жений соответствуют нормальной и пониженной уставкам пускового ускорения моторного вагона.
На каждую группу электродвигателей 1 (2) предусмотрен датчик 24 (25) напряжения, который выполнен, например, в виде потенциометра 26 (27), подключенного параллельно тиристорному импульсному прерывателю 9 (10). Выходы с датчиков 24 и 25 соединены со входами двух элементов 28, 29 сравнения реализующих операцию алгебраического суммирования средних значений входных сигналов. Выходы d элементов сравнения 28 и 29 соединены с пороговыми элементами 30 и 31, которые через логические элементы «И 32 и 33 воздействуют на ключевые элементы 34 и 35. В качестве примера на фиг. 1 показан простейший ключевой элемент с контактом 36 (37), включенным параллельно выходу инерционного звена il6 (17). Другие входы логических элементов «И 32 и 33 соединены с выходами одновибраторов 38 и 39, входы которых присоединены к выходам пороговых элементов 30 и 31.
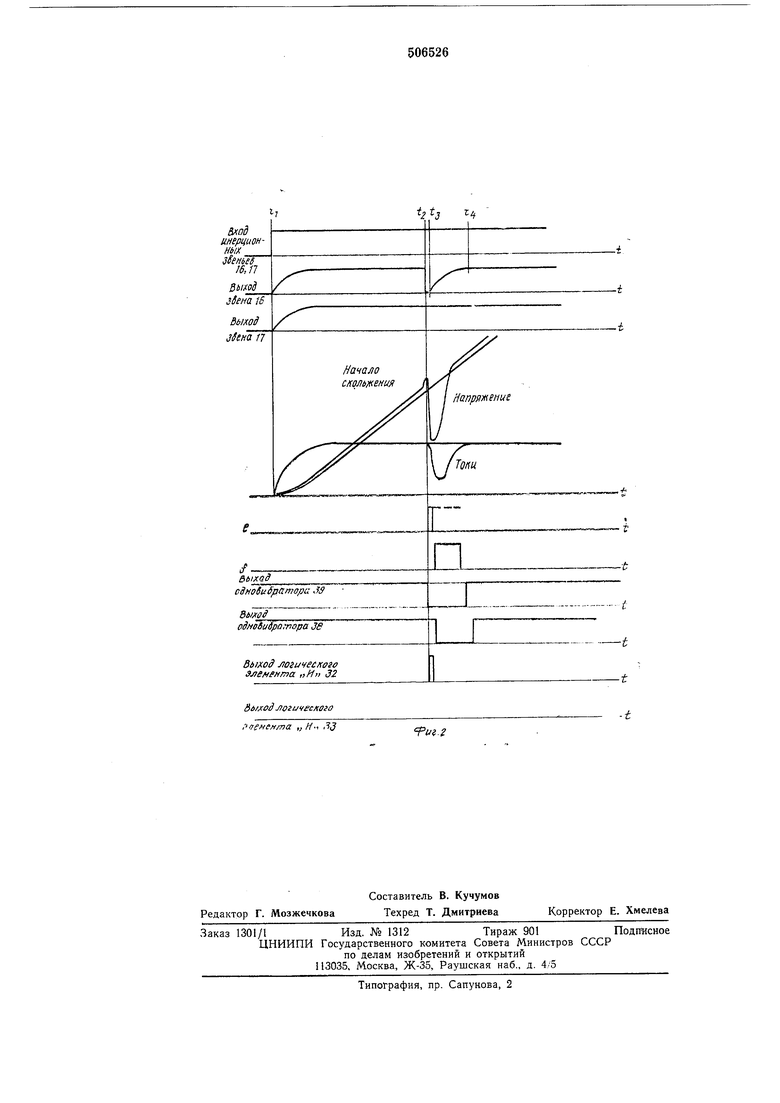
Устройство работает следующим образом (см. фиг. 2).
Перед пуском моторного вагона (до момента времени i) переключатель 22 находится в нейтральном положении, сигнал на выходе и входе инерционного звена 16 (17) равен нулю. На входе в блока 14 (15) имеем тоже нулевой сигнал, в соответствии с которым этот блок не включает тиристорный импульсный прерыватель 9 (10), так что ток электродвигателя 1 (2) равен нулю, и все напряжение источника 11 питания приложено к тиристорному импульсному прерывателю 9 (10).
В момент времени /i включают переключатель 22, в результате чего на входе инерционного звена 16 (17) появляется напряжение задатчика 23 тока величиной 100 В или 65 В, а на выходе этого звена напряжение нарастает постепенно по экспоненциальной кривой, так как заряд конденсатора 18 (19) происходит через резистор 20 (21) с постоянной времени Т, величина которой выбрана так, чтобы при трогании вагона не было резкого толчка силы тяги, т. е. чтобы скорость нарастания ускорения не превысила 0,6- 0,7 м/сек. В соответствии с указанной экспоненциальной кривой изменения напряжения на входе в блока 14 (15) последний включает тиристорный импульсный прерыватель 9 (10) и с его помощью регулирует фактический ток электродвигателя 1 (2) так, чтобы его фактическое значение, т. е. сигнал на входе а блока 14 (15), соответствовало заданному значению на входе е этого же блока.
При этом тиристорные импульсные прерыватели 9 и 10 работают с одинаковой частотой и со сдвигом в полпериода. В обоих электродвигателях 1 и 2 ток нарастает одинаково но коэффициенты заполнения тиристорных импульсных прерывателей 9 и 10 могут из-за разбоося характеристик двигателей несколько
отличаться друг от друга. Это расхождение учитывается предварительной настройкой потенциометров 26 и 27, а также зоной нечувствительности пороговых элементов 30 и 31. Поэтому при нормальном сцеплении колес вагона с рельсами сигналы на выходе ей/ пороговых элементов 30 и 31 равны нулю, управляемые ими одновибраторы 39 и 38 находятся в невозбужденном состоянии. Поскольку со входами логических элементов «И 32 и 33 соединены нулевые выходы указанных одновибраторов 39 и 38, логические элементы «И 32 и 33 открыты. Однако на других их выходах имеются нулевые сигналы с выходов пороговых элементов 30 и 31. Поэтому на выходах логических элементов «И 32 и 33 напряжение равно нулю, вследствие чего ключевые элементы 34 и 35 выключены, а их контакты 36 и 37 разомкнуты. Таким образом, при нормальном сцеплении, т. е. до момента времени tz, защитные цепочки не влияют на работу устройства.
Если в момент времени 4 начинается проскальзывание одной из осей, связанной, например, с электродвигателем 1, то нротивоэ.д.с. этого электродвигателя скачкообразно возрастает, а ток его стремится уменьшиться. В результате этого блок 14 начинает увеличивать .коэффициент заполнения тиристорного импульсного прерывателя 9, вследствие чего напряжение на последнем уменьшается. Уменьшается также и сигнал на выходе с датчика 24, а рассогласование на выходе d элемента сравнения 28 увеличивается, приводя к срабатыванию порогового элемента 30, который своим выходным сигналом запускает одновибратор 38. При этом напряжение на выходе этого одновибратора 38 становится равным нулю на время б, на это время блокируется логический элемент «И 33.
Кроме того, напряжение с выхода е порогового элемента 30 поступает на логический элемент «И 32, который в момент времени ty, открыт напряжением с невозбужденного одновибратора 39. Поэтому на выходе логического элемента «И 32 появляется напряжение, которое включает ключевой элемент 34. Последний своим контактом 36 закорачивает конденсатор 18 в инерционном звене 16. При этом сигнал на входе в блока управления 14 становится равным нулю.
При уменьшении сигнала на входе в до нуля блок 14 управления резко снижает напряжение на электродвигателе 1, в результате чего сигнал на выходе с датчика 24 резко увеличивается, а сигнал на выходе е элемента 30 становится равным нулю, что приводит к выключению контакта 36 (момент времени з). Начиная с момента времени tz, напряжение на выходе инерционного звена 16 постепенно увеличивается до номинального значения, в результате чего блок 14 увеличивает напряжение на электродвигателе 1 и его ток до первоначального значения. Сцепление восстанавливается из-за резкого снижения тока и
силы тяги двигателя сразу после момента вращения 4.
Однако уменьшение напряжения на электродвигателе 1 приводит к появлению сигнала рассогласования на выходе d элемента 29 сравнения; срабатывает пороговый элемент 31. Но так как логический элемент «И 33 при этом заблокирован одновибратором 38, то его выходной сигнал остается равным нулю, и ток электродвигателя 2 не меняется. Для обеспечения работоспособности устройства необходимо, чтобы длительность б импульса одновнбраторов 38 и 39 была равна или больше трех постоянных времени инерционного звена 16 (17), т. е. .
В этом случае после восстановления номинального значения тока боксовавшего двигателя (момент времени 4) одновибраторы 38 и 39 снимают блокировку схем логических элементов «И 33 и 32, так что заш,итные цепочки снова включаются в работу. Так, если по каким-либо причинам сцеплепие не восстановилось, то описанный процесс понижения силы тяги боксуюш,его двигателя повторяется.
В режиме электрического торможения меняется только схема силовой части - собираются две независимые параллельные цепи рекуперативного или реостатного торможения. Соединение блоков системы управления остается тем же, при этом блоки 14 и 15 стабилизируют тормозной ток, а защитные цепочки реализуют защиту от юза путем кратковременного выключения проскальзывающего двигателя. При необходимости для режима торможения могут быть известным образом введены добавочные элементы, например блок ограничения межламельного напряжения.
10
Формула изобретения
Устройство для защиты от боксования моторного вагона постоянного тока, на котором тяговые электродвигатели и тиристорные импульсные прерыватели соединены в параллельные цепи, содержащее задатчики тока, подключенные через инерционные звенья к блокам управления тиристорными импульсными прерывателями, датчики напряжения на
тяговых электродвигателях и элементы сравнения, отличающееся тем, что, с целью повышения чувствительности, оно снабжено ключевыми элементами, выход каждого из которых присоединен параллельно выходу
инерционного звена, вход через один вход дополнительного логического элемента «И соединен с выходом одного элемента сравнения, а другой вход этого логического элемента «И соединен через дополнительный одновибратор
с выходом другого элемента сравнения.
г
/4
37, J
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля системы импульсного регулирования тяговых электродвигателей транспортного средства | 1985 |
|
SU1355509A1 |
| Вентильный электропривод | 1985 |
|
SU1277338A1 |
| Автоматическое устройство для дискретного управления компенсирующей установкой | 1983 |
|
SU1116494A1 |
| Электропривод транспортного средства | 1983 |
|
SU1430304A1 |
| Многодвигательный электропривод | 1984 |
|
SU1334349A1 |
| Устройство для управления компенсирующей установкой | 1982 |
|
SU1025001A1 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1984 |
|
SU1240649A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ГЕОМЕТРИЧЕСКИХ НЕРОВНОСТЕЙ КОЛЕСНЫХ ПАР ПОДВИЖНОГО СОСТАВА12 | 1973 |
|
SU384711A1 |
| Управляемый электропривод | 1984 |
|
SU1197031A1 |
| Устройство для регулирования тягового электродвигателя электроподвижного состава постоянного тока | 1980 |
|
SU912562A1 |

Г
( -J
2
1 I
21
2S
&хпд инерциониш
Звеньев 6,П
Вшод з1ена IS
Выход jfefioTT
Ч
i
Начало сколыкения
Напряжение
I I TOW
ЪыхиЗ
cSMoSuSpnmopa J
BMoi
рдмобийрйп ара J8
Выход логического элененггга „И 32
&6/j(oB логического
i47f f /7 a „H-: 33
- t
-t
fui.i
