Изобретение относится к физике магнетизма и может быть использовано для получения энергии преобразованием силовых полей - магнитного и гравитационного в не замкнутой механической системе.
В силу известных законов термодинамики невозможен «вечный» двигатель» когда получаемая энергия больше или равна затраченной в какой-либо замкнутой системе. Это, в частности, связано с преобразованием ОДНОГО вида энергии в другой, например, тепловой энергии топлива в механическую, электрическую, световую и другие виды. Однако, это правило не распространяется на энергопреобразующие системы, в которых получаемая полезная энергия не зависит от энергии затраченной, а использует ДРУГОЙ вид энергии, например, гравитационную в не замкнутой механической системе.
Аналоги таких энергопреобразующих устройств не известны.
Целью изобретения является обеспечение независимости получаемой полезной электроэнергии от магнито-гравитационного преобразования от механической энергии вращательного движения, вызывающего резонансное колебательное движение постоянного магнита вблизи катушки индуктивности.
Указанная цель достигается в самоподдерживающейся магнито-гравитационной системе «мотор-генератор» с автостабилизацией режима резонанса колебательного движения магнита, включающей пару диэлектрических трубок, в каждой из которых размещены свободно колеблющиеся с одинаковой собственной частотой одинаковые постоянные магниты цилиндрической формы, магнитные полюсы которых через две одинаковых пружины связаны с концами диэлектрических трубок; обе диэлектрические трубки центрально-симметрично закреплены на горизонтально ориентированной оси вращения двигателя постоянного тока и вращаются в вертикальных плоскостях с их рассредоточением между собой на угол 90° и сдвигом вдоль оси вращения; при горизонтальном положении одной из диэлектрических трубок магнит в ней расположен строго по центру, то есть центрально-симметрично к оси вращения, а при вертикальном положении другой диэлектрической трубки ее магнит под действием его веса смещен вниз от оси вращения действием гравитационного поля Земли; снаружи диэлектрических трубок закреплены центрально-симметрично к оси вращения катушки индуктивности из двух полукатушек, расположенных с двух сторон от магнитов и соединенных между собой последовательно по правилу «начало одной полукатушки соединено с началом другой» с длиной каркасов каждой из полукатушек, соизмеримой с величиной амплитуды колебаний магнитов, собственные частоты которых выбраны равными частоте вращения оси двигателя постоянного тока, скорость вращения оси которого автоматически поддерживается системой авторегулирования, включающей последовательно соединенные с выходом одной из катушек индуктивности схему сравнения частот, на второй вход которой подключен подстраиваемый по частоте генератор опорной частоты, интегратор и усилитель постоянного тока, выход которого соединен с двигателем постоянного тока, источником которого является аккумуляторная батарея, заряжаемая от переменного напряжения каждой из двух катушек индуктивности через двухполупериодные выпрямительные мостовые схемы Греца; при этом выводы катушек индуктивности соединены с изолированными от оси вращения кольцевыми электродами со скользящими контактами, связанными с выходами генераторов электрического тока.
С целью увеличения мощности генерируемого электрического тока и снижения эффекта вибрации оси вращения двигателя в заявляемом устройстве применено n одинаковых пар диэлектрических трубок с их указанными элементами при взаимном рассредоточивании этих последовательных пар по углам, равным 180°/n и при параллельном подключении n выпрямительных мостовых схем к единому аккумулятору.
Достижение поставленной цели изобретения объясняется использованием энергии гравитационного поля Земли при организации колебательного движения постоянных магнитов внутри диэлектрических трубок относительно соответствующих катушек индуктивностей, в которых при этом индуцируются переменные э.д.с. с частотой вращения оси двигателя постоянного тока, а увеличение размаха колебаний магнитов достигается выбором собственной частоты колебаний магнитов равной частоте вращения оси двигателя постоянного тока, что вызывает явление резонанса, которое автоматически поддерживается работой системы авторегулирования использованием перестраиваемого по частоте опорного генератора высокой стабильности по частоте колебаний. Это позволяет поддерживать резонанс при изменении тока в полезной внешней нагрузке. Получение выходной электрической энергии больше затраченной на работу двигателя постоянного тока объясняется использованием дополнительной энергии, получаемой от гравитационного поля.
Состав оборудования заявляемой системы представлен на прилагаемых рисунках.
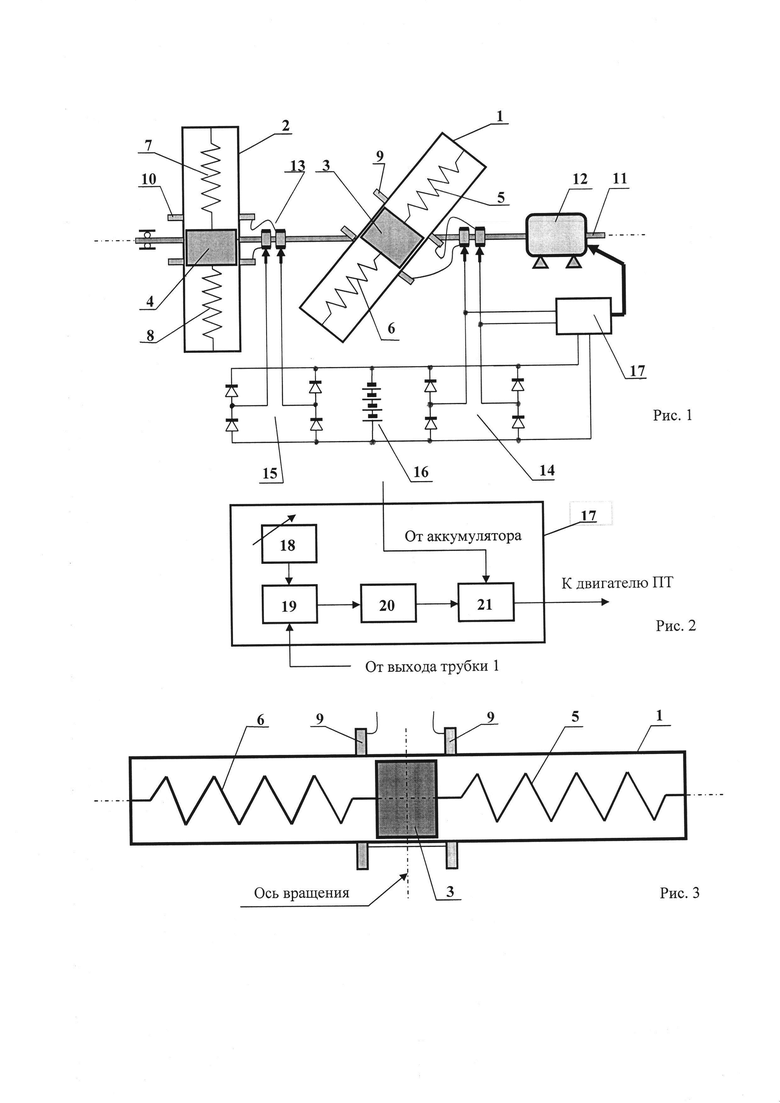
На рис. 1 дана схема заявляемой системы «мотор-генератор», содержащая:
1 и 2 - диэлектрические трубки, например, керамические, с внутренней смазкой, развернутые друг относительно друга в вертикальных плоскостях на угол 90°,
3 и 4 - колеблющиеся в трубках соответственно 1 и 2 одинаковые постоянные магниты, например, неодимовые Nd Fe В, цилиндрической формы,
5 - 8 - одинаковые по геометрии и параметрам жесткости пружины, концы которых закреплены на концах диэлектрических трубок 1 и 2 и магнитными полюсами постоянных магнитов 3 и 4,
9 и 10 - катушки индуктивности, закрепленные снаружи диэлектрических трубок 1 и 2, каждая их которых включает две полукатушки симметрично расставленные от оси симметрии оси вращения 11 на расстояние друг от друга, несколько большее длины магнита,
11 - ось вращения двигателя постоянного тока 12, на которой закреплены диэлектрические трубки 1 и 2 центрально-симметрично к оси,
12 - двигатель постоянного тока,
13 - кольцевые электроды, изолированно закрепленные на оси вращения 11, с которыми соединены выводы катушек индуктивности 9 и 10, со скользящими электродами, образующими выходы электрогенераторов,
14 и 15 - двухполупериодные мостовые выпрямительные модули - мосты Греца, включенные к выводам электрогенератора, к его щеткодержателям кольцевых электродов 13,
16 - батарея аккумуляторов, связанная с выпрямительными модулями 14 и 15, с внешней нагрузкой (на схеме рис. 1 не показана), и с двигателем постоянного тока 12 через регулятор 17 питающего этот двигатель напряжения для автостабилизации скорости вращения двигателя постоянного тока, один вход которого подключен к одному из выходов электрогенератора переменного тока, а второй к подстраиваемому опорному генератору 18.
17 - регулятор двигателя постоянного тока 12, поддерживающий постоянную заданную скорость вращения его ротора.
На рис. 2 представлена блок-схема регулятора напряжения 17, подаваемого на двигатель постоянного тока 12, включающая следующие блоки:
18 - генератор опорного напряжения с подстройкой частоты, задающий частоту вращения оси 11 двигателя постоянного тока 12,
19 - схема сравнения частоты напряжения, вырабатываемого электрогенератором, и частоты опорного генератора 18 с выработкой сигнала ошибки, как функции разности этих частот с тем или иным знаком и величиной,
20 - интегратор,
21 - усилитель постоянного тока, питаемый от аккумуляторной батареи 16.
На рис. 3 показана конструкция диэлектрической трубки 1 с ее присоединенными элементами 3, 5 и 6, и 9 при ее расположении в горизонтальной плоскости,
Рассмотрим работу заявляемой системы.
Диэлектрическая трубка 1 включает цилиндрический постоянный магнит 3 длиной h и с диаметром D, свободно колеблющийся в ней (при наличии смазки) с частотой f и амплитудой А относительно оси симметрии оси вращения 11 двигателя постоянного тока 12. Магнит 3 связан двумя одинаковыми пружинами 5 и 6 с общей их жесткостью k (в ньютонах на метр) с концами трубки 1, вращающейся в вертикальной плоскости с осью вращения 11 (ось вращения 11 ориентирована в горизонтальной плоскости). Масса магнита m=πhρD2/4, где ρ - плотность ниобиевого магнита, равная 7,4 г/см3. Снаружи трубки 1 закреплена состоящая из двух полукатушек катушка индуктивности 9 - многослойная с длиной намотки Δh<QΔhO в каркасах двух полукатушек и с числом витков N, расположенная центрально-симметрично относительно указанной оси симметрии оси вращения 11; концы этой катушки образуют выход электрогенератора. То же самое имеет место для трубки 2, закрепленной на оси вращения 11 и расположенной под углом 90° по отношению к трубке 1. Когда в статике (при отсутствии вращения) трубка 1 занимает горизонтальное положение (рис. 2), трубка 2 находится в вертикальном положении, и при этом ее магнит 4 под действием силы веса Р=mg (в ньютонах) оказывается смещенным вниз на величину ΔhO=|-mg/k|=πgphD2/4k от осесимметричного его положения, где g=9,81 м/с2 - ускорение силы тяжести.
По мере медленного поворота в статике трубки 2 из вертикального ее положения в горизонтальное указанная величина смещения магнита 4 уменьшается до нуля в горизонтальном положении этой трубки действием сил пружин 7 и 8 по закону Δh(ϕ)=ΔhO cosϕ при 0≤ϕ≤π/2 с отсчетом угла ϕ от вертикали в направлении к горизонтали.
Как известно, собственная частота колебаний fO магнита 3 (или 4) с пружинами 5 и 6 (или 7 и 8 для магнита 4) определяется из выражения:

где частота в герцах, масса в килограммах, жесткость в ньютонах на метр, откуда находим выражение для жесткости пружин 5 и 6 (7 и 8) при заданных значениях частоты fO и массы m магнита 3 (4):

где ωO=2πfO - круговая частота резонансных колебаний магнитов 3 и 4 в трубках 1 и 2. Понятно, что для обеспечения резонансных колебаний магнитов 3 и 4 необходимо, чтобы частота f вращения оси 11 была равна собственной частоте fO колебаний магнитов 5 и 6, то есть f=fO с достаточно высокой точностью.
При резонансе амплитуда А колебаний магнитов возрастает в Q раз по сравнению с величиной динамического смещения Δh(ωO) - то есть А=Q Δh(ωO), где Q - добротность колебательной системы, определяемая малым трением магнитов о стенки трубок и внешней нагрузкой, присоединяемой к электрогенератору. Можно показать, что при не очень большой частоте вращения оси 11 величина Δh(ωO) - весьма незначительно отличается от величины статического смещения магнита ΔhO.
Выбрав пружины 5-8 требуемой жесткости k согласно выражению (2) при заданной массе магнитов и резонансной частоты их колебаний, определяем значение максимального смещения ΔhO магнита 3 (и 4) при вертикальном положении трубки 1 (и 2):

Как видно из выражения (3), смещение ΔhO магнита при резонансе не зависит от массы магнита, и массу последнего можно увеличивать при соответствующем увеличении жесткости k пружин. Этот вывод позволяет повышением массы магнита увеличить энергетику системы, определяемую использованием гравитационного поля. Действительно, величина ΔW- есть порция энергии, отбираемая из гравитационного поля Земли в каждом акте колебаний магнита, дважды за каждый период колебаний, и равная

Так, если h=5 см, D=6 см, ρ=7,4 г/см3 имеем m = 1045 г = 1,045 кг, и для частоты резонанса fO=25 Гц получаем смещение ΔhO =0,398 мм. Если задать величину добротности колебательной системы порядка Q≈20, то амплитуда колебаний А магнитов 3 и 4 в трубках 1 и 2 оказывается равной А=8 мм. При этом имеем величину порции энергии ΔW=0,820 Дж. Если катушки индуктивности 9 и 10 имеют длину намотки по Δh=5 мм с двух сторон от магнитов, то магниты 3 и 4 будут при своих колебаниях с амплитудой 8 мм от оси симметрии оси вращения 11 полностью выходить с обеих внутренних сторон этих полукатушек индуктивности на расстояния по 3 мм.
Полная мощность РГР отбираемой гравитационной энергии от вращения обеих трубок 1 и 2 находится из выражения:

и эта мощность для рассматриваемого примера равна РГР>=100*0,82=82 Вт. Кстати, из выражения (6) следует, что мощность РГР линейно растет с ростом массы магнитов 2 и 4 и падает с ростом частоты резонанса, поскольку жесткость пружин растет пропорционально квадрату круговой частоты вращения оси 11 двигателя 12.
Максимальная скорость движения магнитов 3 и 4 при совпадении их центров с осью вращения 11, как известно, находится из формулы:

и при указанных величинах эта скорость равна VMAX=157 с-1 * 0,006 м = 0,94 м/с. Эту скорость выгодно ограничавать в целях снижения потерь на трение магнитов о стенки трубок, что положительно влияет на добротность Q колебательных систем.
Однако снижение скорости колебательного движения магнитов приводит к уменьшению частной производной ∂Ф/∂t, где Ф=BS = магнитный поток каждого их магнитов на их полюсах, В - магнитная индукция материала магнитов (для неодимовых магнитов обычно В=1,4 Тл), S=πD2/4 - сечение полюсов магнитов в квадратных метрах. Для рассматриваемого примера Ф=1,4 Тл* 28,25*10 -4 м2=39,55*10 -4 В*сек. Учитывая кубическую зависимость убывания магнитного потока в функции расстояния от магнитного полюса, будем полагать, что магнитный поток, связанный с катушкой индуктивности 9 (или 10) изменяется на величину ΔФ=0,3 Ф за интервал времени Δt=0,25/fO=0,01 секунды, и тогда получим в среднем ∂Ф/∂t=0,3*39,55*10-2=0,118 В на один виток катушки индуктивности 9 (или 10). Если полное число витков катушки индуктивности N=230, то получаемая э.д.с индукции на выводах катушек индуктивности будет Е=0,118*230=27,14 В, что позволяет осуществлять заряд батареи аккумуляторов 16 напряжением 24 В. через выпрямительные модули 14 и 15.
Проведем приблизительную оценку потребляемой мощности двигателем постоянного тока 12 в установившемся режиме вращения оси 11 со скоростью 25 об/с. Пусть радиус четырех кольцевых электродов 13 равен r=0,01 м, а коэффициент трения скольжения угольных щеток γ=0.14. Тогда момент трения при прижиме четырех щеток к кольцевым электродам силой в 1 ньютон (приблизительно 100 Гр) оценивается как МТР=4*0,01*0,14*1=0,0056 н.м, Учитывая трение в подшипниках с коэффициентом трения качения в 0,05 с радиусом 0,015 м и силой прижима оси в 20 н (около 2 кГ) для трех подшипников получим момент трения Мтр*=3*0,05*0,015*20=0.0045 н.м. Учитывая также трение вращающейся системы о воздух, можно полагать, что общий момент трения M∑≈ 0,015 н.м. При угловой скорости вращения оси 11ωО=6,28*25=157 рад/с при к.п.д. двигателя постоянного тока 90% потребляемая им мощность составляет PO=ωО M∑ /0,9≈157*0,015/0,9=2,617 Вт, то есть не более 3 Вт при значении электрической мощности генератора около 82 Вт за счет использования энергии гравитационного поля.
Если на ось вращения 11 насадить n=10 пар диэлектрических трубок с взаимным угловым сдвигом этих пар на 18°, можно получить полезную мощность порядка 800 Вт при частоте «дрожания» оси в 1 кГц.
Важно отметить, что при вращении диэлектрических трубок 1 и 2 от двигателя постоянного тока 12, кроме преодоления трения движущихся и вращающихся частей системы, затрачиваемая на это энергия, питающая двигатель постоянного тока 12, совершается работа по подъему массы m магнитов 3 и 4 на величину высоты Q ΔhO четырежды за каждый полный оборот оси вращения 11 в обеих трубках 1 и 2, как это следует из выражения (4). Однако это не вызывает ЗАТРАТЫ на такой подъем энергии, подводимой к двигателю постоянного тока 12, поскольку эти магниты при их «падении» в соответствующие отрезки времени ОТДАЮТ такую же энергию двигателю обратно. Процессы забора и отдачи порций энергии при наличии двух трубок 1 и 2, развернутых друг относительно друга на угол 90°, происходят одновременно - в одной трубке происходит забор энергии, а в другой ее отдача. Так что двигатель вращает некоторую как бы однородную общую массу, испытывая потери лишь на трение в трех подшипниках оси вращения, на четырех скользящих контактах и о воздух, а также в омических потерях обмотки двигателя (с учетом его к.п.д.). Вся полезная получаемая энергия электрогенератора создается от энергии гравитационного поля с его электромагнитным преобразованием колебательного движения магнитов относительно катушек индуктивностей. При этом вся система в целом является РАЗОМКНУТОЙ, и в ней не действует правило запрета «вечного» двигателя, как для ЗАМКНУТЫХ механических систем.
Следует кратко обратиться к описанию работы системы авторегулирования на элементах 18-21, поддерживающей автоматически режим резонанса колебаний магнитов 3 и 4 с пружинами 5-8 во вращающихся трубках 1 и 2 с частотой f=fO
Кратко остановимся лишь на работе схемы сравнения частот 19, поскольку работа других узлов системы авторегулирования общеизвестна и пояснений не требует. Эта схема может быть выполнена различными вариантами. Рассмотрим один из них. Сигналы исследуемой и подстраиваемой частот и частоты опорного генератора 18, представляющие гармонические колебания, сначала преобразуют двумя ограничителями амплитуды, на выходе которых образуются периодические последовательности прямоугольных импульсов с частотами следования соответственно f и fO, в общем случае не равными друг другу. Затем с помощью двух счетчиков высокочастотных импульсов, например, с частотой пересчета в 100 кГц, определяется длительность каждого положительного импульса двух последовательностей прямоугольных импульсов с крутыми фронтами и спадами, и полученные результаты чисел подсчитанных высокочастотных импульсов сравниваются между собой методом алгебраического вычитания. В результате образуется остаточная ошибка, имеющая определенную величину по модулю и соответствующий знак.
Отметим, что вся рассматриваемая схема 17 питается от батареи аккумуляторов 16, потребляя относительно небольшую мощность (до 5 Вт).
Заявляемая система энергоснабжения, основанная на использовании гравитационного поля Земли с его магнито-гравитационным преобразованием открывает новую страницу в познании физической природы. Физическая наука весьма мало знает о тайнах гравитации, кроме ее наглядных проявлений в форме веса тел. Например, мы до сих пор не знаем, почему Земля и другие небесные тела стабильно во времени вращаются, какую роль выполняют «черные дыры» во Вселенной в процессе поддержания вечного существования самой Вселенной и многое-многое другое, что, возможно, связано с гравитацией.
Изобретение относится к электротехнике и может быть использовано для получения энергии преобразованием силовых полей - магнитного и гравитационного в незамкнутой механической системе. Технический результат состоит в обеспечении независимости получаемой полезной электроэнергии от магнитогравитационного преобразования от механической энергии вращательного движения. Самоподдерживающаяся магнитогравитационная система «мотор-генератор» с автостабилизацией режима резонанса колебательного движения магнитов включает пару диэлектрических трубок, в каждой из которых размещены свободно колеблющиеся с одинаковой собственной частотой одинаковые постоянные магниты цилиндрической формы, магнитные полюсы которых через две одинаковые пружины связаны с концами диэлектрических трубок. Обе диэлектрические трубки центрально-симметрично закреплены на горизонтально ориентированной оси вращения двигателя постоянного тока и вращаются в вертикальных плоскостях с их рассредоточением между собой на угол 90° и сдвигом вдоль оси вращения. При горизонтальном положении одной из диэлектрических трубок магнит в ней расположен строго по центру. При вертикальном положении другой диэлектрической трубки ее магнит под действием его веса смещен вниз от оси вращения действием гравитационного поля Земли. Снаружи диэлектрических трубок закреплены центрально-симметрично к оси вращения катушки индуктивности из двух полукатушек, расположенных с двух сторон от магнитов и соединенных между собой последовательно с длиной каркасов каждой из полукатушек, соизмеримой с величиной амплитуды колебаний магнитов, собственные частоты которых выбраны равными частоте вращения оси двигателя постоянного тока, скорость вращения оси которого автоматически поддерживается системой авторегулирования. 1 з.п. ф-лы, 3 ил.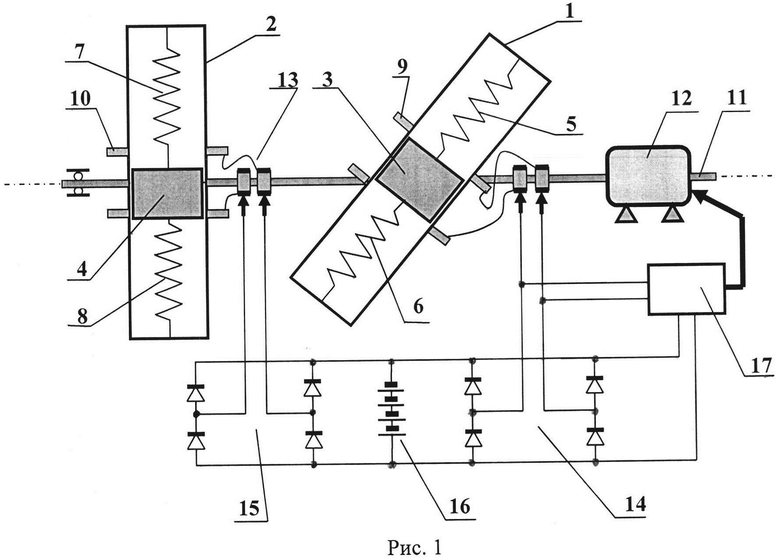
1. Самоподдерживающаяся магнито-гравитационной система «мотор-генератор» с автостабилизацией режима резонанса колебательного движения магнитов, включающая пару диэлектрических трубок, в каждой из которых размещены свободно колеблющиеся с одинаковой собственной частотой одинаковые постоянные магниты цилиндрической формы, магнитные полюсы которых через две одинаковые пружины связаны с концами диэлектрических трубок; обе диэлектрические трубки центрально-симметрично закреплены на горизонтально ориентированной оси вращения двигателя постоянного тока и вращаются в вертикальных плоскостях с их рассредоточением между собой на угол 90° и сдвигом вдоль оси вращения; при горизонтальном положении одной из диэлектрических трубок магнит в ней расположен строго по центру, то есть центрально-симметрично к оси вращения, а при вертикальном положении другой диэлектрической трубки ее магнит под действием его веса смещен вниз от оси вращения действием гравитационного поля Земли; снаружи диэлектрических трубок закреплены центрально-симметрично к оси вращения катушки индуктивности из двух полукатушек, расположенных с двух сторон от магнитов и соединенных между собой последовательно по правилу «начало одной полукатушки соединено с началом другой» с длиной каркасов каждой из полукатушек, соизмеримой с величиной амплитуды колебаний магнитов, собственные частоты которых выбраны равными частоте вращения оси двигателя постоянного тока, скорость вращения оси которого автоматически поддерживается системой авторегулирования, включающей последовательно соединенные с выходом одной из катушек индуктивности схему сравнения частот, на второй вход которой подключен подстраиваемый по частоте генератор опорной частоты, интегратор и усилитель постоянного тока, выход которого соединен с двигателем постоянного тока, источником которого является аккумуляторная батарея, заряжаемая от переменного напряжения каждой из двух катушек индуктивности через двухполупериодные выпрямительные мостовые схемы Греца; при этом выводы катушек индуктивности соединены с изолированными от оси вращения кольцевыми электродами со скользящими контактами, образующими выходы генераторов электрического тока.
2. Самоподдерживающаяся магнито-гравитационная система «мотор-генератор» с автостабилизацией режима резонанса колебательного движения магнитов по п. 1, отличающаяся тем, что на ось вращения двигателя постоянного тока закреплены последовательно вдоль оси его вращения n пар одинаковых по всем параметрам диэлектрических трубок с их элементами, рассредоточенных друг от друга на угол 180° / n в вертикальных плоскостях, с подключением их к общей батарее аккумуляторов.
| RU 2013142734 A, 27.03.2015 | |||
| RU 2013133506 A, 27.01.2015 | |||
| RU 2008132358 A, 10.02.2010 | |||
| RU 200812281 А, 10.12.2009 | |||
| RU 2006118384 A, 10.12.2007 | |||
| СПОСОБ УСИЛЕНИЯ МОЩНОСТИ НА ВАЛУ ЭЛЕКТРОДВИГАТЕЛЯ | 1997 |
|
RU2114497C1 |
| JP 2016017518 A, 01.02.2016 | |||
| JP 6187946 B2, 30.08.2017. | |||

