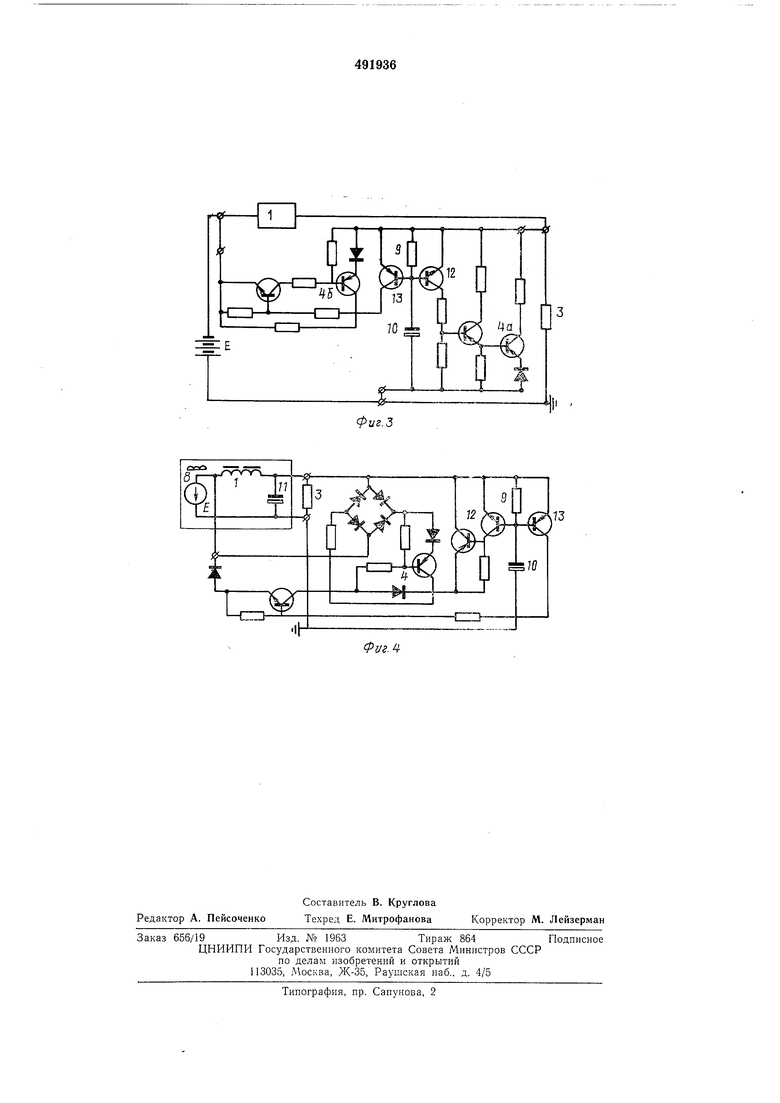
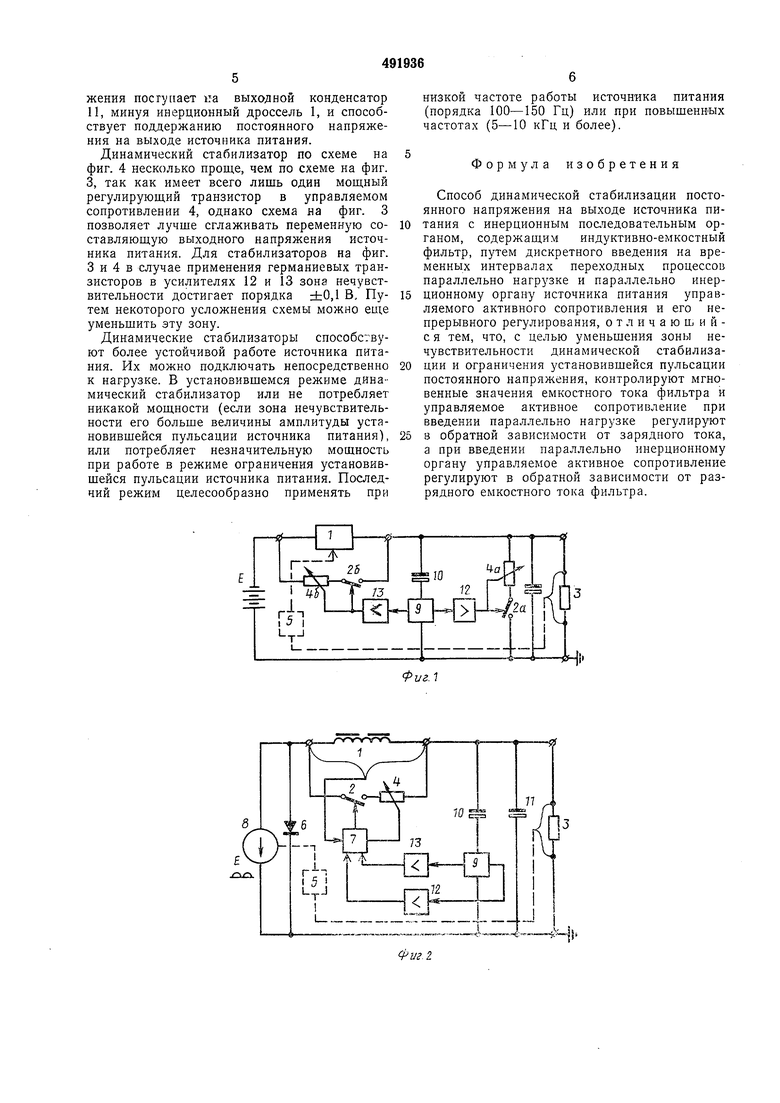
3 заряда, а при введении параллельно инерциоиному органу источника питания активное сопротивление регулируют в обратной зависимости от тока разряда емкости фильтра. На фиг. 1 и 2 показаны функциональные схемы динамических стабилизаторов, реализующих предложенный способ; па фиг. 3 и 4 - принципиальные схемы динамических стабилизаторов, соответствующие функциопальным схемам на фиг. 1 и 2. Источник питания постоянного тока содержит инерционный регулирующий орган 1, представляющий собой силовую цепь импульсного последовательного стабилизатора (см. фиг. 1) или дроссель фильтра демодулятора импульсиого источника питания либо сглаживающий дроссель LC-фильтра нестабилизированного выпрямителя (см. фиг. 2). Известный способ регулирования (стабилизации), обеспечивающий повыщенное быстродействие и высокий к. п. д. источпика питаПИЯ, заключается в том, что ключом 2 дискретно вводят па временных интервалах переходных процессов параллельно нагрузке 3 и параллельно инерционному органу 1 источ-2 пика питания управляемое сопротивление 4, которое регулируют в функции отклонения выходного напряжения источника питания. Управляющий сигнал на это сопротивление подают с устройства 5 обратной связи источ-3 ника питания. Функционально введение управляемого активного сопротивления 4 может быть выполнено по-разному. На фиг. 1 это сопротивление разделено на два регулируемых резистора 4а и 46, которые вводят поочередно ключами 2а и 26. На фиг. 2 сопротивление 4 может быть введено при помощи ключа 2 в одном временном интервале (нри открытом диоде 6) параллельно нагрузке 3, а в другом времеином интервале (при закрытом диоде 6) параллельно инерционному органу 1 (дросселю фильтра). В этой схеме управление осуществляют через логический усилительный элемент 7, на который подают информацию о полярности напряжения на дросселе 1 и о знаке динамической ошибки на выходе стабилизатора. Схема на фиг. 2 содержит источпик 8 импульсной э. д. с. Е. При помощи элемента 9 токи заряда и разряда конденсатора 10 на выходе источника пптапия разделяют и управляемое активное сопротивлепие 4 при введепии его параллельно пагрузке 3 регулируют в обратной зависимости от тока заряда копдепсатора 10, а при введении параллельно инерционному органу 1 источника питания активное сопротивление регулируют в обратной зависимости от тока разряда конденсатора 10. Унравление в функции тока конденсатора 11 осуществляется через усилитель 12 сигнала тока заряда и усилитель 13 сигнала тока разряда конденсатора 10. Это позволяет уменьшить зону нечувствительности динамической стабилизации и придать динамическим стабили4заторам свойство транзисторного фильтра для сглаживания п еременной составляющей выходного напряжения источника питания Емкость выходного конденсатора 11 источника может быть снижена. Схемы динамических стабилизаторов, разработапных по предложенному способу, просты и могут быть унифицированы (см. фиг. 3 и 4). Такие стабилизаторы могут быть выполйены как автономные устройства, которые можно подключить к любому источнику питапия для подавления переходных и установившихся выбросов напряжения, Динамические стабилизаторы на фиг. 3 и 4 выполнены на диодах и транзисторах. Элемент 9, разделяющий токи заряда и разряда конденсатора 10 на выходе источника питания, представляет собой два р-п-перехода, соединенных встречно-параллельпо и включенных последовательно с конденсатором 10. Усилитель 12 на транзисторе усиливает ток заряда, а усилитель 13 на транзисторе - ток разряда копденсатора 10. Стабилизатор (см. фиг. 3) работает следующим образом. При положительном динамическом отклопении выходпого папряжения источпика () конденсатор 10 начинает заряжаться через вход транзистора усилителя 12. При этом отпирается составной транзистор 4а, обеспечивающий увеличение нагрузки источника питания пропорциопальпо величине тока заряда копденсатора 10. Подключепие дополнительной нагрузки к источнику питания препятствует увеличению напряжения Ьвых. При отрицательном приращении выходного нанряжения (At/Bbix O) конденсатор 10 разряжается через вход транзистора усилителя 13. Последний отпирает составной транзистор 46, который обеспечивает дополнительпый ток в нагрузку, пропорциональный величине тока разряда копдепсатора 10, и препятствует снижению выходного папряжения. Динамический стабилизатор (см. фиг. 4) работает следующим образом, При 17вых -0 транзистор усилителя 12 пропускает ток только в том случае, если есть напряжение на его коллекторе, т. е. при /вых. Тогда открывается мощный тракзистор управляемого сопротивления 4, который поглощает избыточную энергию дросселя. Ток дросселя, отдаваемый в нагрузку и копдепсатор И, уменьшается, что препятствует увеличению . В интервалах времени, когда /7вых, транзистор управляемого сопротивления 4 закрыт, так как в противном случае это привело бы к увеличению напряжения бвых. В случае провала выходпого папряжения ()), наоборот, мощный транзистор управляемого сопротивления 4 открыт при , так как кондепсатор 10 разряжается и отпирает транзистор усилителя 13, а закрыт при f t/sbix. Энергия от источника 8 импульсного напряжения поступает на выхолной конденсатор 11, минуя инерционный дроссель 1, и способствует поддержанию постоянного напряжения на выходе источника питания.
Динамический стабилизатор по схеме на фиг. 4 несколько проще, чем по схеме на фиг. 3, так как имеет всего лишь один мощный регулирующий транзистор в управляемом сопротивлении 4, однако схема на фиг. 3 позволяет лучше сглаживать переменную составляющую выходного напряжения источника питания. Для стабилизаторов на фиг. 3 и 4 в случае применения германиевых транзисторов в усилителях 12 и 13 зона нечувствительности достигает порядка ±0,1 В, Путем некоторого усложнения схемы можно еще уменьшить эту зону.
Динамические стабилизаторы способствуют более устойчивой работе источника питания. Их можно подключать непосредственно к нагрузке. В установившемся режиме динамический стабилизатор или не потребляет никакой мощности (если зона нечувствительности его больше величины амплитуды установивщейся пульсации источника питания), или потребляет незначительную мощность при работе в режиме ограничения установивщейся пульсации источника питания. Последний режим целесообразно применять при
низкой частоте работы источника питания (порядка 100-150 Гц) или при повышенных частотах (5-10 кГц и более).
Формула изобретения
Способ динамической стабилизации постоянного напряжения на выходе источника питания с инерционным последовательным органом, содержащим индуктивно-емкостный фильтр, путем дискретного введения на временных интервалах переходных процессов параллельно нагрузке и параллельно инерционному органу источника питания управляемого активного сопротивления и его непрерывного регулирования, отличаюшийс я тем, что, с целью уменьшения зоны нечувствительности динамической стабилизации и ограничения установившейся пульсации постоянного напряжения, контролируют мгновенные значения емкостного тока фильтра и управляемое активное сопротивление при введении параллельно нагрузке регулируют
8 обратной зависимости от зарядного тока, а при введении параллельно инерционному органу управляемое активное сопротивление регулируют в обратной зависимости от разрядного емкостного тока фильтра.

| название | год | авторы | номер документа |
|---|---|---|---|
| Импульсный стабилизатор напряжения | 1979 |
|
SU811235A1 |
| Импульсный стабилизатор постоянного напряжения | 1976 |
|
SU593207A2 |
| Импульсный стабилизатор напряжения | 1987 |
|
SU1508262A1 |
| Импульсный стабилизатор постоянного напряжения | 1987 |
|
SU1467542A1 |
| Преобразователь постоянного напряжения | 1984 |
|
SU1201983A1 |
| Ключевой стабилизатор постоянного напряжения | 1978 |
|
SU744512A1 |
| Непрерывно-импульсный стабилизатор напряжения | 1974 |
|
SU480065A1 |
| Импульсный стабилизатор напряжения постоянного тока | 1981 |
|
SU983679A1 |
| Импульсный стабилизатор напряжения | 1990 |
|
SU1721593A1 |
| Система стабильного электропитания | 1982 |
|
SU1065840A1 |