Изобретение касается интегратора для измерения телесных углов, который может найти применение, например, при решении гравиметрических и светотехнических задач.
В основу предлагаемого интегратора положены следующие теоретические предпосылки.
Телесный угол ц), под которым видна любая плоская поверхность из точки Р, совпадающей с началом координат, выражается в сферических координатах нижеследующим интегралом:
0) JJsmO ferfcp
причем интегрирование распростаняется на всю поверхность. Интегрируя по в, мы приводим этот интеграл к интегралу по контуру:
и ф rf ср Jsin О d в ( (1 - cos в) и о
причем здесь в и ср обозначают координаты контура заданной поверхности. Отсюда следует, что если полярная ось (6 0) проходит, внутри контура поверхности, то
2тс фсоз9й9,
О) .
а если вне, то
(О ф COS в d ср.
Предлагаемый интегратор дает величину
ф CCS в
по контуру плоской поверхности при условии, что полярная ось (0 0) перпендикулярна к этой поверхности.
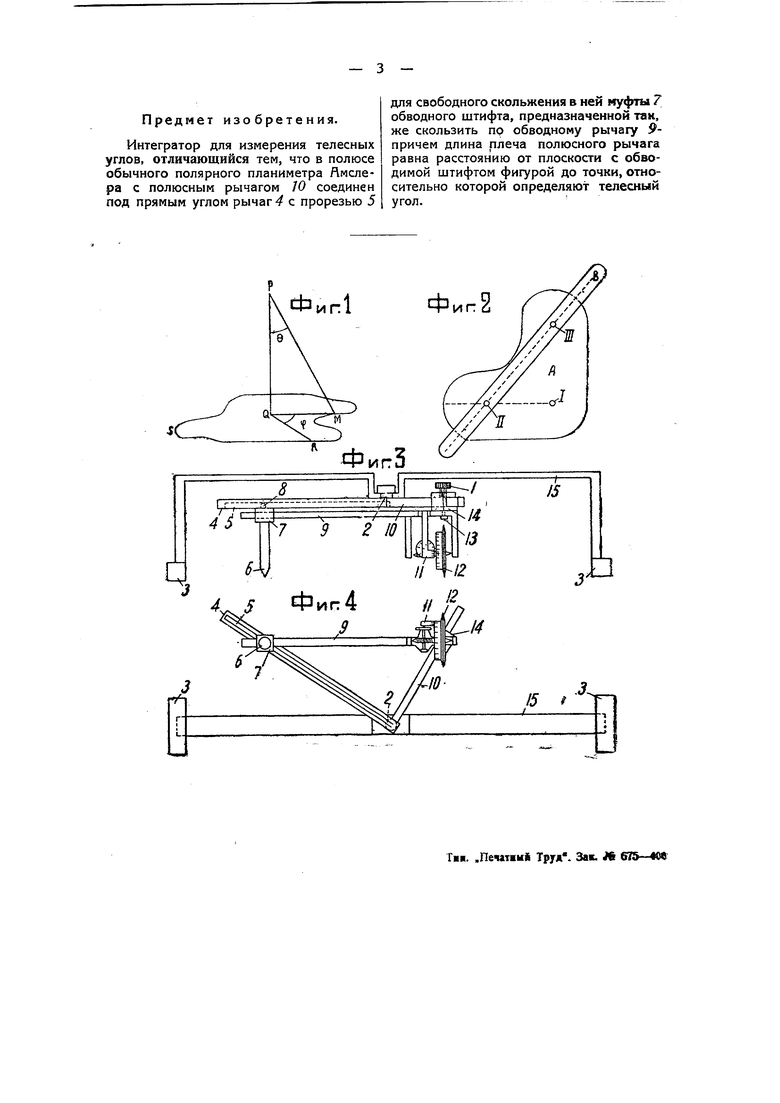
На чертеже фиг. 1 изображает сферические координаты поверхности, видимой из тОчки, относительно которой желают определить телесный угол; фиг. 2-элементарную схему механизма интегратора; фиг. 3 - вид интегратора сбоку; фиг. 4-вид интегратора снизу.
Предлагаемый интегратор построен по схеме, заключающей в себе элемент Л, (фиг. 2), могущий поворачиваться вокруг неподвижной оси /, и элемент В, шарнирно соединенный с элементом А в двух точках таким образом, что одна точка // может перемещаться относительно элемента А, а другая /// - относительно элемента В.
В конструктивном отнощении интегратор состоит из мостика /5, трех рычагов 4, 9 и W, прямоугольного сечения обводного штифта 6, двух муфт 7 и / и колесика 12 со счетным механизмом //. Мостик /5 на двух массивных ножках 5 имеет посредине пониженную часть с отверстием, в котором вращается вертикальная ось 2. Ось 2 несет на себе горизонтальные рычаги 4 и W, которые
«аппухо соединены перпендикулярно друг к другу и из коих второй соответ твует полюсному рычагу обычного планиметра Ямслера.
По рычагу Ю может передаваться муфта 14, которая закрепляется в своем положении винтом /, Муфта 14 снизу снабжена вертикальной осью 13, на которой может поворачиваться горизонтальный рычаг 9, соответствующий обводному рычагу в планиметре Ллклерз,
По рычагу 9 свободно скользит хорошо пригнанная муфта 7, которая несет на себе внизу вертикальный обводной штифт б, а сверху имеет вертикальный палец 5, передвигающийся в пазу 5, вырезанном вдопь всей нижней поверхности рычага 4. На рычаге 9, как раз под осью J3, укреплено коле-сико 12 с горизонтальной осью, связанное со счетным механизмом //. Колесико и счетный механизм могут быть в точности подобны таковым в обычном планиметре и потому здесь не описываются. Счетный механизм должен указывать длину дуги, на которую повернулся обод колесика 12.
На рычаге 10 должны быть нанесены деления, по которым можно было бы легко определять расстояние оси 13 от оси 2.
В конструкции прибора допустимы следующие изменения:
1.Рычаг 10 может быть наглухо соединен с осью 13, но тогда он должен передвигаться в муфте, соединенной с осью 2.
2.Рычаг 9 может быть наглухо соединен с муфтой 7, но тогда он должен передвигаться в муфте, вращающейся на оси 13, и колесико 12 должно быть присоединено к этой муфте, а не к рычагу 9.
3.Рычаг 4 может быть шарнирно соединен с муфтой 7, но тогда он должен передвигаться в муфте, соединенной с осью 2.
4.Взамен муфт или пальца 8 могут быть применены другие направляющие.
5.Колесико 12 может быть вынесено -из-под оси 13 в любом направлении, лищь бы соблюдалось условие б (см. ниже).
6.Колесико /2 и счетный механизм // можно совсем не устанавливать, а взамен этого приставить к интегратору
обыкновенный планиметр, присоединив обводный штифт планиметра к какой-либо точке рычага 9 (или его продолжения), достаточно удаленной от оси 13 (несовместимо с изменением 2),
При постройке интегратора должны быть строго соблюдены нижеследующие условия:
а)острие штифта 6, ось пальца 8 и ось 2 должны всегда быть в одной вертикальной плоскости, перпендикулярной к вертикальной плоскости, проходящей через ось 2 и ось /3.
б)Ось колесика /3 должна быть горизонтальной и всегда параллельной вертикальной плоскости, проходящей через ось /J и острие штифта б.
Чтобы определить телесный угол, под которым видна плоская поверхность S из точки Р (фиг. 1), необходимо иметь чертеж контура поверхности 5, на котором была бы обозначена точка Q, изображающая проекцию точки Р на плоскость S. Мостик /5 устанавливают над чертежом так, чтобы центр оси 2 пришелся как раз над точкой С. Муфту 74 закрепляют винтом / так, чтобы расстояние между осями 2 я 13 соответствовало в масштабе чертежа расстоянию точки Р от плоскости S. Обводной штифт 6 устанавливают в какойлибо точке R на контуре S и затем весь контур обводят штифтом б до возвращения в исходную точку R. Разность отсчетов счетного механизма до и после обвода, деленная на длину h, дает величину интеграла
ж cos в .
Как указано выше, если точка Q лежит вне контура S, то этот интеграл дает как раз величину искомого телесного угла, если же точка Q находится внутри контура S, то полученную величину надо вычесть из 2-.
Для вычисления вертикальной составляющей силы тяжести определяют телесный угол, под которым видна из данной точки площадь, охватываемая каждой горизонталью (что можно сделать, не сдвигая мостик 15 с раз установленного положения), и сумма результатов умножается на величину KaD, где К- гравитационная постоянная, а-заложение горизонталей и /Р - плотность тела.
предмет изобретения.
Интегратор для измерения телесных углов, отличающийся тем, что в полюсе обычного полярного планиметра Лмслера с полюсным рычагом /О соединен под прямым углом рычаг 4 с прорезью 5
для свободного скольжения в ней муфты 7 обводного штифта, предназначенной так, же скользить пр обводному рычагу 9причем длина плеча полюсного рычага равна расстоянию от плоскости с обводимой штифтом фигурой до точки, относительно которой определяют телесный угол.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интегратор | 1938 |
|
SU56663A2 |
| Устройство планиметра системы Коради, Амслера и т.п. | 1931 |
|
SU24969A1 |
| Прибор для вычисления освещенности от светящихся поверхностей произвольной формы | 1936 |
|
SU50669A1 |
| РАДИАЛЬНЫЙ ПЛАНИМЕТР | 1999 |
|
RU2171448C2 |
| Интегратор | 1949 |
|
SU93267A1 |
| РАДИАЛЬНЫЙ ПЛАНИМЕТР | 2005 |
|
RU2292524C1 |
| Планиметр для измерения площадей на топографической карте | 1990 |
|
SU1762106A1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ПЛОЩАДЕЙ И ПЕРИМЕТРОВ ЗЕРЕН В ПРЕПАРАТАХ ПОД МИКРОСКОПОМ | 1940 |
|
SU102678A1 |
| Полярный компенсационный планиметр | 1929 |
|
SU17763A1 |
| Планиметр | 1930 |
|
SU18407A1 |
Фиг1
Фиг2
ФигЗ

