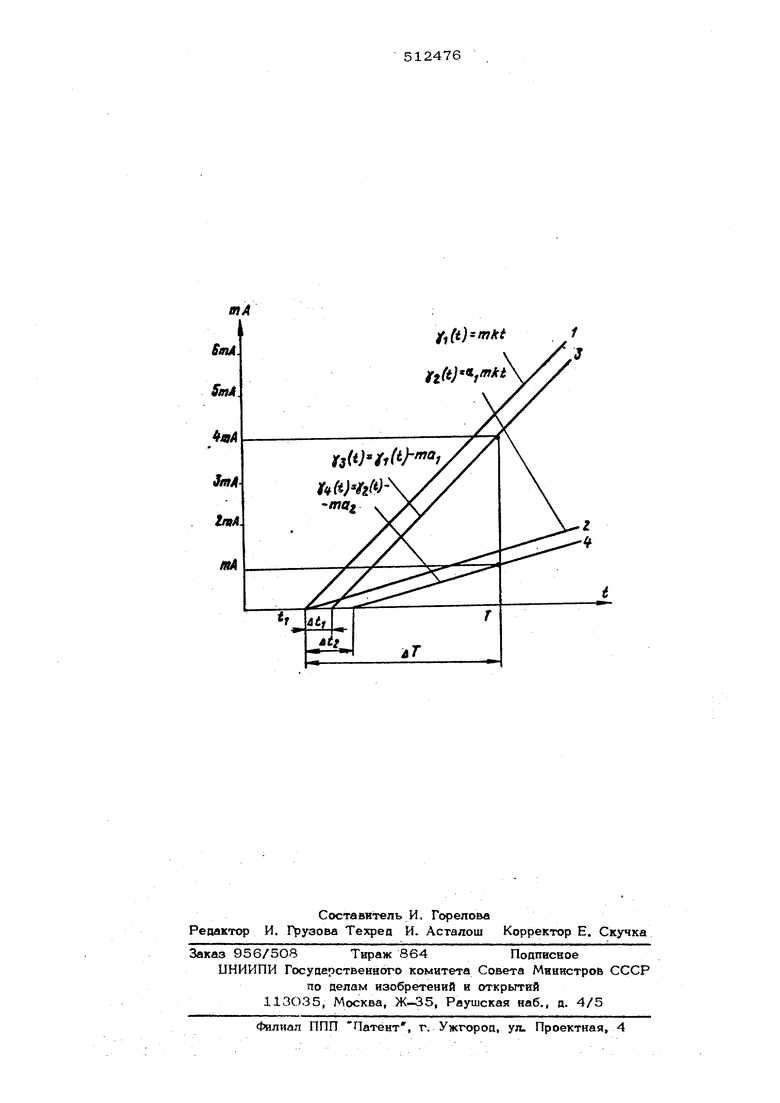
Способ относится к области аналогово вычислительной техники в может быть ис пользован аля моделирования решения сис мы уравнений вида QX-I- Ах, Og -ь Axj -5- , а ci + Ax . . а, -v Ах I 01 +АХ. 1 где -О 6 (а, Oj,,..., а,... 01„) А ;, а и А - известные рациональные чи 0(oC,oCg,...,cC,...y, оС - известные правильные раци нальные дроби; (Х,Х,...Х.,...,Х„У X - неизвестные целые числа; -t 1,2,3,... .П . Известны способы моделирования реше НИИ системы линейных уравнений, заключающиеся в том, что неизвестные величин и их линейные комбинации представляют в виде изменяющейся физической величины, например напряжения. Цель изобретения - сокращение времени вычислений путем раскрытия многозначно сти в области возможных значений неизвестных. Это достигается за счет осуществления следующих операций: формируют ряд пилообразных напряжений с заданным наклоном, пропорциональным задерживают момент начала развертки пилы на время, пропорциональное заданным величинам 0(i , , сравнивает величину пилоЬб- разного напряжения с рядом постоянных напряжений, пропорциональных А, 2А, ЗА,..., илако фиксируют момент времени одновременного равенства всех пилообразных напряжений с некоторыми из данного ряда постоянных напряжений и измеряют интервал времени от момента начала задержки развертки пилы до зафиксированного момента времени. На чертеже показана временная диаграмма, поясняющая сытность способа решения системы линейных уравнений. Прямая 1 rj (fi - mkt и прямая 2 ) оС mki; моделируют в вице изменяющихся во времени уровней физической величин соответствующие суммы при текущих параметрах X (i)n X р (t) (1 -масштабный коэффициент преобразования, )t -скорость взмеиеиия физической величины). Прямые 3 Т ,() ( t ) изображают прямые 1 и 2, сдвинутые относительно мм «евта времени t на время &t , и At I соответствен но. Представляя Ai иДtgB уравнения прямых f а } я TgC t ) можно убедиться, что прямые 3 и 4 )-У (t)-rnk(.,) у (i) -та,, „(i) :Ге () -, гт, k (Т5;) (TaW- ma моделируют соответственно величины , А (f ) и Д ( -t) при линейно возрастающих X ( i ). Очевидно , что в момент времени Т, когда Ах(Т) иАх2(Т) одновремен но равны некоторым из набора уровней Ш А 2mA , 5гп А , .,., т А, моделируется решение системы уравнений, а соот ветствующие величины Х (Т ) Х и 2 ( Т ) 2являются корнями СИС темы уравнений. Отсчитанные в моменты Времени Т ординаты прямых У-i ( Т ) и у (Т) пропорциональны величинам, сумм + Ax и . Вре менной интервал ДТ Т - t также про пороионален величинам этих сумм. Предлагаемый способ последовательно определяет и представляет все удовлетво ряюшие системы уравнений величины сумм в виде соответствующего каждой из сумм уровня некоторой физической величины (в данном случае напряжения) и пропорционал иого всем суммам временного интервала. Таким образом, автоматически раскрывается многозначность в области возможных значений неизвестных. зобретения Формула Способ моаелироваиия решений системы яввейЕЫх уравнений вида а. + АхOig +Axjj О f Ах .1111 оС„а, fAx, где , oig,..., а,... а„)А V а , Л - известные рациональные числа 5(,а,...,,...); ОС - известные правильные рациональные дроби: .,.X, X - неизвестные целые числа; 1, 2, 3, ... , Г1 , заключающийся в том, что неизвестные величины и их линейные комбинации представляют в виде изменяющейся физической величины, Есапример напряжения, о т л и ч а и и с я тем, что, с целью сокращения времени вычислений, формируют ряд пилообразных напряжений с заданным наклоном, пропорциональным оС , задерживают момент начала развертки пилы на время, пропорциональное заданным величинам а -у , ОйОк. -1 ... з-г- , . , сравнивают величину ot-,- пилообразного напряжения с рядом постоянных напряжений, пропорциональных А, 2А, А, фиксируют момент времени одновременного равенства всех пилообразных напряжений с иекотбрыми из данного ряда постоянных напряжений и измеряют интервал времени от момента начала задержки развертки пилы до зафиксированного момента времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для решения неопределенной системы линейных уравнений | 1973 |
|
SU523421A1 |
| Аналого-цифровой преобразователь | 1987 |
|
SU1481887A1 |
| Способ дискретизации и восстановления непрерывного сигнала | 2015 |
|
RU2660320C2 |
| Способ измерения давления | 1975 |
|
SU600404A1 |
| СПОСОБ МОДЕЛИРОВАНИЯ И ВИЗУАЛИЗАЦИИ РАСПРОСТРАНЕНИЯ ВОЗБУЖДЕНИЯ В МИОКАРДЕ | 2007 |
|
RU2358646C2 |
| Способ телекоммуникаций для достижения потенциальных производительности, помехоустойчивости и скорости соединения | 2021 |
|
RU2759216C1 |
| Устройство для получения частного от деления двух последовательностей импульсов | 1959 |
|
SU130688A1 |
| СПОСОБ УПРАВЛЕНИЯ С ШИРОТНО-ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ | 2001 |
|
RU2216764C2 |
| СПОСОБ УПРАВЛЕНИЯ С ШИРОТНО-ИМПУЛЬСНЫМ РЕГУЛИРОВАНИЕМ | 2001 |
|
RU2214618C2 |
| Способ формирования фигур конического сечения на экране электронно-лучевой трубки и устройство для его осуществления | 1976 |
|
SU691897A1 |