1
1-1зобретение относится к области автоматического регулирования впрыска топлива и может быть .применено во всех типах двигателей с впрыском топлива, имеющих принудительное воспламенение заряда.
Р1звестеп адаптивный регулятор состава смеси двигателя с прииудительным зажиганием, содержащий датчик давления, подключенный к первому входу сумматора, выход которого подключен к исполнительному мехаНИЗМу.
С целью повышения быстродействия и точности работы регулятора в предлагаемое устройство введены носледовательно соединенные датчик углового ускорения, блоки деления, форм 1рования уиравляющего сигиала, логическое ycTpoiicTBO, последовательно соединенные датчик полного газа и блок коммутации и динамический преобразователь разрежения, выходы которого подсоединены к вторым входам сумматора и блока коммутации, выходы которого подключены к входу блока формирования управляющего сигнала, выходам блока деления п датчика углового ускорения, а второй вход блока деления нодключен к выходу датчика давления.
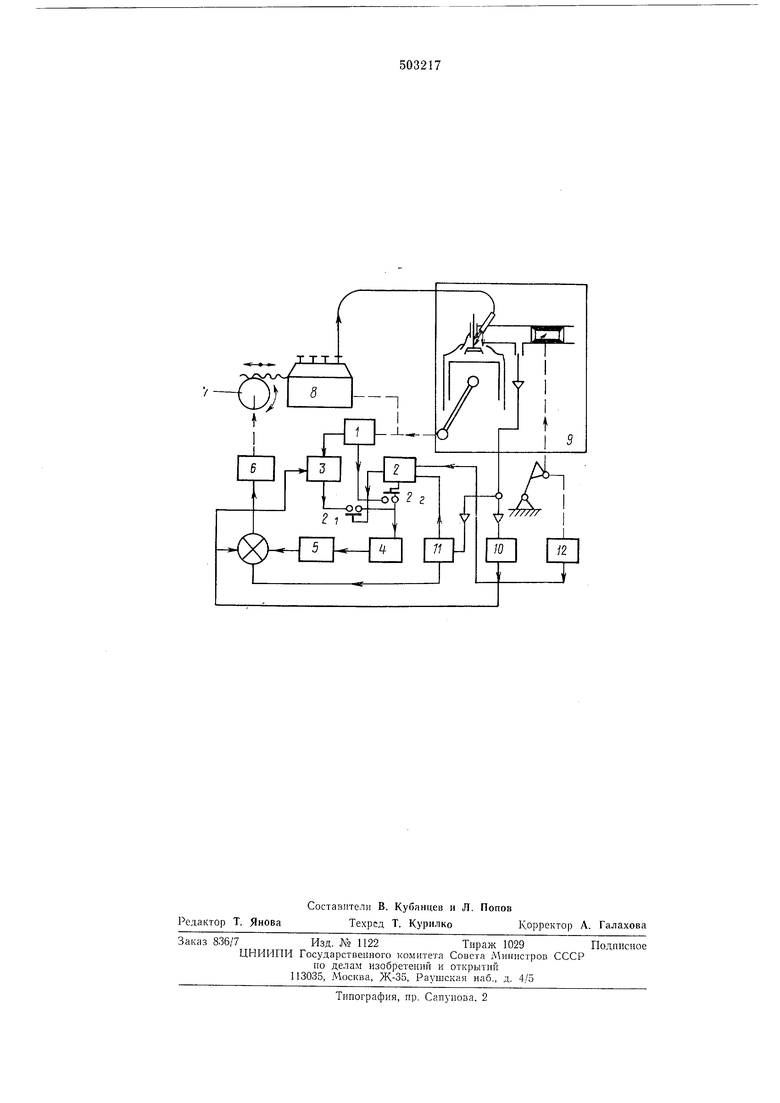
На чертеже показана структурная схема предлагаемого устройства.
Адантивньп регулятор содержит датчик 1 углового ускорения, связанны с коленчатым
2
валом двигателя, блок 2 коммутации с нор.мально замкнутым контактол 2) и нормально разомкнутым контактом 29, блок 3 деления, блок 4 формирования управляющего сигнала, логическое устройство 5, исполнительный механизм 6 с суммирующил входом, шестерня с рейкой 7 топливного насоса, топливный насос 8, цилиндр двигателя 9 с всасывающим патрубком, датчик 10 давления, дппамически преобразователь 11 разрежения п датчик 12 полного газа.
Адаптивный регулятор работает следующим образом.
13 рассматриваемый момент времени дроссельная заслонка открывается, при этом двигатель при Прочих равных условиях развивает избыточную мощность, которая затрачивается на увеличение углового ускорения коленчатого вала, а логическое устройство 5 формирует поисковый сигнал, умсньшающш подачу топлива. Динамический преобразователь 11 разрежения выдает сигнал на срабатывание блока 2 коммутации, обесиечивающего иодключение датчика 1 углового ускореиия к блоку 4 формирования управляющего сигиала через нормально разомкнутый контакт 2 и отключение выхода блока 3 деления от входа блока 4 формирования, псследни выдает сигнал, иропорциоиальный сумме трех величии: углового ускорения, производной от углового ускорения п HeKOTopOifo постоянного напряжения U(i, величина которого выбирается из условий оптимальной частоты переключения при движении автомобиля с постоянной скоростью и заданной потери па поиск.
Логическое устройство 5 вырабатывает сигнал управления исполнительным механизмом, величи.па и длительность TI которого пропорциональны величине выходного сигнала блока формирования.
Длительность п «е Превышает некоторого зиачеиия Тмакс В конце промежутка времени TI координата рейки 7 тоиливного насоса 8 равна Xi, что соответствует расходу топлива GI, несколько меньшему по сравнению с раходом топлива GO, задаваемым разомкнутым контуром, при этом мощность двигателя несколько уменьшается.
По истечении времени TI полярность выходного сигнала логического устройства 5 .изменяется на обратную, в результате чего исполнительный механизм 6 перемеш,ает рейку 7 топливного насоса 8 в противоположном направлении, т. е. увеличивает подачу топлива. Если это соответствует приближению состава смеси к оптимальному, то мощность двигателя возрастает, выходной сигнал датчика 1 и блока 4 формирования увеличивается, что приводит также к увеличению величины и длительности выходного сигнала логического устройства 5. В конце промежутка времени координата рейки 7 топливного насоса 8 составляет Х при расходе гонлива , в результате чего смесь становится богаче. Затем цикл работы повторяется.
За несколько циклов колебаний подачи топлива устанавливается состав смеси, обеспечивающий получение максимально возможной мощности в данных условиях работы. По мере приближения к установившемуся значению скорости сигнал с динамического нреобразователя П разрежения уменьшается до некоторого порогового значения, коммутатор вновь размыкает контакт 22. С выхода блока 3 деления поступает сигнал, иронорциональный отношению ускорения к расходу тонлива. Блок 4 формирует сигнал, пропорциональный сумме трех сигналов: отношения ускорения краеходу, производной от этого отношения и постоянного напряжения UQ. Адаптивный контур начинает отыскивать значение состава рабочей смеси, соответствующее максимальному значению к. н. д. двигателя.
При торможении автомобиля динамический преобразователь 11 разрежения выдает сигнал разной полярности, что приводит к уменьИ1еии10 или увеличению суммарного сигнала
управления исполнительным механизмом 6 и одновременному обесточиванию унравляющей цени блока 2 коммутации. Если блок 2 коммутации находится в обесточенном состоянии, т. е. нормально замкнутый контакт 2i замкнут,
то сигнал с динамического преобразователя 11 разрежения подтверждает замкнутое состояние контакта 2. Адаптивный контур, как и в случает движения автомобиля с постоянной скоростью, отыскивает состав смеси, соответствуюп 1,ий максимальному значению к. п. д. двигателя. В положет ин иолного открытия дроссельной заслонки с датчика 12 полного газа поступает сигнал на блок 2 коммутации, который, как и в случае разгона, замыкает нормально разомкнутый контакт 2, обеспечивающий поиск мощностного состава смеси.
Таким образом, адаптивный контур позволяет получить состав смеси, обеспечивающий максимальную мощность нри разгоне автомобиля и полном открытии дроссельной заслонки и максимальное значение к. п. д. при движении автомобиля с постоянной 1скоростью на режимах частичных нагрузок и торможении. В первый момент при торможенли динамичеслий преобразователь 11 разрежения способствует обеднению смеси.
Формула изобретения
Адантнвный регулятор состава смеси двигателя с принудительным зажиганием, содержащий датчик давления, подключенный к первом входу сумматора, выход которого подключен к исполнительному механизму, отличающийся тем, что, с целью повышения
точности и быстродействия регулятора, в него введены последовательно соединенные датчи углового ускорения, блоки деления, формирования управляющего сигнала, логическое устройство, последовательно соединенные датчик полного газа и блок коммутации и динамический преобразователь разрежения, выходы которого подсоединены к вторым входам сумматора -и блока коммутации, выходы которого подключены ко входу блока формирования управляющего сигнала, выходам блока деления и датчика углового ускорения, а второй вход блока деления подключен к выходу датчика давления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРИРАБОТКИ ПОРШНЕВОГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2157515C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ СИНХРОННЫМ ДИЗЕЛЬ-ГЕНЕРАТОРОМ | 2011 |
|
RU2488708C2 |
| Устройство для контроля загрузки двигателя внутреннего сгорания | 1990 |
|
SU1765736A1 |
| РЕГУЛЯТОР СКОРОСТИ ТРАНСПОРТНОЙ МАШИНЫ | 1991 |
|
RU2027615C1 |
| Система для испытания транспортных средств на топливную экономичность | 1985 |
|
SU1587367A1 |
| Двухимпульсный регулятор угловой скорости | 1980 |
|
SU954962A1 |
| Система автоматического управления дизелем | 1989 |
|
SU1740733A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182086C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 1992 |
|
RU2011563C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ НАДДУВОЧНОГО ВОЗДУХА ДИЗЕЛЬ-ГЕНЕРАТОРА В ДИНАМИЧЕСКИХ РЕЖИМАХ | 2015 |
|
RU2637793C2 |