Изобретение предназначено для управления свойствами механически.ч систем и гложет быть использовано для увеличения или уменьшения добротности, жесткости и собственной частоты механических колебаний, например, колебаний оболочек, колебаний тел в подвесах н опорах. Снособ может найти применение в устройствах арретирования н амортизации, для подавления внброшумов, при решении проблем левитации, например, в технике электромагнитного ориентирования тел, в экспериментальной физике.
Известен сиособ управления свойствамн колебательных механических систем, основанный на действии электромагнитных сил в высокочастотной резонансной электромагнитной системе, работающей в режиме вынужденых колебаний вблизи резонанса.
Этот способ дает при отсутствии механического контакта возможность глубоких изменений иараметров, значительный частотный интервал регулирования, амплитудную избирательность.
Однако имеются границы его применения, связанные с ограничениями на рабочую полосу частот регулирования и на возможности независимого изменения жесткости н затухания механических движений.
Цель изобретения - расширение возможностей регулирования свойств механических движений.
Это достигается тем, что колеблющееся тело (или жестко связанный с ним элемент) помепдают в зону поля многосвязной электромагнитной системы с близкими собственными частотами, где локализуется энергия связи между колебаниями, и создают в электромагиитпой системе режим вынужденных колебакий на частоте, находяш,ейся вблизи полосы спектра собственных частот.
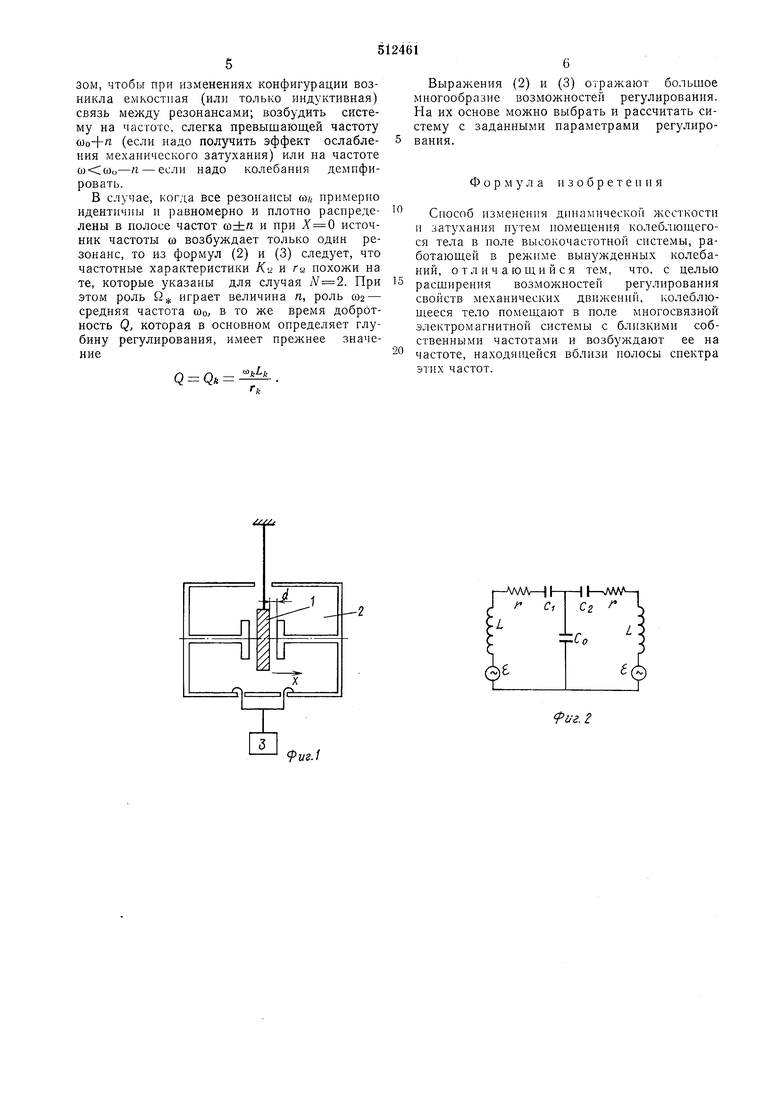
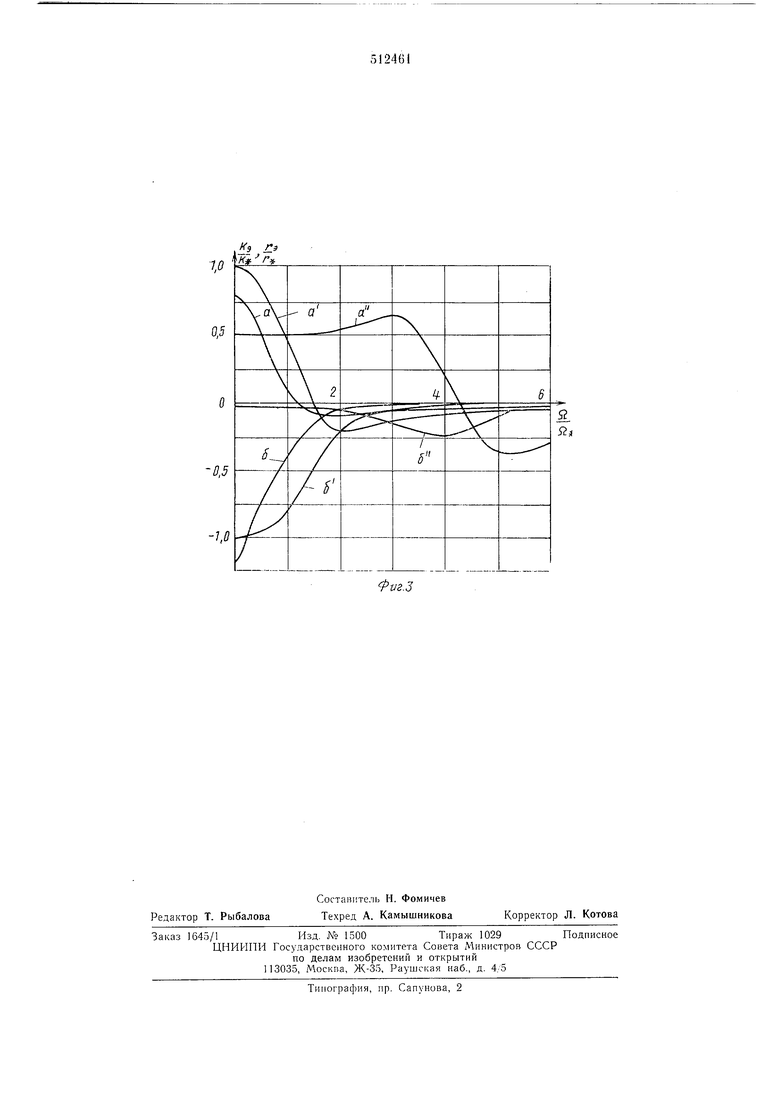
На фиг. 1 показана электромагнитная система в двумя близкими резонансамн; на фнг. 2 - ее эквивалентная электрическая схема; на фиг. 3 - частотные характеристики коэффициентов жесткости и затухания, вносимых в механнческую систему при разных настройках.
Регулируемый объект (тело) 1, колеблющееся в направлении X, помеи1,ено в полость 2 электромагнитного резонатора, питаемого от генератора 3 частоты а.
На фнг. 2 генератору 3 соответствует источник э. д. с. Е, L - эквивалентные индуктивности, г - сопротивления Со, С), Cz - емкости. Конфигурация симметрична и выбрана так, что , €2- Управление механическими свойствами достигается изменением электрических параметров (со, Е, L; Со, Сь Cj). Способ может быть реализован и на сосредоточенных электрических контурах. Если тело совершает механические колебания ji(;() - д g-/ частоты и амплитуды X d, где d - зазор (фиг. 1) образующий емкости Ci и Сг, то в результате модуляции С| (/) и С2 (/) меняется режим вынужденных электромагнитных колебаний частоты со, неодинаково меняются электрические напряжения в зазорах и возникает электрическая сила F (t) FQei--, действующая на тело в направлении X. В условиях, когда частота со расположена вблизи собственных частот (оь И2, где -Q(- здесь Р - поступающая от генератора мощность, она зависит от настройки со - соь Q - добротность резонанса частоты со2. Согласно вырал ению (1) Да есть вносимый в механическую систему коэффициент жесткости для колебаний на частоте И, г,, - вносимый коэффициент затухания. Результирующие жесткость и затухание механических колебаний тела 1 составляют и Гд.+/-,,, где /(оа и К.02-параметры механической системы при Р 0, обусловлеццые силами упругости и механического трения. На фиг. 3 изображены зависимости (кривые б) и (кривые а) как функции - при различных настройках (u)) Q ШШл -т/л г-/ / . кривые а,о - при ,5, а, о - (OjU) у при , а, б -при . В случае изменения знака настройки У величины /Си и Гд меняют знак. Если взять ВТ, ГЦ, мм, то 0,5-10 ГЦ, Д 03-10в что соответствует значительной глубине регулирования. Для возможности использования электромагнитных систем с N близкими резонансами для синтеза механических систем с заданными свойствами приведем результаты расчета для общего случая. Пусть при равновесной механической конфигурации 0 L, С, г, , 2,..., Л - эквивалентные индуктивности, емкости и сопротивления электромагнитной системы, приведенной к нормальным обобщенным координатамU (t) {U- (t), 1/2 (t-),..., Uff (t)}. Будем нормировать U (t) так, чтобы йШ/ представляла величину поглощаемой мощности резонанса К (черта означает среднее по периоду колебаний). Обозначим через UQ (t) {Loi (О.о2 (t),-, UOK (i)} режим вынужденных колебаний частоты со при 0. В случае изменения X возникает индуктивная и емкостная связь между колебаниями (Х) и Cih Cik (X). Изменение Lik, Сц приводят к изменению электрического режима UQ (t) и появлению при малых колебаниях X сил, пропорциональных X. Эквивалентные изменения коэффициентов жесткости и затухания механических колебаний X (t) частоты Q-Cco равны aik ащ X I + У - К atkuu X l + Если частота внещнего возбуждения со лежит выще полосы частот coj., то всегда . В противоположном случае, когда для всех К ,, имеем / 0. Учитывая это свойство, можно, например, создать широкополосное устройство по изменению затухания. Для этого надо сконструировать электромагнитную систему с набором резонансов со и, плотно - Wfe -- , заполняющих широкий интервал частот (Ло±п, около средней частоты соо выбрать геометрию системы таким образом, чтобы при Р1зменениях конфигурации возникла емкостная (или только индуктивная) связь между резонансами; возбудить систему на частоте, слегка превышающей частоту (Оо+« (если надо получить эффект ослабления механического затухания) или на частоте охСыо-п - если надо колебания демпфировать.
В случае, когда все резоиансы ш/, примерно идентичны и равномерно и плотно распределены в нолосе частот аз+п и при Х 0 источник частоты (л) возбуждает только один резонанс, то из формул (2) и (3) следует, что частотные характеристики Хь и га похожи на те, которые указаны для случая . При этом роль Q-I. играет величина п, роль «2 - средняя частота Ыо, в то же время добротность Q, которая в основном определяет глубину регулирования, имеет прежнее значение
Q-Q
Выражения (2) и (3) отражают большое многообразие возможностей регулирования. На их основе можно выбрать и рассчитать систему с заданными параметрами регулирования.
Формула изобретения
Способ изменения дпнамическон жесткости и затухания нутем помещения колеблющегося тела в поле высокочастотной системы, работающей в режиме вынул«:денных колебаний, отличающийся тем, что, с нелью расширения возможностей регулирования свойств механических , колеблющееся тело помещают в поле многосвязной электромагнитной системы с близкими собственными частотами п возбуждают ее на частоте, находящейся вблизи полосы спектра этих частот.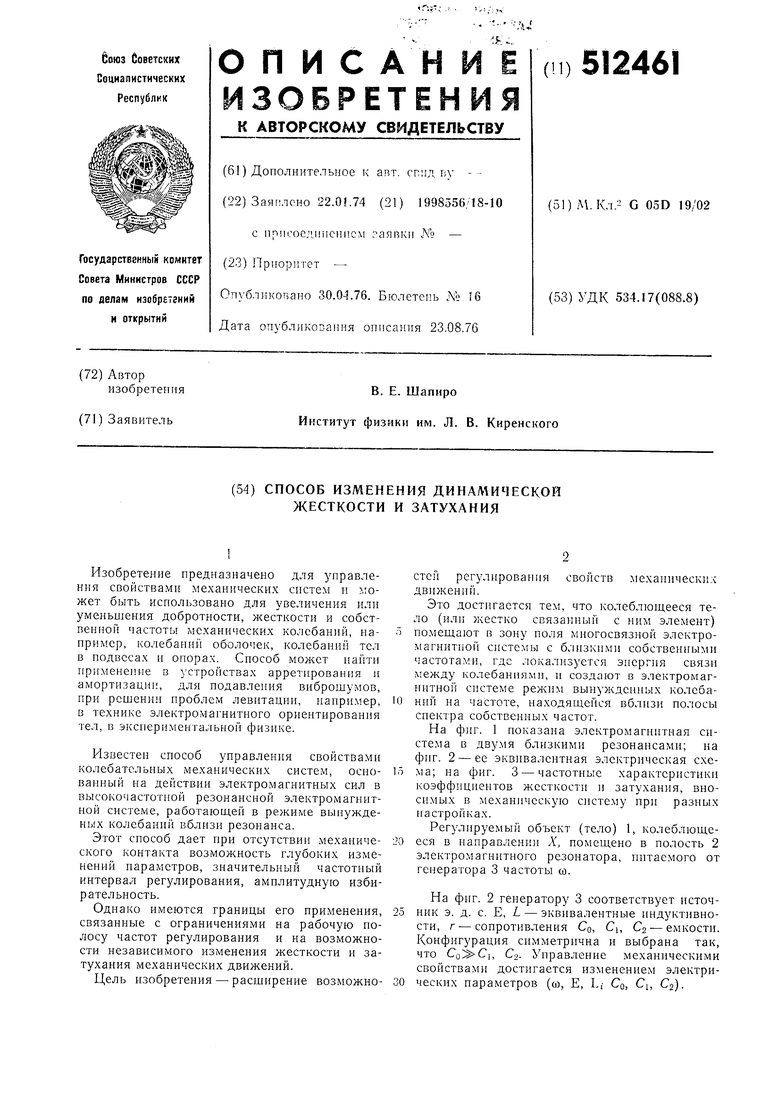

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕНЕНИЯ ЗАТУХАНИЯ МЕХАНИЧЕСКИХ | 1973 |
|
SU394760A1 |
| Устройство для моделирования колебательных систем | 1978 |
|
SU698014A1 |
| РЕЗОНАНСНЫЙ СПОСОБ ИЗМЕРЕНИЯ МОМЕНТОВ ИНЕРЦИИ ИЗДЕЛИЙ ТИПА ТЕЛ ВРАЩЕНИЯ | 1991 |
|
RU2077036C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ДЕБИТА НЕФТЕДОБЫВАЮЩИХ СКВАЖИН | 2007 |
|
RU2361080C1 |
| Способ измерения массового расхода среды | 1980 |
|
SU1008617A1 |
| ВЫСОКОЧУВСТВИТЕЛЬНЫЙ ПРИЕМНИК МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 1996 |
|
RU2158014C2 |
| УСТРОЙСТВО ДЛЯ ПРОВЕРКИ ГИПОТЕЗЫ СИЛОВОЙ ОТДАЧИ НА ИСТОЧНИК ЗВУКОВОГО ВОЛНОВОГО ПОЛЯ | 2010 |
|
RU2439840C1 |
| СПОСОБ ПОДАВЛЕНИЯ СВОБОДНЫХ КОЛЕБАНИЙ ОСЦИЛЛИРУЮЩЕГО ВТОРИЧНОГО ЗЕРКАЛА ТЕЛЕСКОПА | 1997 |
|
RU2151414C1 |
| САМОПОДДЕРЖИВАЮЩАЯСЯ МАГНИТО-ГРАВИТАЦИОННАЯ СИСТЕМА "МОТОР-ГЕНЕРАТОР" С АВТОСТАБИЛИЗАЦИЕЙ РЕЖИМА РЕЗОНАНСА КОЛЕБАТЕЛЬНОГО ДВИЖЕНИЯ МАГНИТА | 2018 |
|
RU2699021C1 |
| СПОСОБ УТИЛИЗАЦИИ ЭНЕРГИИ МОЛНИИ | 2008 |
|
RU2369991C1 |
игА
г. Z
0.5
