Изобретение относится к электротехнике н может быть использовано для управления электродвигателями, работающими в общей технологической цени при питании от индивидуальных тиристорных преобразователей .
Цель изобретения - повышение надежности.
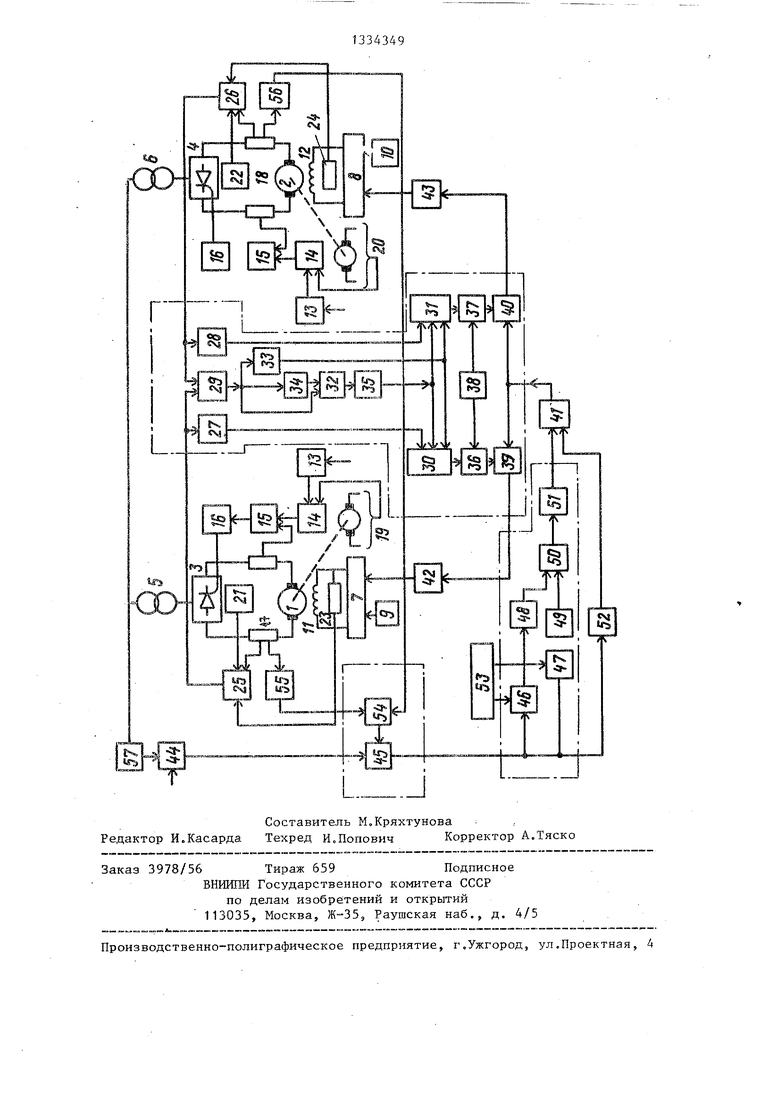
На чертеже представлена схема электропривода.Многодвигательный электропривод, содержит электродвигатели 1,и 2, подключенные через тиристорные преобразватели 3 и 4, трансформаторы 5 и 6 к сети переменного тока, регуляторы 7 и 8 возбуждения с задатчиками 9 и 10 подключенные к обмоткам 11 и 12 возбуждения электродвигателей 1 и 2.
Электропривод содержит также сист мы регулирования скорости, каждая из которых включает последовательно соединенные задатчик 13 интенсивности, регулятор 14 скорости, регулятор 15 тока и систему 16 импульсно-фазового управления, выход которой подключен- к входу соответствующего тиристорно- го преобразователя 3 (4), датчики 17 и 18 тока и датчики 19 и 20 скорости подклЕОченные к входам соответствующих регуляторов 14 и 15.
ВьЕсоды датчиков 21 и 22 напряже
ния, 17 и 18 тока, потока 23 и 24 соединены с входами вычислительных блоков 25 и 26, Выходы вычислительных блоков 25 и 26 подключены соответст- ренно к первомз и второму нелинейньм элементам 27 и 28 типа Sign cos и входам первого сумматора 29. Выходы нелинейных элементов 27 и 28 подключены к первым входам логических трехвходовых элементов И 30 и 31, t
Выход первого сумматора 29 соединен с первым входом второго суммато35
40
Многодвигательньм электропривод работает следующим образом,
Запуск электродвигателей 1 и 2 ос ществляется изменением напряжения на якоре. Регулирование тока и момента осуществляется с. помощью регулятора тока, скорости - с помощью регулятора 14 скорости. Вычислительные блоки 25 и 26 служат для определения значений углов управления, которые имеют системы привода при номинально потоке. Скорость электродвигателя 1
ра 32, с входом первого блока 33 опре-45 ° Работе определяется зависи- деления знака и через последовательно мостью
U), Ui--,
соединенные блок 34 квантования по уровню, второй сумматор 32 и второй блок 35 определения знака подключен
к вторым входам логических ТреХВХОДО- gg
вых элементов И 30 и 31.
Третьи входы элементов. И 30 и 31 объединены и подключены к выходу первого блока 33. Выходы элементов И 30 и 31 подключены соответственно к первым входам третьего и четвертого сумматоров 36 и 37, вторые входы которых соединены с блоком 38 смещения. Выхо- где R. ды третьего и четвертого сумматоров 36
2:i° -i- - -i 5ii
кТ-рТ При номинальном потоке
1/) :yi 2.2;iii.
R«
кф
55
Независимо от значения потока ско рость двигателя должна быть неизменной
. IdL, . - уI
. Кя ,
- сопротивление коммутации преобразователя;
и 37 соединены соответственно с первыми входами блоков 39 и 40 умноже0
д
5
0
5
0
ны к выходу пятого сумматора 41.
Выходы блоков 39 и 40 умножения подключены к входам регуляторов .42 и 43 гармоник. Выход фильтра 44 через первый ключевой элемент 45 подключен к входам второго и третьего ключевых элементов 46 и 47. Выходы второго и третьего ключевых элементов 46 и 47 через заполняющие устройства 48 и 49 подключены к входам шестого суммато- 5 ра 50.
Выход сумматора 50 через интегратор 51 подключен к первому входу пятого сумматора 41, второй вход которого через масштабный блок 52 подключен к выходу первого ключевого элемента 45. Управляющие входы второго и третьего ключевых элементов 46 и 47 подключены к генератору 53 управляющих напряжений.
Управляющий вход первого ключевого элемента 45 подключен к выходу логического элемента И 54, входы которого через пороговые элементы 55 и 56 соединены с датчиками 17 и 18 тока якоря электродвигателей 1 и 2. Вход фильтра 44 соединен с датчиком 57 тока сети.
Многодвигательньм электропривод работает следующим образом,
Запуск электродвигателей 1 и 2 осуществляется изменением напряжения на якоре. Регулирование тока и момента осуществляется с. помощью регулятора 15 тока, скорости - с помощью регулятора 14 скорости. Вычислительные блоки 25 и 26 служат для определения значений углов управления, которые имеют системы привода при номинальном потоке. Скорость электродвигателя 1
° Работе определяется зав стью
U), Ui--,
2:i° -i- - -i 5ii
кТ-рТ При номинальном потоке
1/) :yi 2.2;iii.
R«
кф
где R.
5
Независимо от значения потока скорость двигателя должна быть неизменной
. IdL, . - уI
. Кя ,
- сопротивление коммутации преобразователя;
3 1334349
Rji сопротивление якоря двига- Амплитуда выходного сигнала блотеля и сглаживающего дрос- ков 27, 28, 33, 35 соответствует уров- селя силовой цепи;ню сигнала логической единицы дискретUd m . максимальное значение выпрямленного напряжения пре- I образователя при«1- 0; углы управления преобразователя при потоках, отличном от номинального и при номинальном, соответственно;
кф - коэффициент момента двигателя при номинальном потоке;
f - относительный поток двигателя .
Из условия постоянства моментов можно также определить id,--f 4 . .
Предьщущее равенство преобразуется к виду
( - + ia,-RE,
g ных устройств управления.
I
Если токи якорей систем привода
превышают зону нечувствительности,установленную пороговыми элементами 55 10 и 56, то на выходе логического элемента И 54 будет единичный сигнал; если хотя бы один из пороговых элементов 55 и 56 имеет выходное напряжение, равное нулю, то выходное напряжение логи- 15 ческого элемента И 54 будет равно, нулю.
Логические трехвходовые элементы И 30 и 31 реализуют операцию логи- - ческого умножения
20 FsffSf (sin(n uc )) Sign(cosa() . Sign (U)j,
Третий и четвертый сумматоры 36 и 37 имеют два входа: один - с выхода логических элементов 30 и 31, а
где Rj, R, +R,i .
Значение угла при ,0,
ot; агссоз(У/ + I,
Аналогично определяется и значение ii
С помощью первого сумматора 29 определяется разность углов управления электроприводов (первого и второго) при номинальном потоке. Нелинейные блоки 27 и 28 определяют знаки и cosolj, т.е. режим работы преобразователей - вьшрямительный или инверторный.
С помощью блока 33 определяется знак разности углов управления 4oi. .
Блок 34 квантования по уровню, второй сумматор 32 и блок 35 реализуют математическую операцию
Ujj Sign sin(n do() .
второй - отрицательный - от блока 38 смещения, выход которого по амплитуде равен половине амплитуды выкодно-- го сигнала с злементов .Й. 30 и 31.. Таким образом, если на выходе логическо 0 го элемента И 30 имеется положительная единица, то на выходе третьего сумматора 36 - положительное напряжение, равное половине выходного напряжения с логического.элемента 30; если
35 на выходе элемента 30 - нулевой потен™ циал, то на выходе третьего сумматора 36 - отрицательное напряжение. Выходы третьего и четвертого сумматоров 36 и 37 соединены с первыми вхо40 дами блоков 39 и 40 умножения. Таким образом, осуществляется определение знака управляющего сигнала, поступающего на регуляторы гармоник 42 и 43 систем электроприводов с целью учета
45 взаимного расположения векторов гармоник тока первого и второго преобразователей при изменении их углов уп- Уровень квантования блока 34 зави- равления.
сит от параметра п. Единичный скачок Трансформатор тока, представляющий в выходной кривой квантования в связи 50 собой датчик 57 тока сети совместно с этим равен4Л Г/п, а п может прини- с фильтром 44 соответствующей гармо- мать значения ,7,11,13..., т.е. со- ники формируют сигнал, пропорциональ- ответствует порядку гармоник тока ный уровню п-й гармоники, например, преобразователей. Так как коэффициент 5-й. Сигнал с выхода фильтра 44 пре- усиления блока 41 квантования по уров-55 образуется в сигнал постоянного тока ню равен единице, то на выходе второ- и через ключевой элемент 45 поступает го сумматора 32 получается пилообраз- на ключевые элементы 46 и 47, а да- ная кривая зависимости выходного на- лее - на запоминающие устройства 48 пряжения от углао(.и 49, сохраняющие информацию о значе-
я
и
о
g ных устройств управления.
I
Если токи якорей систем привода
превышают зону нечувствительности,установленную пороговыми элементами 55 10 и 56, то на выходе логического элемента И 54 будет единичный сигнал; если хотя бы один из пороговых элементов 55 и 56 имеет выходное напряжение, равное нулю, то выходное напряжение логи- 15 ческого элемента И 54 будет равно, нулю.
Логические трехвходовые элементы И 30 и 31 реализуют операцию логи- - ческого умножения
20 FsffSf (sin(n uc )) Sign(cosa() . Sign (U)j,
Третий и четвертый сумматоры 36 и 37 имеют два входа: один - с выхода логических элементов 30 и 31, а
ос
второй - отрицательный - от блока 38 смещения, выход которого по амплитуде равен половине амплитуды выкодно-- го сигнала с злементов .Й. 30 и 31.. Таким образом, если на выходе логическо 0 го элемента И 30 имеется положительная единица, то на выходе третьего сумматора 36 - положительное напряжение, равное половине выходного напряжения с логического.элемента 30; если
35 на выходе элемента 30 - нулевой потен™ циал, то на выходе третьего сумматора 36 - отрицательное напряжение. Выходы третьего и четвертого сумматоров 36 и 37 соединены с первыми вхо40 дами блоков 39 и 40 умножения. Таким образом, осуществляется определение знака управляющего сигнала, поступающего на регуляторы гармоник 42 и 43 систем электроприводов с целью учета
45 взаимного расположения векторов гармоник тока первого и второго преобраНИИ гармоники тока в соответствующий период времени.
Пороговые элементы 55 и 56 и эле- . мент И 54 реализуют следующие логические функции
если I,Irf,(i, f 5
% -0,0, если . , Idii ildiA ,
или
Id, Т-с,А 5 или
Idi i- Id,А , Idi ,
где Ifj sldii токи электродвигателей 1 и 2, определяющие уровень порога элементов 55 и 56. Генератор 53, как и ключевой элемент 45, включается выходным сигналом элемента.И 54.. С его включением выходное напряжение становится положительным, что вызывает размыкание
ключевого элемента 46. Период колебаний выходного напряжения генератора 53 берется меньше постоянной времени обмотки возбуждения соответствующего двигателя. Ключевые элемен- ты 46 и 47 - размыкающие: они замк- ;Нуты при отсутствии выходного Напряжения генератора 53 и размыкаются поочередно, например, при положитель- ном вьЕходном напряжении размьжается ключевой элемент 46, а при отрицательном - элемент 47. На пятый сумматор 50 сигналы с.запоминающих устройств 48 и 49 поступают с противо- положньп и знаками.
Блоки 46 - 53 и 41 выполняют функции оптимизатора с дискретным поиско минимума выходной величины блока 45
Ifr 1п| Iiii J
равной векторной сумме гармоник тока преобразователей.
При разомкнутом ключевом элемен
те 45 ключевые элементы 46 и 47 замкнуты и на вход интегратора 51 сигнал 45Формула изобретения не поступает. Равны нулю также выходные сигналы, поступающие с регулято- Многодвигательный электропривод, ров 42 и 43 на соответствующие входысодержащий электродвигатели постоян- регуляторов 7 и 8. Электродвигатели 1ного тока, подключенные через тирис- и 2 работают при этом с ном:инальными 50торные преобразователи и трансформато- потоками. Суммарная гармоника тока се- ры к сети переменного тока, регуля- ти 1 формируется как векторная сум-торы возбуждения с задатчиками, под- ма составляющих. Ее значение не пре-ключенные к обмоткам возбуждения вышает допустимых норм.электродвигателей, системы регулиро Если электродвигатели 1 и 2 имеют скорости электродвигателей, нагрузку, близкую к номинальной (0,3-каждая из которых включает последова- 0,4 и выше от номинальной), то ключе-тельно соединенные задатчик интенсив- вой элемент-замыкается ввиду того,ности, регулятор скорости, регулятор что на его вход поступает единичныйтока и систему импульсно-фазового
сигнал с логического элемента И 54. Одновременно включается генератор 53. На протяжении промежутка времени dt, равного периоду колебаний генератот ра 53, на вход интегратора 51 поступает с сумматора 50 сумма сигналов
Ufo и
ffCo)
(t)k(;i.
-I
. (t)j,
где
, (t) - выходные напряжения ключевого элемента 45, пропорциональные суммарным значениям
п-й гармоники в момент времени , а также в момент .
Одновременно сигнал с ключевого элемента 45 через масштабный блок 52 и сумматор 41 поступает с соответствующим знаком на вход регулятора 42 и 43. Последние осуществляют измене - ние потоков электродвигателей 1 и 2. При минимуме гармоники п-го порядка сигнал с выхода блока 41 становится равным нулю. Потоки электродвигателей при этом не изменяются. Если нагрузка одного из электродвигателей изменяется, то оптимизатор снова начинает приближать системы электроприводов к минимуму , воздействуя на потоки электродвигателей.
При снижении тока одного из электродвигателей до значений меньше уровней срабатывания пороговых элементов 55 и 56 ключевой элемент 45 разрывает цепь контроля уровня гармоники тока сети. Вслед за этим прекращается работа генератора 53, обнуляется интегратор 51. Токи возбуждения электродвигателей устанавливаются на уровне
номинальных и системы электроприво- дов -работают независимо одна от другой.
управления, выход которой подключен к входу соответствующего тиристорного преобразователя, датчики тока якоря и скорости электродвигателей, подключенные к входам соответствующих регуляторов, отличающийся тем, что, с целью повышения надежности, в него дополнительно введены вычислительные блоки определения углов управления преобразователей при номинальном потоке, датчики напряжения и потока электродвигателей, первый и второй нелинейные блоки типа Sign cos в1,два блока определения знака, блок квантования по уровняю, шесть сумматоров, два пороговых элемента, два логических трехвходовых элемента И, логический элемент И, блок смещения, п ервый и второй блоки умноже- ния, датчик тока сети, фильтр, вхого блока определения знака и через п следовательно соединенные блок квант вания по уровню, второй сумматор и второй блок определения знака подклю чен к вторым входам логических трехвходовых элементов И, третьи входы которых объединены и подключены к вы ходу первого блока определения знака выходы логических трехвходовых элементов И подключены соответственно к первым входам третьего и четвертого сумматоров, вторые входы которых сое динены с блоком смещения, выходы третьего и четвертого сумматоров сое динены соответственно с первыми вход ми блоков умножения, вторые входы ко торых подключены к выходу пятого сум матора, выход каждого из блоков умножения подключен к входу соответствующего регулятора гармоник, выход фильтра через первый ключевой элемен подключен к входам второго и третьег ключевых элементов, выходы второго
дом соединенный с датчиком тока сети, генератор управляющих напряжений, три ключевых элемента, первое и второе запоминающие устройства, масштаб- 25 и третьего ключевых элементов через ный блок, интегратор и регуляторы гар- запоминающие устройства подключены к МОНИК по числу электродвигателей, причем выходы датчиков напряжения тока якоря и потока электродвигателей соединены с входами соответствующих
входам шестого сумматора, выход кото рого через интегратор подключен к пе вому входу пятого сумматора, второй 30 вход которого через масштабный блок
подключен к выходу первого ключевого элемента, управляющие входы второго и третьего ключевых элементов подключены к генератору управляющих напрявычислительных блоков, выходы каждого из которых, подключены к соответствующему нелинейному элементу типа Sign cosoC и одному из входов первого сумматора, выходы первого и второго эле- жений, управляющий вход первого ключе- ментов типа Sign cos а подключены соот-;- вого элемента подключен к выходу ло- ветственно к первым входам логических гического элемента И, входы которого трехвходовых элементов И, выход первого сумматора соединен с первым входом второго сумматора, с входом первочерез пороговые элементы соединены с датчиками тока якоря лектродвига- телей.
го блока определения знака и через последовательно соединенные блок квантования по уровню, второй сумматор и второй блок определения знака подключен к вторым входам логических трехвходовых элементов И, третьи входы которых объединены и подключены к выходу первого блока определения знака, выходы логических трехвходовых элементов И подключены соответственно к первым входам третьего и четвертого сумматоров, вторые входы которых соединены с блоком смещения, выходы третьего и четвертого сумматоров соединены соответственно с первыми входами блоков умножения, вторые входы которых подключены к выходу пятого сумматора, выход каждого из блоков умножения подключен к входу соответствующего регулятора гармоник, выход фильтра через первый ключевой элемент подключен к входам второго и третьего ключевых элементов, выходы второго
и третьего ключевых элементов через запоминающие устройства подключены к
25 и третьего ключевых элементов через запоминающие устройства подключены к
входам шестого сумматора, выход которого через интегратор подключен к первому входу пятого сумматора, второй 30 вход которого через масштабный блок
подключен к выходу первого ключевого элемента, управляющие входы второго и третьего ключевых элементов подключены к генератору управляющих напряжений, управляющий вход первого ключе- вого элемента подключен к выходу ло- гического элемента И, входы которого
жений, управляющий вход первого ключе вого элемента подключен к выходу ло- гического элемента И, входы которого
через пороговые элементы соединены с датчиками тока якоря лектродвига- телей.
L.
Ь 1«Ъ
плЦлклаЕС
Т
L...
Составитель М.Кряхтунова Редактор И.Касарда Техред И.Попович Корректор А.Тяско
Заказ 3978/56 Тираж 659Подписное
ВНИИШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-355 Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
.J
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухдвигательный электропривод постоянного тока | 1983 |
|
SU1150724A1 |
| Электропривод постоянного тока | 1980 |
|
SU989721A1 |
| Электропривод переменного тока | 1988 |
|
SU1577060A1 |
| СПОСОБ УПРАВЛЕНИЯ ТЯГОВЫМ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ ЭТОГО СПОСОБА | 2006 |
|
RU2322752C1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| Электропривод подъемной машины | 1985 |
|
SU1339852A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Устройство для определения скорости электродвигателя в электроприводе с двухзонным регулированием | 1978 |
|
SU748752A1 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1984 |
|
SU1432705A2 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1385216A1 |
Изобретение относится к электротехнике и может быть использовано для управления электродвигателями постоянного тока, работающими в общей технологической цепи при питании от индивидуальных тиристорных преобразователей. Повьппение надежности обеспечивается тем, что данное устройство позволяет выявить и сризить расчётное значение гармоник тока в питающей сети. 1 ил.
| Иванов Г.М | |||
| и др | |||
| Автоматизиро- ванньй многодвигательньш электропри- вод постоянного тока | |||
| М.: Энергия, 1978, с | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Вентильный электропривод | 1979 |
|
SU879722A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
