1
Изобретение относится к области приборостроения.
Известен уровнемер для сыпучих материалов, содержащий зонд, подвешенный на тросе, намотанном на поворотный барабан с приводом и пневматическим тормозным устройством, ось которого соединена с датчиком угла поворота, и пневматический управляющий блок.
Однако известный уровнемер сложен конструктивио из-за наличия электропривода и специального тормозного устройства фрикционного типа.
Для упрощения конструкции в предлагаемом уровнемере привод и тор.мозиое устройство выиолиеиы в виде пиевмоцилиидра, к порщию которого присоединен трос и имеющего со стороиы барабана канал связи с иневматическим управляющим блоком, а датчик угла новорота вынолиен в виде редуктора давления, ири этом в иневматический блок введены два рещающих усилителя, повторитель со сдвигом, ячейка памяти и регулируе.мый дроссель, приче.м выход редуктора давления соединен с верхней камерой повторителя со сдвигом и ячейкой памяти, вход которой соединен с выходом первого пнев.мореле и через регулируемый дроссель - с камерой пнев.моцилиндра и иижией уиравляющей камерой первого рещающего усилителя, а вы2
ход - с иижней уиравляющей камерой второго рещающего усилителя, верхняя унравляющая камера которого соединена с нижней камерой повторителя, а выход - с нижними управляющими камерами двух пневмореле, верхние камеры которых соединены с выходом второго пневмореле, соединенного с выходом первого решающего усилителя.
На чертеже показана принципиальная с.хема описываемого уровнемера, состоящего из зои;(1 1 в виде груза, подвешенного иа гпбко.м тросе 2. иамотаииом иа барабан 3, который жестко укреплен иа вращаюп1ейся в лодшипиика.х оси 4. Па оси 4 рядом с барабаиом 3 установлен второй барабан 5 меньшего диамет)а. Ось барабапов 4 посредством муфты соедииеиа с винтом датчика 6 угла поворота, иаири.мер, редуктор давления воздуха. Па барабаи 5 1амотаи гибкий трос 7. соединенный с цорщцем 8 пневмогллиидра 9, имеющего каиал связп с управляющим блоком 10. Управляющий блок 10 состоит из решающих усилителей 11 и 12, лпев.морсле 13 и 14. повторителя 15 со сдвигом с дросселем гптания 16, клапанов 17, 18 и емкости 19. составляющих ячейку иа.мяти, и регулируемо:о дросселя 20. Па выходе управляющего установлен индикатор давления, напри.мер манометр 21.
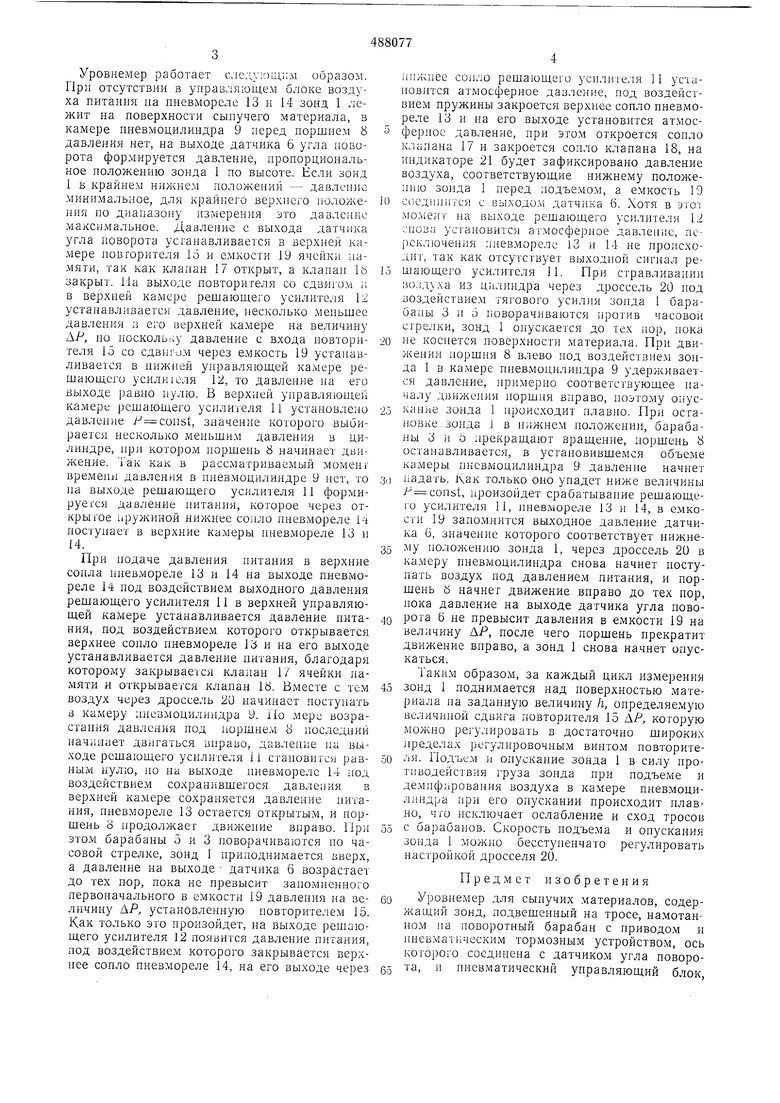
Уровнемер работает следу1011и;м образом. При отсутствии в управляющем блоке воздуха питания иа пиевмореле 13 к 14 зонд 1 лежит на поверхности сыпучего материала, в камере пневмоцилиндра 9 перед поршнем 8 давления нет, на выходе датчика 6 угла поворота формируется давление, пропорциональное положению зонда 1 по высоте. Если зонд 1 в крайнем нижнем положении - давление минимальное, для крайнего верхнего положения но диапазону измерения это давление максимальное. Давление с выхода датчика угла поворота устанавливается в верхней ка-мере иовгорителя 15 и емкости 19 ячейки памяти, так как клапан 17 открыт, а клапан 16 закрыт, lia выходе повторителя со сдвигом и в верхпей камере решающего усилителя 12 устанавливается давление, несколько меньшее давления в его верхней камере на величину ДЯ, но носколь, давление с входа новторителя 15 со сдвигом через емкоеть 19 устанавливается в нижней управляющей камере решающего усили1еля 12, то давление на его выходе равно нулю, В верхней управляющей камере решающего усилителя 11 устаповлепо давлеиие Р const, значение которого выбирается несколько меньшим давления в цилиндре, при котором иорщень 8 начинает движение. Так как в рассматриваемый момент времени давления в пневмодилиндре 9 нет, то на выходе решающего усилителя 11 формируется давление питания, которое через открытое пружиной нижнее сопло нневмореле 14 ностунает в верхние камеры нневмореле 13 п 14.
При иодаче давления питания в верхние сонла нневмореле 13 и 14 на выходе пневмореле 14 под воздействием выходного давления решающего усилителя И в верхней унравляющей камере устанавливается давление питания, под воздействиелМ которого открывается верхнее сонло пневмореле 13 и на его выходе устанавливается давление питания, благодаря которому закрывается клапан 17 ячейки памяти и открывается кланан 18. Вместе с тем воздух через дроссель 2и начинает поступать в камеру пневмоцилиидра 9. По .мере возрастания давления под поршнем о последний начинает двигаться вправо, давлепие па выходе решающего усилителя 11 становится равным нулю, но на выходе иневмореле 14 под воздействием сохранившегося давления в верхпей камере сохраняется давлепие питания, пневмореле 13 остается открытым, и поршень 3 продолжает движепие вправо. При этом барабаны 5 и 3 поворачиваются по часовой стрелке, зонд 1 приподнимается вверх, а давление на выходе - датчика 6 возрастает до тех нор, пока не превысит запомненного первоначального в емкости 19 давления на величину Д.Р, установленную повторителем 15. Как только это произойдет, на выходе решающего усилителя 12 появится давление питапия, под воздействием которого закрывается верхпее сопло пневмореле 14, на его выходе через
сопло решающего уснлите.ш 11 установится атмосферное давление, под воздействием пружины закроется верхнее сопло пневмореле 13 н на его выходе установится атмосферное давление, при этом откроется сопло клапана 17 и закроется сопло клапана 18, на индикаторе 21 будет зафиксировано давление воздуха, соответствующие нижнему положению зонда 1 перед подъемом, а емкость 19 ) соедшиггся с выходом датчика 6. Хотя в это: момент па выходе решающего усилителя 12 снова установится агмосфе зное давлепие, пе)сключепия лневмореле 13 и 14 не происходит, так как отсутствует выходной сигнал ре5 шающего усилителя 11. При стравливании :503;iyxa из ци;1иидра через дроссель 20 иод воздействием тягово1о усилия зоида 1 барабаны 3 п 5 11оворачиваются против часовой стрелки, зонд 1 опускается до тех пор, пока 0 пе коспется поверхпости материала. При движении порщня 8 влево под воздействием зопда 1 в камере пневмоцилипдра 9 удерживается давление, примерно соответствующее началу движения иоршпя вправо, поэтому опус5 капие зопда 1 происходит плавно. При оста110)зке зоида 1 в нижнем ноложени, барабаны 3 и 5 прекращают вращение, поршень 8 останавливается, в установившемся объеме камеры пнсБмоцилипдра 9 давлеппе начнет 0 пада1ъ. Как только оно упадет ниже величины P consi, произойдет срабатывание решающего усилителя 11, пневмореле 13 и 14, в емкости 19 запомпится выходное давление датчика 6, значение которого соответствует нижпе5 му положению зонда 1, через дроссель 20 в камеру пневмоцилиндра енова начнет поступать воздух под давлением питания, и поршень 8 начнет движение вправо до тех пор, нока давление на выходе датчика угла пово0 рота б не превысит давления в емкости 19 на величину ДЛ после чего поршень прекратит движение вправо, а зонд 1 снова начнет опускаться.
Таким образом, за каждый цикл измерения 45 зонд 1 поднимается над поверхностью материала па заданную величину h, определяемую величнной сдвига повторителя 15 АР, которую можно регулировать в достаточно широких пределах рсгулировочпым винтом новторите.50 ля. Подъем и опускание зонда 1 в силу противодействия груза зопда при подъеме и демпфирования воздуха в камере пневмоцилгпадра при его опускании происходит плавно, что исключает ослаблепие и сход тросов 55 с барабапов. Скорость подъема и оиускапия зоида 1 можпо бесступенчато регулировать настройкой дросселя 20.
Предмет изобретения
(30 Уровнемер для еынучих материалов, содержащий зонд, подвешепный на тросе, намотанном па поворотный барабан с приводом п ипевматкческим тормозным устройством, ось которого соединена с датчиком угла поворо55 та, и пневматический управляющий блок,
О
включающий два шкрллосслс, отличающийся тем, что, с ис, у11рои1,сиия конструкции, в нем привел и тор-мозиое устройст:;о выполнены в виде ниез.моцилиндра, к горщню которого пр11соеди11еи трос и имеюще о со стороны барабана канал с ипев.матическим управляющим блоком, датчик угла поворота выполнен в виде редуктора давления, при этом в пневматический блок введены два решающих усилителя, новторитель со сдвигом, ячейка памяти и регулируемый дроссель, причем выход редуктора давления соединен с верхней камерой повторителя со
с/изпгом и ячеГпхОЙ иамяти, вход которой соел. с выходом первого пневмореле и через регулируемый дроссель - с камерой пневмоцилиндра и нижней управляющей камерой первого решающего усилителя, а выход - с нижней управляющей камерой второго решающего усилителя, верхняя управляющая камера которого соединена с камерой повторителя, а выход - с нижними управляющими камерами двух пневмореле, верхHiic камеры которых соединены с выходом второго иневмореле, coeдlп eннoгo с выходом nejiBoro рещающего усилителя.

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидростатический уровнемер | 1983 |
|
SU1093905A2 |
| Уровнемер сыпучих сред | 1975 |
|
SU581382A1 |
| Аэрозольный ингалятор | 1985 |
|
SU1321422A1 |
| Уровнемер гидростатический | 1978 |
|
SU697828A1 |
| ПНЕВМАТИЧЕСКАЯ СИСТЕЛ\А АВТОМАТИЧЕСКОГОУПРАВЛЕНИЯ, ВЫЧИСЛЕНИЯ, | 1961 |
|
SU141684A1 |
| ПНЕВМАТИЧЕСКИЙ АВТОМАТИЧЕСКИЙ САМОНАСТРАИВАЮЩИЙСЯ РЕГУЛЯТОР | 1965 |
|
SU175757A1 |
| ПНЕВМАТИЧЕСКИЙ ДИСКРЕТНЫЙ РЕГУЛЯТО ОПТИМАЛЬНОГО РЕЖИМА | 1971 |
|
SU432457A1 |
| Уровнемер гидростатический | 1976 |
|
SU607111A1 |
| Медицинский отсасыватель | 1987 |
|
SU1496800A2 |
| Пневматический плотномер жидкости | 1982 |
|
SU1062563A1 |
vrn rii
. /
1 J / pi
