Изобретение относится к области транспортных средств, в частности к железнодорожному транспорту, и может использоваться, например, для автоматического регулирования скорости движения тепловозов с электрической передачей, работающих в качестве тяговой единицы.
Известен способ объединенного автоматического регулирования силовой установки тепловоза с электропередачей, при котором задание мощностного режима осуществляется пропорционально угловой скорости вращения двигателя [1]. Общим недостатком такого способа является увеличение показателя дымности выхлопа, тепловые перегрузки, увеличение времени переходного процесса, снижение индикаторного к.п.д. двигателя и ряд других. При этом в лучшем случае приемистость дизель-генератора не превышает 30 кВт/с. Попытки интенсифицировать переходный процесс ведут к еще большему ухудшению указанных показателей. Устройство, с помощью которого реализуется этот способ, выполняется на базе гидромеханического регулятора частоты вращения, дополненного датчиком давления наддувочного воздуха и специальным механизмом регулирования мощности тягового генератора в виде золотника, гидравлического усилителя и индуктивного датчика регулятора тока возбуждения тягового генератора. По такому принципу устроены широко известные отечественные регулятора 4-7РС-2, а также регуляторы фирмы "WOODWARD". Устройства этого типа не учитывают целый ряд других важных параметров силовой установки и не могут обеспечить оптимального регулирования.
Известен способ автоматического регулирования скорости движения тепловоза с электрической передачей с помощью электронного блока управления, сопряженного с гидромеханическим регулятором частоты вращения [2], при котором электронный блок измеряет текущее значение скорости движения и сравнивает его с заданным. Полученная разность используется как квазистационарный режим на некотором отрезке времени движения и по этому показателю устанавливается позиция регулятора частоты вращения дизеля. Изменение нагрузки дизеля регулятор производит по нагрузочной регуляторной характеристике. Такой способ управления не позволяет существенно повысить к.п.д. установки, а следовательно, и улучшить ее экономичность. Устройство для реализации этого способа управления скоростью движения представляет из себя электронный блок, который с помощью датчиков учитывает большее число параметров, производит вычислительные операции и определяет ту позицию задания скоростного режима дизеля, которая на данном этапе наиболее приближена к оптимальной. Устройство выполнено на операционных усилителях и содержит сумматоры, блоки коррекции, усилители, пороговые элементы, блоки умножения, датчики и задатчик, которые с помощью аналого-цифрового преобразователя и коммутатора сопряжены с гидромеханическим регулятором частоты вращения и системой регулирования тока возбуждения тягового генератора. К недостаткам устройства следует отнести использование аналоговых электронных элементов, температурная стабильность которых не отвечает современным требованиям по эксплуатационной надежности, и использования гидромеханических регуляторов частоты вращения, которые не в состоянии обеспечить высокую точность поддержания заданного скоростного режима и минимизировать параметры переходного процесса.
Известен также более современный способ регулирования силовой установки тепловозов, направленный на улучшение качества переходных процессов в дизеле при помощи микропроцессорной техники [3]. По этому способу при переходных процессах выдерживаются на фиксированном уровне параметры рабочего процесса дизеля, например коэффициент избытка воздуха. Это дает возможность существенно снизить дымность выхлопа, правильно выбрать величину углового ускорения коленчатого вала дизеля и улучшить качество переходного процесса. Но в то же время алгоритм управления нагрузкой дизеля сохраняется прежним, т.е. по нагрузочным характеристикам, что не позволяет получить оптимальную тепловозную характеристику. Цифровой электронный блок управления подачей топлива сопряжен с механической системой управления мощностью тягового генератора, что не позволяет достичь высокой точности и качества управления тягой. Устройство при этом выполнено и реализовано на базе микроЭВМ, т.е. все операции измерения и вычисления производятся в цифровом виде. Это повышает стабильность работы и точность поддержания режимов. Устройство включает целый комплекс преобразователей для измерения частоты вращения, давления наддува, скорости движения, абсолютного давления воздуха, тока тяговых двигателей и т.д. Это повышает стабильность работы и надежность системы управления, но сопряжение цифрового микропроцессора с механической системой управления тягой не позволяет в полной мере реализовать процесс оптимального управления силовой установкой тепловоза, адаптивной к выполняемым поездным операциям по условию минимизации расхода топлива при заданной производительности.
Целью изобретения является увеличение к.п.д. тягового средства (тепловоза), стабилизация теплового режима силовой установки, улучшение тяговых качеств.
Указанная цель достигается путем непрерывного контроля параметров силовой установки и рабочего процесса дизеля и оптимизации управления режимом работы силовой установки, путем применения метода перекрестного управления, когда в переходном режиме регулятор частоты вращения сначала воздействует на ток возбуждения тягового генератора, а регулятор мощности на цикловую подачу, а затем, после выхода на новый заданный режим, регуляторы меняются местами.
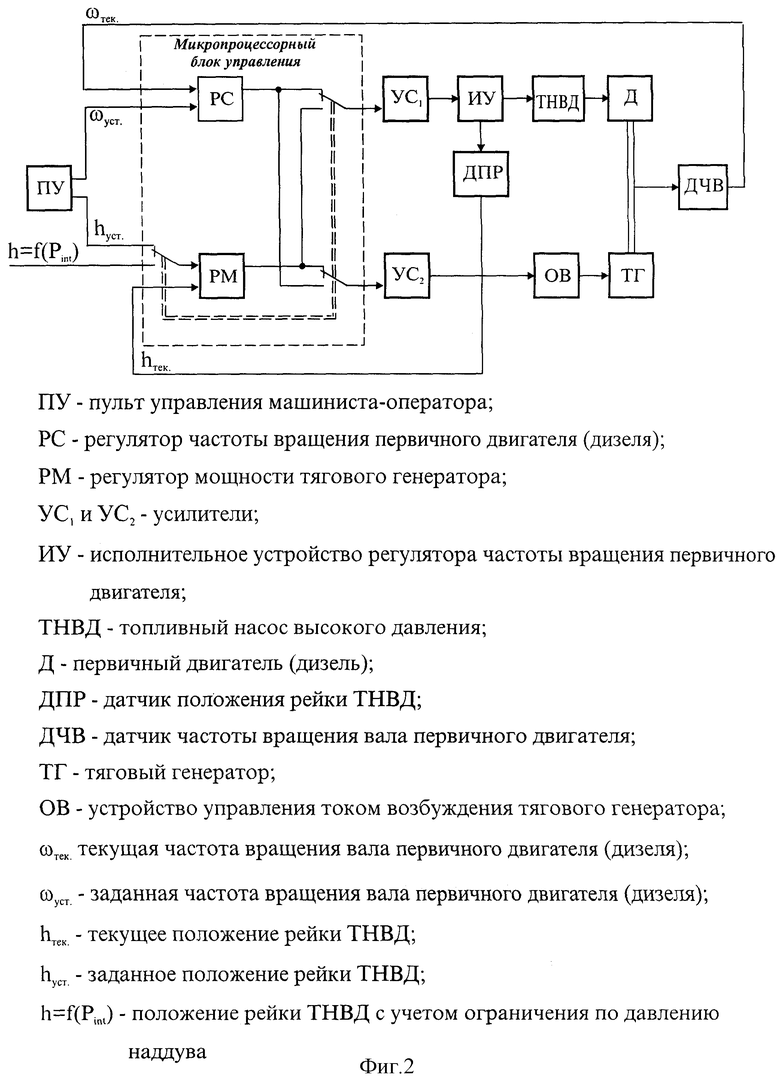
Структурная блок-схема силовой установки транспортного средства с предлагаемым устройством для управления его работой представлена на фиг. 1.
Устройство содержит микропроцессорный блок управления (1), исполнительное устройство регулятора частоты вращения (23) для привода рейки топливного насоса высокого давления, датчик положения рейки топливного насоса высокого давления (3), датчик скорости движения транспортного средства (12), датчик буксования (9), датчик тока тягового генератора (13), датчик напряжения тягового генератора (14), датчик частоты вращения ротора турбокомпрессора (15), датчик частоты вращения вала первичного двигателя (16), датчик давления масла в двигателе (17), датчик температуры масла в двигателе (18), датчик температуры охлаждающей жидкости в двигателе (19), датчик давления охлаждающей жидкости (20), датчик температуры наддувочного воздуха (21), датчик барометрического давления (22) и пульт управления устройством, например пульт управления машиниста-оператора (2).
Кроме этого на фиг. 1 показан первичный двигатель, например дизель (4), турбокомпрессор (7), тяговый генератор (5), источник питания возбуждения тягового генератора (6), тяговые двигатели (11) с сигнализаторами аварийного отключения (8) и поездные контакторы (10). Микропроцессорный блок управления (1) имеет канал приема задания по скорости при дистанционном управлении движением и специальный информационный выход для подключения линии передачи сигналов.
Эта линия предназначена для объединения в единую систему аналогичных систем управления двух и более транспортных средств, например секций магистрального тепловоза, для выполнения поездной работы, которая будет управляться с пульта управления машиниста-оператора ведущей секции (2).
Заявляемый способ управления работой транспортного средства реализуется следующим образом.
При изменении скоростного режима движения, например поезда, в работе силовой установки тепловоза возникает переходный процесс. Задание нового скоростного режима осуществляет машинист-оператор с пульта управления устройством (2). При осуществлении переходного процесса в его начальный период задается максимальное ускорение частоты вращения вала дизеля путем соответствующего перемещения органа топливоподачи, при этом микропроцессорный блок управления (1) рассчитывает приращение цикловой подачи по данным датчика частоты вращения ротора турбокомпрессора и положения органа топливоподачи таким образом, чтобы коэффициент избытка воздуха был не менее 1,35 в зависимости от величины рассогласования между заданной и текущей скоростями движения поезда. Одновременно микропроцессорный блок управления устанавливает такой уровень нагрузки тягового генератора, который позволяет обеспечить требуемое ускорение частоты вращения вала дизеля. Благодаря тому, что выдерживается заданное высокое значение ускорения в начальный период переходного процесса, происходит быстрое нарастание оборотов ротора турбокомпрессора и, следовательно, давления наддувочного воздуха, а в соответствии с требуемым значением коэффициента избытка воздуха микропроцессорный блок управления наращивает цикловую подачу. Это существенно сокращает время переходного процесса, т.к. переводит дизель в режим максимально возможной загрузки, но с обеспечением минимального уровня дымления. Для достижения этого используют способ перекрестного управления, т.е. регулятор частоты вращения поддерживает заданное ускорение частоты вращения вала дизеля, воздействуя на ток возбуждения тягового генератора, а регулятор мощности тягового генератора управляет рейкой топливного насоса высокого давления.
Этот способ поясняется фиг. 2. В результате такого управления положение рейки строго соответствует наперед заданной ограничительной характеристике дизеля, а поддержание заданного ускорения достигается разностью между полной мощностью дизеля и мощностью тяговой передачи.
По достижении заданной частоты вращения дизеля происходит автоматический возврат к схеме объединенного регулирования дизель-генераторов, т.е. регулятор частоты вращения поддерживает заданную частоту вращения дизеля путем воздействия на рейку топливного насоса высокого давления, а регулятор мощности воздействует на ток возбуждения тягового генератора, устанавливая необходимый уровень силы тяги.
В случае, если транспортное средство, например магистральный тепловоз, имеет две и более рабочие секции, оборудованные аналогичными устройствами управления работой и соединенные между собой линией передачи сигналов, способ их совместной работы основывается на принципе приоритетной загрузки ведущей секции. При достижении на ведущей секции частоты вращения вала дизеля и мощности до наперед заданной величины, например 0,8 от номинала, и при условии, что скорость движения поезда не достигла заданной, микропроцессорный блок управления ведущей секции по информационной линии передачи сигналов передает управление ведомой секции. По этой команде активизируется микропроцессорный блок управления ведомой секции и действует по способу, описанному выше, загружая дизель-генератор и добавляя силу тяги.
Как только дизель-генератор ведомой секции загрузился, до наперед заданной частоты вращения и мощности, обе секции начинают работать синхронно, но все дальнейшие команды задает микропроцессорный блок управления ведущей секции. В этом режиме возможна дальнейшая загрузка обеих секций до полной мощности, а следовательно, увеличение силы тяги, если этого требует рельеф пути, или увеличение скорости движения.
В случае, если уставка скорости с пульта управления машиниста-оператора (2) изменится в меньшую сторону, обе секции начинают разгружаться синхронно до определенного значения, например 0,8 от номинала, и при дальнейшем снижении задания скоростного режима или уменьшении сопротивления движению ведущая секция прекращает разгрузку, а ведомая разгружается до минимальной частоты вращения. Микропроцессорный блок управления ведомой секции по информационной линии передачи сигналов сообщает микропроцессорному блоку управления ведущей секции, что минимальная частота вращения достигнута и ведомая секция переходит в режим ожидания, а поезд ведет только ведущая секция, работающая по описанному выше способу.
Заявляемый способ управления работой предусматривает использование ряда защитных функций, по которым микропроцессорный блок управления производит корректировку работы силовой установки транспортного средства. Коррекция производится по заданной мощности, по ограничению подачи топлива в функции наддува, по номинальной частоте вращения коленчатого вала дизеля, по температуре наддувочного воздуха, по температуре охлаждающей жидкости, по температуре масла в системе смазки дизеля, по давлению масла в системе смазки дизеля, по барометрическому давлению, по критическим оборотам ротора турбокомпрессора и другим параметрам дизеля и силовой передачи.
Для повышения надежности системы управления работой транспортного средства способ предусматривает два режима ее функционирования - основной и резервный. Основной режим заключается в поддержании оптимального режима движения транспортного средства с обеспечением неравномерной загрузки по секциям, если таковые имеются в его составе. Резервный режим предусматривает объединенное регулирование дизель-генератора по частоте вращения дизеля и нагрузке генератора традиционным способом. Переход с основного режима на резервный происходит автоматически при наличии сбоев в работе, причем информация об этом передается на пульт управления машиниста-оператора (2).
Таким образом, реализация заявляемого способа с помощью предлагаемого устройства позволяет оптимизировать работу силовой установки, снизить эксплуатационный расход топлива, улучшить экологические параметры транспортного средства и существенно уменьшить нагрузку на машиниста-оператора.
Источники информации
1. Филонов С.П. и др. Тепловоз 2ТЭ116. - М.: Транспорт, 1977, с. 320.
2. Баранов А. А. и др. Устройство для автоматического регулирования скорости тепловоза с электрической передачей. Авторское свидетельство СССР 1009831 от 30.10.1980 г.
3. Коссов Е. Е., Сухопаров С.И. Оптимизация режимов работы тепловозных дизель-генераторов. М. ИНТЕКСТ, 1999, с. 141-142.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ ТОПЛИВОПОДАЧЕЙ ДИЗЕЛЯ | 2000 |
|
RU2199676C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ КОЛЕНЧАТОГО ВАЛА ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1999 |
|
RU2168647C1 |
| СПОСОБ КОРРЕКЦИИ ЗАПАЛЬНОЙ ДОЗЫ ДИЗЕЛЬНОГО ТОПЛИВА В ДИЗЕЛЯХ, РАБОТАЮЩИХ ПО ГАЗОДИЗЕЛЬНОМУ ПРОЦЕССУ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182249C2 |
| СПОСОБ УПРАВЛЕНИЯ ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ ЛОКОМОТИВА И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2534466C1 |
| ЭЛЕКТРОМАГНИТНОЕ ИСПОЛНИТЕЛЬНОЕ УСТРОЙСТВО С КРЕСТООБРАЗНЫМ ПРУЖИННЫМ ШАРНИРОМ | 2008 |
|
RU2390817C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ МОЩНОСТИ ТЯГОВОГО ГЕНЕРАТОРА ТЕПЛОВОЗА | 2011 |
|
RU2466039C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2001 |
|
RU2205114C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2010 |
|
RU2423251C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗА | 2006 |
|
RU2300470C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ПЕРЕДАЧИ ТЕПЛОВОЗОВ | 2000 |
|
RU2174919C1 |
Изобретение относится к железнодорожному транспорту и предназначено для использования на тепловозах и большегрузных автомобилях, оборудованных электрической силовой передачей. Предложенный способ основан на измерении ускорения движения, учете параметров рабочего процесса двигателя и параметров силовой передачи и позволяет оптимизировать работу транспортного средства при движении. Устройство для реализации способа представляет собой микропроцессорный блок управления, работающий с датчиками первичной информации и управляющий органом топливоподачи и возбуждением тягового генератора по заданному алгоритму. Имеется возможность совместной работы двух и более однотипных транспортных средств в составе единой тяговой единицы. Данное техническое решение обеспечивает минимальные параметры дымности выхлопа и существенную экономию путевого расхода топлива. 2 с. и 11 з.п.ф-лы, 2 ил.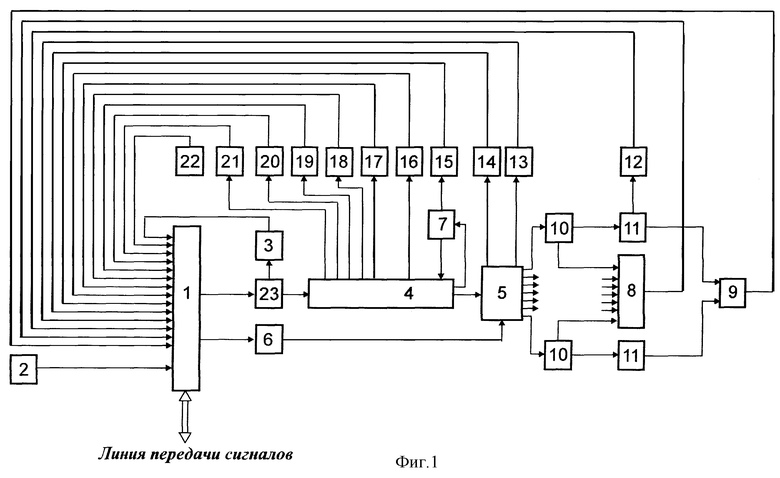
| Коссов Е.Е | |||
| и др | |||
| Оптимизация режимов работы тепловозных дизель-генераторов | |||
| - М.: ИНТЕКСТ, 1999, с.141-142 | |||
| Устройство для автоматического управления дизель-генераторной установкой тепловоза | 1988 |
|
SU1564017A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ;:ПОЕЗДОМI .(,.,U.. | 0 |
|
SU190405A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СКОРОСТИ ТЕПЛОВОЗА | 0 |
|
SU206633A1 |
| DE 19823348 A1, 25.11.1999 | |||
| US 3800139 A, 26.03.1974. | |||
