1
Настоящее изобретение относится к области управления технологическими процессами в химической, нефтехимической, нефтеперерабатывающей и других отраслях промышленности и предназначено для оптимального автоматического управления процессами с использованием объективно существующих внутренних связей процесса.
Известные пневматические онтимальные регуляторы обеспечивают поиск экстремума или с недоходом справа или слева к нему. Основные недостатки их выражаются в наличии непрерывных колебаний у экстремума, зона которых для ряда процессов превыщает допустимую величину.
Предложенный пневматический дискретный регулятор оптимального режима, содержащий блок интегрирования, подключенный к выходному каналу, блок ограничения и блок генератора-имнульсатора, в отличие от известных содержит устройство регулирования соотношения с дроссельной приставкой, повторителе.м, сумматором и операционным усилителем, повторители с положительным и отрицательным сдвигом, два противофазно включенные элементы сравнения, одни из управляющих камер которых через повторители с положительным и отрицательным сдвигом соединены с выходом операционного усилителя устройства регулирования соотношения.
другие управляющие камеры - с выходом, противофазным выходу операционного усилителя, сумматора устройства регулирования соотнощения, пневмореле, включенное по схеме «ИЛИ и соединенное с выходами противофазно включенных элементов сравнения, один из которых подключен к выходу блока ограничения, и ячейку непрерывной памяти, управляющая камера которой соединена с выходом пневмореле, а камера запоминания и выход соединены соответственно с выходом блока генератора-импульсатора и входом блока интегрирования. Кроме того, камеры задания уровня сигнала выхода сумматора и операционного усилителя устройства регулирования соотношения соединены через повторитель с камерой дистанционного задания коэффициента соотношения дроссельной приставки. Благодаря такой конструкции повыщается надежность и улучшаются динамические характеристики устройства.
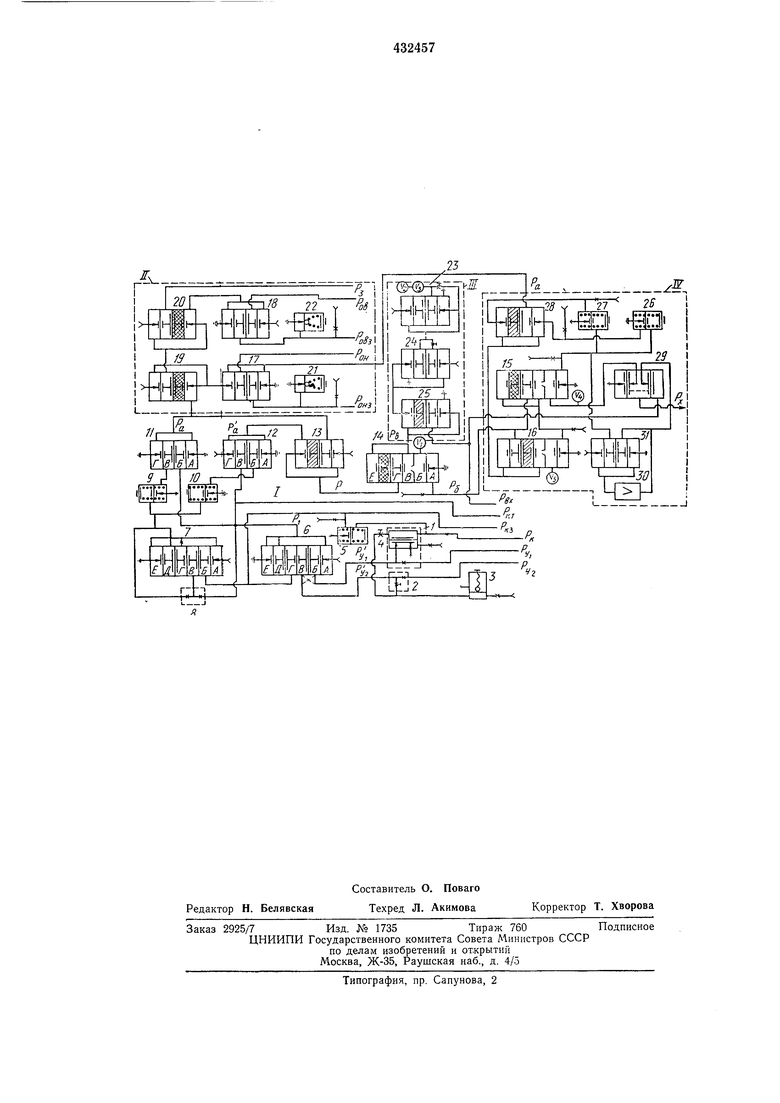
Принципиальная схема регулятора представлена на чертеже. Обозначения сигналов, поступающих на входы и выходы регулятора: Pyi, Pyz - параметры соотношения (вход); Як - задание коэффициента соотношения; РКЗ, РКТ - заданное и текущее значение коэффициента соотношения; Рвх - командный сигнал отключения регулятора; РХ - управляющий сигнал (выход регулятора); РОВ, онэ - параметр нижнего ограничения и его задание; ов, -Ровз - параметр верхнего ограничения и его задание; Яз -сигнал третьего ограничения. Пневматический дискретный регулятор оптимального режима предназначен для автоматического поддержания заданного оптимального режима процесса. Оптимальный режим задается коэффициентом соотношения двух целевых противоречивых параметров процесса Pyi и , величина которого устанавливается по принятому локальному или внешнему критерию оптимальности. Регулятор реализуется на пневматических элементах УСЭППА и состоит из блока I соотношения и управления выходом регулятора, блока ограничения II, блока генератора-импульсатора III и блока интегрирования IV. Блок I обеспечивает получение непрерывного сигнала рассогласования между текуш,им и заданным коэффициентом соотношения и формирование двух дискретных сигналов управления выходом регулятора РХ и состоит из пропорциональной и дискретной частей. Пропорциональная часть его выполнена па двух дроссельпых сумматорах 1, 2, задатчике 3, регулируемом дросселе 4, повторителе со сдвигом 5, постоянных дросселях и двух элементах сравнения 6, 7 с дроссельным сумматором 8. Элементы соединены по схеме регулятора соотношения, в которой отсутствуют интегральная часть, усилитель мошности и отключаюш,ее реле, а на вход элемента 1 дроссельной приставки и в камеры задания уровня сигнала выхода элементов сравнения 6 и 7 через повторитель 8 подается уменьшенный на Р сигнал задания коэффициента соотношения Рк. Это позволяет выполнять контроль заданного () и текущего (Рк) значений коэффициента соотношения и градуировку шкалы измерителя. Элементы 1, 2, 3 и 4 схемы выполняют функции дроссельной приставки соотношения, элемент 7 - сумматора, 7 и 8 - операционного усилителя. Величина коэффициента соотношения К Р К - - -- задается изменением проводимоРуЛKlсти регулируемых сопротивлений: в 2 один раз для настройки Kz вручную при градуировке измерителя /Ст и Kz с дополнительной подстройкой 4, а в 1 для настройки Ki - дистанционно изменением РК. Коэффициент соотношения может настраиваться в пределах 0,1 - 10. Соответствие требуемого коэффициента соотношения целевых параметров (показате/ Р лей) (/С -- задаваемому (/Сз) давлением Рун I РК проверяется равенством (Pyi Py2) давлений выхода с элементов 1 и 2 или равенством () давлений выхода с повторителя 5 и элемента сравнения 6, так как в элементе сравнения 6 Pyi и Ру2 уравновешивают друг друга, а уровень РКЗ пропорционален разной, но постоянной для фиксированных положений регулируемых сопротивлении величине К. Выходы сумматора (элемента сравнения 6) PI и операционного усилителя противофазны, изменяются при изменении текущего коэффициента соотношения (/Ст) около уровня сигнала РКЗ, пропорционального /Сз, и используются для выработки управляющих сигналов шаговым приращением выхода регулятора Р. Коэффициент усиления в операционном усилителе выбирается таким, чтобы незначительные отклонения /Ст от K.z вызывали между PI и PZ рассогласования, превышающие зопу нечувствительности элементов регулятора. Это позволяет повысить точпость регулирования соотношения, а устойчивость процесса регулировапия при этом сохраняется, так как значительно усиленный сигнал рассогласования отрабатывается щаговыми добавками, оптимальная величина и частота воздействия которых определяется для каждого объекта. Настройка САР значительно упрощается, так как для этого необходимо определепие только зоны нечувствительности и времени переходного процесса по регулирующему каналу. Дискретная часть блока 1 выполнена на двух повторителях 9, 10 с положительным и отрицательным сдвигом, двух элементах сравнения И, 12, пневмореле 13 и ячейке непрерывной памяти 14; управляющие камеры элементов сравнения И, 12 через повторители 9, 10 соответственно соединены с выходом операционного усилителя (7, 8), а другие управляющие камеры - с выходом сумматора (элемента сравнения) 6; выходы элементов сравнения 11, 12 через реле 13, включенное по схеме «ИЛИ, соединены с управляющей камерой ячейки непрерывной памяти 14, камера запоминания которой соединена с выходом блока III, а выход--с управляющими камерами ячеек непрерывной памяти 15, 16 блока интегрирования IV. Кроме того, вход элемента сравнения 11 соединен с блоко.м ограничения П. Блок I на выходе имеет два дискретных сигнала: Ра - обеспечивает выбор направления щаговой добавки к выходу регулятора РХ (-}- или -); Рб - выполняет реализацию или задерлску ее, если изменение регулируемой величины (коэффициента соотнощения) не превышает заданной зоны стабилизации (2). Зона стабилизации 2, в пределах которой выход регулятора не из.меняется, настраивается повторителями со сдвигом в 9 -v. в 0 +Т от условпого нулевого уровня сигнала, задаваемого РКЗ- Ширина задания зоны стабилизации в первую очередь зависит от общей нечувствительности элементов нзмерителя и регулятора, а также от требований ведения процесса. Блок ограничения 11 обеспечивает реверс сигнала Ра, если другие параметры при следовании регулируемой величины к заданным условиям процесса достигают значений выше или ниже допустимых. Он состоит из элементов сравнения 17, 18, пневмореле 19, 20 и задатчиков 21, 22 с постоянными дросселями: элемент сравнения 18 совместно с пиевмореле 19, 20 работает на верхнее и третье ограничение, а элемент сравнения 17 - на нижнее. Величина ограничения задается соответствующими задатчиками 22, 21.
Генератор-имиульсатор III создает равномерно чередующиеся импульсы давления (0,1; О-атмосферное, 1-давление питания, равное 1,4 ат) и состоит из элементов сравнения 23, 24 емкостей, регулируемых дросселей и отключающего пневмореле 25, которое управляется давлением РВХ. поступающим от вторичного прибора при установке его в промежуточное положение (Ручное-Автомат). Продолжительность импульса Рв 0 и настраивается соответственно дросселями этого блока.
Блок интегрирования IV по командам блока соотнощения и управления формирует и выдает на исполнительный механизм выходной сигнал регулятора Р и состоит из повторителей со сдвигом, включенных с +ДРх - 26 и -ЛРх - 27, ячеек памяти 15, 16, повторителя 28, обеспечивающего подключение по команде Ра выхода повторителя (27 или 26) ко входу ячейки памяти 16, постоянных дросселей, выключающего реле 29 и усилителя мощности 30 со следящим устройством 31. Обе ячейки памяти 15, 16 управляются сигналом Рб ячейка 16 обеспечивает задержку на такт, а ячейка 15 формирует сигнал выхода регулятора PxiAPx- Надежную иередач выхода по трассе обеспечивают элементы 31, 30, а отключение регулятора - элемент 29 по команде Рпх.
Заданные установивщиеся условия протекания процесса могут нарущаться изменения гн входных переменных. Эти изменения через внутренние связи постоянно нередаются на выход, вызывая отклонение двух выходных противоречивых параметров процесса. Измеряемые противоположные отклонения их используются регулятором для формирования управляющего сигнала, который принудительно изменяется на величину щага ± ДРх и вызывает изменение входного основного параметра (параметров), имеющего ббльщую степень влияния на ход процесса, чем входные нерегулируемые переменные. При этом компенсируются отклонения режима процесса, что уменьщает разбаланс между текущим и заданным соотношением противоречивых параметров Pyi и Ру2. Пневматические сигналы, пропорциональные Pyi и Ру2 от измерительных приборов поступают на вход дроссельной приставки соотношения, на выходе которой формируются давления: Pyi (Pyi-
-0,2)-/Ci, Ру2 (Ру2-0,2)-/С2, где /Ci и /йзаданы проводимостью переменных сопротивлений в 1 и 2. Оба давления воздействуют на мембранные блоки сумматора 6 и операционного усилителя 7, выходные давления кото
рых равны: Р1 Ркз:±(Ру1--Ру2); ±(Ру1-Ру2)-/Со, где /(о - настраивается регулируемым сопротивлением в 8. Давления PI, Ро -7 и f 2 +7 непрерывно поступают соответственно в управляющие камеры элементов сравнения И и 12, формирующие исходные дискретные (0,1) сигналы направления выхода регулятора и выдачи шаговой добавки.
Равновесие в пропорциональной части блока I наступает, когда менсду выходными параметрами процесса выдержано заданное давлением Р,; соотношение, так как при этом Яу1 Руо. Следовательно, при Кт Кз
PVI -0,2 АГг
имеется равенство Pi P2
Я, 2-0,2 ATi
- I;T.
Равновесие нарушается при . Если
.ч, то , а и наоборот , а , если . В первом случае, когда , но + Y давление выхода элемента И , а элемента 12 -
Ра 1, так как они включены в противофазе. Во втором случае, когда но - Y; с элемента И Ра 1, а с элемента 12 Ра 0. Давление Ра поступает в блок ограничения II и совместно с Ра является входом пневмореле 13, выходное давление Р которого управляет выходом ячейки памяти 14 и повторяет равномерно чередующиеся импульсы генератора-импульсатора, т. е. Рб Рп 0 или 1. При уменьшении разбаланса PI-Ро или Рг-PI в момент, когда Pi P2-fY О , выход элемента 12 сменит 1 на О или но выход элемента 11 сменит 1 на 0. Как в первом, так и во втором случаях выход пневмореле
13 сменит 1 на О, так как при этом 0. Поскольку Р 0 командное давление Рб ячейки памяти 14 постоянно повторяет О или 1, запомненные в камере запоминания давлением большого подпора (0,8 ат), т. е. Рб 0
или .
Если текущее значение параметра нижнего ограничения Рон выще его задания РОНЗ, а текущее значение параметра верхнего ограничения РОП ниже его задания РОВЗ и параметр
третьего ограничения отсутствует, то сигнал Ра проходит в управляющую камеру пневмореле 28. Нарушение ограничений приводит к реверсу сигнала Ра: с на при нарушении нижнего ограничения и с
на при нарушении верхнего ограничения или наличии третьего ограничения.
Если Ра 0 то под действием малого подпора (0,4 ат) пневмореле 28 соединяет выход
повторителя 27, равный РХ-АРх. с камерой запоминания ячейки памяти 16. Если геиератор-импульсатор подключен, а Рб 0, то сигнал РХ-АРх пройдет в камеру запоминания и повторения ячейки памяти 16, повторится
выходе и пройдет в камеру запоминания
ячейки памяти 15, но в камеру повторения не пройдет, так как вход в нее перекрыт большим подпором. На выходе ячейки памяти 15 в это время повторяется запомненное за предыдущий шаг давление Р, которое через усилитель со следящим устройством и выключающее реле поступает на выход регулятора и одновременно на входы повторителей 26, 27. На выходе последних к нему прибавляются соответственно -ДРх и . Выход регулятора изменяется при смене сигнала с Рб 0 на . Давление РХ-Д/ х запоминается в ячейке памяти 16 одновременно и поступает в камеру повторения ячейки памяти 15, выход которой уменьшается на -ЛЯх. Поскольку выход ячейки памяти 15 соединен со входами повторителей 26, 27, выходы которых изменяются соответственно на -ДРх и Ч-Д/х, то в камеру запоминания ячейки памяти 16 придет давление РХ-ДЛх+Д х. Процесс повторяется при смене на Рб 0. Принудительное уменьшение регулирующего параметра осуществляется до тех пор, пока Pi-Pz -y при ., т. е. пока , Яа 1, а . Когда . но еще сигнал Ра 1 станет Ра 0. Это приводит к смене Р на и сигнал Рб станет равным О или 1 и останется, как и выход регулятора, постоянным - процесс находится в зоне стабилизации.
Регулятор аналогично работает, если , но выход его увеличивается па каждый шаг на +ДРх до тех пор, пока Р2-PI Y. Когда Р2-Pi 7, но еще сигнал Ра 1 станет Ра -0. Это приведет к смене знака на Р 0 - процесс также войдет в зону стабилизации.
Таким образом, регулятор, принудительно изменяя шаговыми добавками значение входного основного параметра (параметров), обеспечивает возвращение процесса в зону стабилизации, т. е. к заданным оптимальным условиям протекания процесса.
Предмет изобретения
1. Пневматический дискретный регулятор оптимального режима, содержащий блок интегрирования, подключенный к выходному каналу, блок ограничения и блок генератораимпульсатора, отличающийся тем, что,
с целью повыщения надежности и динамических характеристик устройства, он содержит устройство регулирования соотношения с дроссельной приставкой, повторителем, сумматором и операционным усилителем, повторители с положительным и отрицательным сдвигом, два противофазно включенные элемента сравнения, одни из управляющих камер которых через повторители с положительным и отрицательным сдвигом соединены с
выходом операционного усилителя устройства регулирования соотношения, а другие управляющие камеры - с выходом, противофазным выходу операциопного усилителя, сумматора устройства регулирования соотношения, пневмореле, включенное по схеме «ИЛИ и соединенное с выходами противофазно включенных элементов сравнения, один из которых подключен к выходу блока ограничения, и ячейку непрерывной памяти, управляющая камера которой соединена с выходом пневмореле, а камера запоминания и выход соединены соответственно с выходом блока геператора-импульсатора и входом блока интегрирования.
2. Регулятор оптимального режима по п. 1, отличающийся тем, что камеры задания уровня сигнала выхода сумматора и операционного усилителя устройства регулирования соотношения соединены через повторитель с камерой дистанционного задания коэффициента соотношения дроссельной приставки. 25 Г ©пФгГ - - -.--. l4J|h -г у J. . z. ff.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический регулятор | 1978 |
|
SU840796A1 |
| ПНЕВМАТИЧЕСКОЕ ВЫЧИСЛИТЕЛБНОЕ УСТРОЙС1 ДЛЯ ХРОМАТОГРАФА | 1968 |
|
SU231889A1 |
| ПРОГРАММНОЕ УСТРОЙСТВО | 1969 |
|
SU241140A1 |
| ПНЕВМАТИЧЕСКИЙ ГЕНЕРАТОР | 1972 |
|
SU323763A1 |
| Система связи электронно-вычислительной машины с пневматическими регуляторами | 1985 |
|
SU1341617A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1970 |
|
SU288439A1 |
| Уровномер для сыпучих материалов | 1973 |
|
SU488077A1 |
| Устройство для усталостных испы-ТАНий издЕлий | 1978 |
|
SU813192A1 |
| Пневматический регулятор с ограничением выходного сигнала | 1990 |
|
SU1791794A1 |
| ПНЕВМАТИЧЕСКИЙ АВТОМАТИЧЕСКИЙ САМОНАСТРАИВАЮЩИЙСЯ РЕГУЛЯТОР | 1965 |
|
SU175757A1 |