос стоит совершенно иначе, так как большая.потребляемая мощность приводит к значительным ошибкам измерительных трансформаторов, т, е. к ухудшению чувствительности или сеяектив«ости защиты. Особое значение это имеет для реле, включаемых на втулочные трансформаторы ,тока и напряжения -(например, направленные, дистанционные и другие реле), мощность которых весьма ограничена. В то же время ясно.
что если применять для индукционных реле магнитную систему счетчиков, то потребуется увеличить ампервитки, т. е. потребляемую мощность обмоток. При этом получается ухудшение термической устойчивости сериесных обмото, так как токовые системы счетчиков очень тесны (предназначены лишь для нескольких витков) и вынуждают уменьшать сечение проволоки при увеличении числа витков.
Самоходы от тока и напряжения не являются серьезной проблемой для счетчиков: самоход от напряжения легко компенсируется для постоянного напряжения, а самоход от тока бывает только в кратковременные моменты коротких замыканий, т. е. не имеет никакого значения для точности счетчика.
В то же время для реле вопросы самоходов весьма важны, особенно вопрос о токрвом самоходе, для которого магнитные системы счетчиков не имеют никаких регулировок; наличие самоходов либо ухудшает чувствительность реле (если направление самохода в сторону торможения), либо нарушает селективность (если направление и величина самоходов дают замыкание контактов). По этим причинам с реле, имеющими магнитную систему счетчиков, приходится иметь много работы и получается брак по самоходам при сборке, и калибровке, а иногда и неправильные выключения в эксплоатации. Очевидно, что индукционная система реле иметь микрометрическую и независимую регулировку самоходов тока и напряжения, возможную также и на месте монтажа, так как при транспортировке симметрия магнитных систем так или иначе нарушается и бывает необходима подрегулировка.
Сдвиг между потоками в ваттметровом счетчике осуществляется ближе к 90 (для точности отсчета при индуктивной нагрузке). В то же время для ваттметровых индукционных систем подобное требование не существует, так как без вреда для дела сдвиг в ваттметровых реле может быть в 80-85 (иногда требуется регулировка вниз). В то же время в системах счетчиков для достижения 90° сдвига принимаются особые меры. Одной из таких мер является шунтировка потока катушки напряжения
отводящая большую часть шунтового потока мимо диска и уменьшающая (при равных прочих условиях) момент вращения. Естественно, что для реле подобная шунтировка должна быть устранена. Пробле1ма быстродействия является специфичной для реле и не имеет никакого отношения к счетчикам. Характеристикой быстродействия является минимальное время выдержки реле при многократных режимах трогания. При этом величина этого минимального времени всецело зависит от величины момента при данной кратности режима трогания (например, при кратности, равной 10), т. е. также от величины рабочего момента (в режиме трогания). Чем больше величина рабочего момента, тем выше быстродействие и надежнее арретировка реле. Таким образом вопрос о быстродействии реле упирается в проблему получения от магнитной системы максимального рабочего момента (при равных прочих условиях).
Вопрос о токовой зависимости существует только для реле, поскольку для счетчиков нормированы пределы работы 5-200% номинального тока. Большие кратности токов в сериеснух обмотках индукционных реле вызываюгт добавочный нежелательный фактор - зависимость чувствительности и внутреннего сдвига от силы тока; пути шунтового и сериесного потоков неизбежно накладываются в сериесной (или шунтовой) магнитной системе при насыщении сериесной системы, искусственно создаваемой для надежности (вибрация диска). Поэтому отход обычных счетчиковых магнитных систем к конструкциям, устраняющим вибрации диска, и к независимым в магнитном отношении друг от друга системам устранит токовую зависимость в индукционных реле, весьма нежелательную .для многих ее применений (дистанционные,направленные, диференциальные и прочие реле).
Наконец, вопросы производства также имеют противоречие в магнитных системах для счетчиков и индукционных реле: обычно применяемая для счетчиков броневая шунтовая система (например, Магнитная система упомянутого выше индукционного реле типа ИТ) весьма неудобна для шихтовки (и расшихтовки), требуя кустарного (ручного) труда.
Приведенные соображения доказывают необходимость отказа от применения в инаукционных реле магнитных систем счетчиков и выдвигают проблем/ создания специальной магнитной системы индукционных реле, удовлетворяющую по своей конструкции и размерам всем основным релейным параметрам. „Нестандартность такой системы с обычными счетчиками оправдывается достаточной массовостью производства индукционных реле, а еще более-улучшением их решающих параметров: надежности, селективности, быстродействия, чувствительности потребляемой мощности.
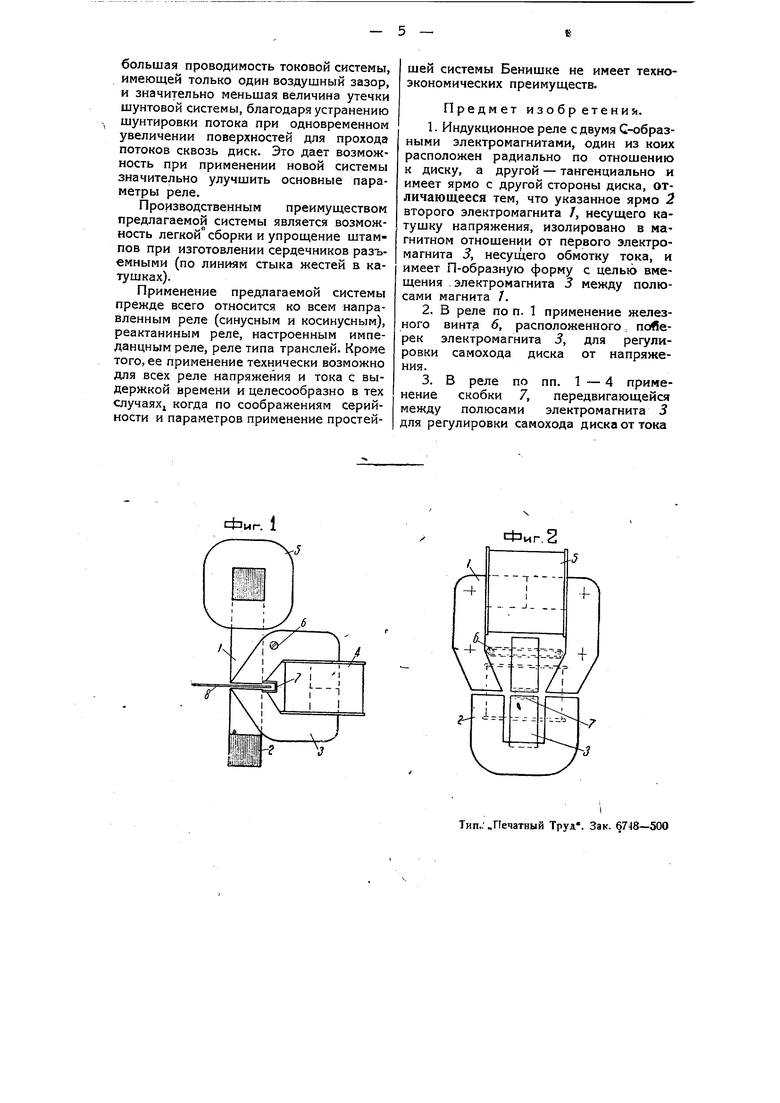
В предлагаемом индукционном реле конструкция магнитной системы основана на изложенных предпосылках и имеет целью дать более совершенный тип индукционного реле, чем существующие. В предлагаемом реле, как и в одном из известных типов, применены два С-образных электромагнита, один из коих расположен радиально по отношению к диску, а другой-тангенциально и имеет ярмо с другой стороны диска; при этом, согласно изобретению, ярмо второго электромагнита, несущего катушку напряжения, изолировано в магнитном отношении от первого электромагнита, несушего обмотку тока, и имеет П-образную форму с целью вмещения полюсов электромагнита тока между полюсами магнита, несущего катушку напряжения.
Кроме того, в реле применены железный винт, расположенный поперек электромагнита тока для регулирования самохода диска от напряжения, и скобка, передвигаемая между полюсами электромагнита тока с целью регулировки самохода диска от тока.
На чертеже изображено в двух проекциях примерное конструктивное оформление предлагаемого реле.
Реле состоит из тангенциальной системы напряжения (электромагнит /), имеющей под диском магнитное ярмо 2, из радиальной системы тока (электромагнит 5), являющихся взаимонезависнмыми в магнитном отношении. Катушки обеих магнитных систем расположены таким образом, что взаимодействие их.
потоков утечки с токами в диске полностью уничтожается: токовая катушка 4 расположена в удалении от диска и симметрична по отношению к нему; катушка напряжения 5 имеет плоскости своих витков перпендикулярными к токам в диске. Регулятор самохода от напряжения состоит из железного винта 6, ввинченного в токовую систему. Его вращение в обе стороны изменяет магнитную симметрию шунтовой системы благодаря потокам утечки, переходящим в винт с того полюса шунтовой системы, к которому винт подвинчен ближе; благодаря этому достигается микрометрическая регулировка самохода от напряжения. Регулятор токового самохода устроен по принципу экрана Бенишке. Он состоит из медной или алюминиевой скобки 7, входящей в пазик токовой магнитной системы. При симметричном положении этого экрана возникающие в нем токи дают с -токами в диске 8 силу взаимодействия, направленную через ось. При перемещении экрана вдоль паза появляется момент, направленный в ту или другую сторону, в зависимости от направления смещения экрана.
Если перемещение экрана осуществлять винтом, то можно добиться прецизионной регулировки токового самохода (независимо от регулировки самохода от напряжения).
Основной оценкой добротности индукционной системы является величина момента вращения, отнесенная к одному вольт-амперу потребляемой мощности.
Как было указано выше, момент реле определяет важнейшие параметры, а добротность измеряет удельную величину момента, характерную для конструктивного качества и размеров системы.
Далее приведен вывод формулы для добротности индукционной системы принципа Феррариса.
Если обозначить через К4-вольтамперы обмотки, Фо - величину полного потока системы, N - число витков, V - напряжение на обмотке и /-силу тока, то можно написать:
N Л/ Фо /.
С другой стороны величина полного лотока Фр пропорциональна ампервиткам
системы и полной магнитной проводимости Xfl:
Фо Сз TV - / ХоВеличина полной проводимости Хо включает в себе проводимость потокам утечки плюс проводимость рабочему потоку, проходящему --сквозь диск и участвующему в образовании момента, которую обозначим через X. Тогда, если К-коэфициент утечки, то
ИФО А:Ф,
где ф - величина полезного потока, проходящего сквозь диск. После подстановок получим:
Из этой общей формулы получим величины потребляемых мощностей для шунтовой и сериесной катушек (с соответствующими индексами):
Фш2- Ка
. VA
V Лщ Сг
; УЛс Cj;.
ЛшХс
Момент индукционной системы зависит от величины потоков:
. Фс - Фш.
Из последних трех формул получим величину добротности индукционной системы:
) .
УУАш- УЛс
Подкоренные выражения надо рассматривать как геометрически средние величины потребляемых мощностей, проводимостей, коэфициентов утечки систем тока и напряжения. Формула наглядно показывает, что добротность, определяющая момент и потребляемую мощность реле, ухудшается с уменьшением проводимостей в зазоре и с увеличением магнитных систем.
Простое сравнение предлагаемой магнитной системы (см. чертеж) и обычных счетчиковых систем (см. систему указанного выше реле типа ИТ) показывает, что при примерно одинаковых габаритах систем добротность предлагаемой системы в несколько раз более. Причиной этого является значительно
большая проводимость токовой системы, имеющей только один воздушный зазор, и значительно меньшая величина утечки шунтовой системы, благодаря устранению шунтировки потока при одновременном увеличении поверхностей для прохода потоков сквозь диск. Это дает возможность при применении новой системы значительно улучшить основные параметры реле.
Производственным преимуществом предлагаемой системы является возможность легкой сборки и упрощение штампов при изготовлении сердечников разъемными (по линиям стыка жестей в катушках).
Применение предлагаемой системы прежде всего относится ко всем направленным реле (синусным и косинусным), реактаниным реле, настроенным импеданцным реле, реле типа транслей. Кроме того, ее применение технически возможно для всех реле напряжения и тока с выдержкой времени и целесообразно в тех случаях когда по соображениям серийности и параметров применение простейшей системы Бенишке не имеет техноэкономических преимуществ.
Предмет изобретения.
1. Индукционное реле с двумя С-чэбразными электромагнитами, один из коих расположен радиально по отношению к диску, а другой - тангенциально и имеет ярмо с другой стороны диска, отличающееся тем, что указанное ярмо 2 второго электромагнита 7, несущего катушку напряжения, изолировано в магнитном отношении от первого электромагнита 5, несущего обмотку тока, и имеет П-образную форму с целью вмещения электромагнита 5 между полюсами магнита 7.
2,В реле по п. 1 применение железного винта 6, расположенного, пойерек электромагнита 3, для регулировки самохода диска от напряжения.
3.В реле по пп. 1 - 4 применение скобки 7, передвигающейся между полюсами электромагнита 3 для регулировки самохода диска от тока
| название | год | авторы | номер документа |
|---|---|---|---|
| Электродинамическое реле направления мощности | 1932 |
|
SU36516A1 |
| Электромагнитное реле для защиты роторов генераторов от нагрева и повреждений | 1935 |
|
SU53557A1 |
| Трансформаторное реле | 1936 |
|
SU48730A1 |
| Устройство для температурной защиты электрических машин | 1935 |
|
SU47361A1 |
| Устройство для регулирования направляющего аппарата для трогания с места гидротурбины | 1939 |
|
SU62221A1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ВОЛЬТАМПЕР ИЛИ ВОЛЬТАМПЕРЧАСОВ В СЕТИ ПЕРЕМЕННОГО ТОКА | 1925 |
|
SU4618A1 |
| Устройство для повышения мощности подводимой к реле направления энергии в защитах от замыкания на землю при неполных заземлениях | 1936 |
|
SU51480A1 |
| Устройство для дифференциальной защиты линий передачи по системе "Транслей" | 1935 |
|
SU45671A1 |
| Дифференциальное реле | 1938 |
|
SU56609A1 |
| Устройство для исключения безучетного пользования электрической энергией | 1987 |
|
SU1580259A1 |

