Изобретение относится к области контрольно-измерительной техники, в частности к технике измерения давления. Известны способы измерения физических величин путем сравнения измеряемой величины с монотонно изменяющейся во времени опорной величиной р. . Например, способ по которому измеряемое давление преобразуется в силу, уравновешиваемую компенсирующе силой, создаваемой генератором силы 2 . Вследствие того, что сам прео разователь давления в силу не охватывается обратной связью, возникает погрешность от нелинейности преобразователя. Кроме т-рго, источниками погрешности являются нелинейность генератора силы и нестабильность характеристик преобразователей. Цель изобретения - повышение точности измерения давления. Это достигается тем, что по предлагаемому способу опорное давление измеряют одновременно двумя датчикам с произвольными характеристиками в +n + 2 моменты времени в период изменения опорного давления, где гп и п - степени полиномов функций отличия номинальных характеристик каждого датчика от их реальных функций преобразования, определяют эти функции отличия по полученным 2(m-fn+2) значениям выходных сигналов датчиков, на основании которых судят о величинах погрешностей для каждого датчика в момент равенства измеряемого и опорного давлений, после чего, вводя эти значения погрешностей в фактически полученные результаты измерения, определяют измеряемую величину. Измеряемое давление Р сравнивается с монотоннр-изменяю1диг ся во времени опорным давлением P(t) , который, кроме того, измеряется одновременно двумя различными датчиками. Предполагается, что характеристики датчиков линейно независимые. На основании статистических данных о характеристиках датчиков и устройства жзвертки давления при различный зйачениях внешних возмущающих воздейств.ий ( температура окружающей среды, блалсности, нестабильности питающих напряжений) выявляются номинальные характеристики, ,олл 2пож первого и второго датчиков соответственно, а также классы кривых, из которых с заданной точностью аппроксимации не выходят погрешности датчиков как функции отлич номинальных характеристик датчиков о их реальных функций преобразования в времени. Таким образом, реальные характери тики датчиков Б любой момент времени можно представить в виде Г Т PU) Кг Ч J 1 j V.i, Pt-fc) ном r-o . выходные сигналы первого и второго датчиков; тип- максимальные степени полиномов, описывающих функции отличия номинальных характеристик первог и второго датчиков соответственно от реальных функций преобразования вр времени; 01 и bj - коэффициенты разложения функций отличия первого и второго да чиков В степенной ряд. Эквивалентные значения опорного давления P(t) в любой момент времен определяется путем преобразования вы ходных сигналов датчиков по обратным номинальным характеристикам ) iMOH- первого и второго соответ ственно. Если номинальные характеристики датчиков не отличаются от реальных функций преобразования, то значения опорного давления в любые фиксиров ные моменты времени i , измеренны первым и вторым датчиком одновремен должны быть равны. Обозначим резуль таты измерений опорного давления в фиксированные моменты, времени i,, через ) и 2 / относящиеся к первому и второму датчикам соотве ственно. Отличие разности PIitn)-PjC-t) от нуля свидетельствует об отличии характеристик датчиков от реальных функций преобразования. Для любого момента времени t э разность дает информацию о взвешенной сумме обоих датчиков. Задача за ключается в разделении взвешенной суммы погрешностей на составляющие погрешностей каждого датчика. Р§злагая разность эквивалентного опорного давления в ряд Тейлора в окрес ностях точек, принадлежащих номинальным характеристикам и, учитывая что относительная величина погрешно тей каждого датчика не превышает нескольких процентов, для любого мо мента времени можно записать df/ t,i PUJ-,U,). -Uj-Sa t,u.) , 1тП В этом уравнении неизвестными и вляются коэффициенты а и bjбщее количество которых равно (rn-t-n 2) . Измеряя i,U).Vjtt), PAtK. PjCtx) фиксированные (in-t-n-t-2) моменты вреени t и решая систему уравнений 2), получим значения коэффициентов полиномов, описывающих ункции отличия номинальных характеистик датчиков от реальных. В процессе развертки опорного давения в момент времени t наступает авенство измеряемого Р и опорноо давлений Р Ct) . Измерив время , вычисляем значения функций отичия номинальных характеристик обоих атчиков от реальных в точке измереия РХ , значения ,и.z:Ъ:t, ЬО Jri) J . в момент времени t измеряются акже значения j (t х ) и Ид Ctx) выходых сигналов датчиков. Тогда скоррекированные результаты измерения давлеия Р, по обоим датчикам в соответ(1) вычисляют по твии с уравнением ормулам - Г i 1 .., .,UJ-.|b,tl. 2 -НО«| Измеряемое давление оценивается как среднее арифметическое скорректированных результатов измерений по вум датчикам р - . х- 2 К собственно измерительным эле- е ментам для реализации предлагаемого способа устройству развертки опорного давления, нуль-органу для сравнения и датчикам предъявляются минимальные требования. Устройство развертки и датчики могут иметь нестабильные во времени нелинейные характеристики. Здесь важным является то, что, изменяясь во времени, эти характеристики не выходят с заданной точностью аппроксимации из класса кривых, определенных статистически. Требование к нуль органу заключается лишь в достаточной чувствительности. Предлагаемый способ измерения даВ ления обеспечивает по сравнению с существующими следующие преимущества: возможность использования в измерительной системе непрецизионных линейных датчиков; отсутствие необходимости разработки и применения точных обратных преобразователей выходного сигнала датчика в измеряемое давление. Отмеченные преимущества показывают, что применение способа позволяет
свести разработку npeun3HOHfihix датчиков давления к разработке устропс цифровой обработки информации. Это повышает надежность измерительных устройств за счет использования простых датчиков, снижает технологически требования к изготовлению и позволяет производить их на неспециализированных предприятиях.
Способ может быть использован для повышения точности измерения таких физических величин, для которых существуют сравнивающие устройства ( (нуль-органы), имеются источники опорного сигнала, с устройствами развертки, и для измерения которых имеются датчики с различными характеристиками, желательно основанные на различных физических явлениях. Этим требованиям удовлетворяет большинство электрических величин как электрический ток (напряжение),.частота, сопротивление, индуктивность, емкость, фаза и др., и теплотехнических величин как давление, сила (масса), температура и др. При этом к устройствам развертки и датчикам предъявляются минимальные требования. Например, в качестве устройства развертки для измерения электрического тока (напряжения) может быть использован генератор пилообразного напряжения с нелинейной и нестабильной во времени характеристикой.
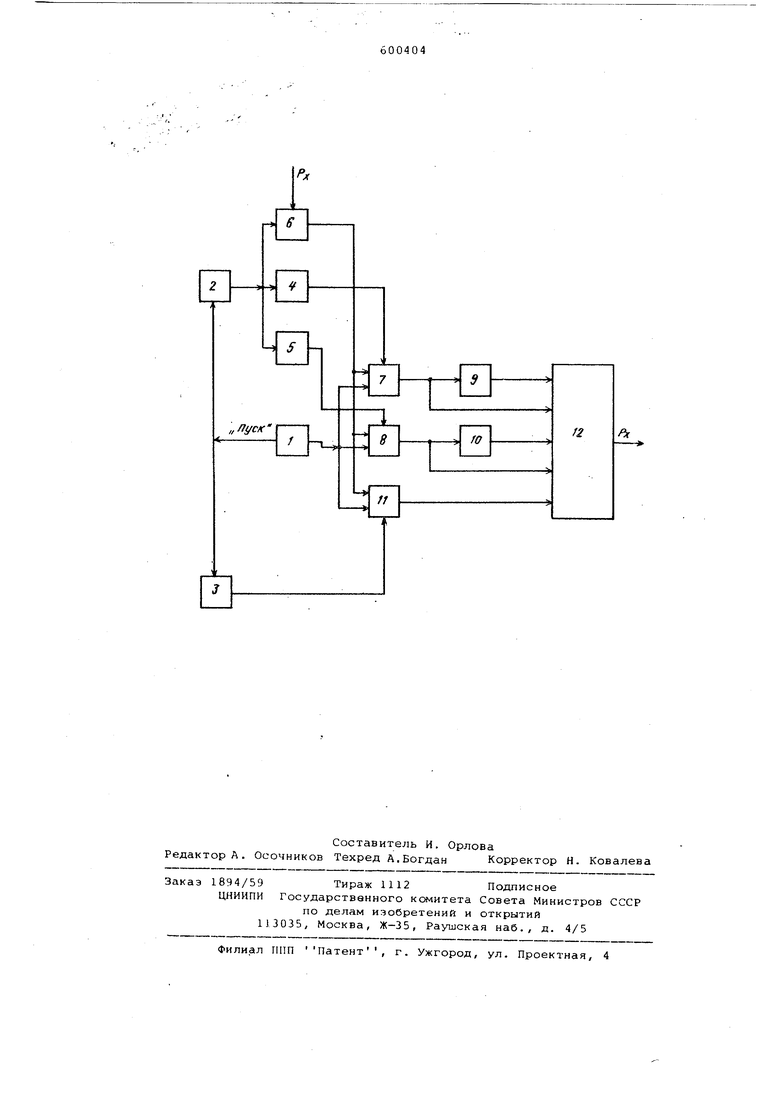
На чертеже показана блок-схема устройства для осуществления предлагаемого способа.
Устройство работает следующим образом.
По команде пуск от блока управления начинается развертка давления от источника 2 опорного давления и запускается электронный секундомер 3. Выходной сигнал источника опорного давления PCt) , монотонно изменяющийся во времени, подается на входы датчиков давления 4 и 5, а также на один вход нуль-органа 6, на другой вход которого подается, измеряемое давление P,i . Выходные сигналы датчиков 4 и 5 через электронные ключи 6и 8, которые синхронно открываются в
фиксированные моменты времени t импульсами от блока управления, поступают в соответствующие функциональные преобразователи 9 и 10. Этими же импульсами от блока управления открывается электронный ключ 11. В момент равенства Р и Р()нуль-орган 6 выдает импульс, который также управляет ключами 7, 8 и 11. Выходные сигналы датчиков 4 и 5 через ключи 7 и 8, соответствующие моментам времени tj и моменту времени сравнения, а также выходные сигналы функциональных преоразователей 9 и 10 непосредственно и электронного секундомера 3 череа ключ 11 поступают в вычислительное устройство 12 для обработки результатов измерений, который выдает значение измеряемого давления Р .
Формула изобретения
Способ измерения давления г1утем сравнения измеряемого давления с монотонно изменяющимся во времени опорным давлением, отличающийс я тем, что, с целью повышения точности, опорное давление измеряют одновременно двумя датчиками с произвольными характеристиками в гп - 2 моменты времени в период изменения опорного давления, гдеm и п- степени полиномов функций отличия номинальных характеристик каждого датчика от их реальных функций преобразования, определяют эти функции отличия по полученным 2 () значениям выходных сигналов датчиков, на основании которых судят о величинах погрешностей для каждого датчика в момент равенства измеряемого и опорного давлений, после чего, вводя эти значения погрешностей в фактически полученные результаты измерения, определяют измеряемую величину.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР 220580, G 01 U 11/00, 1963.
2.Авторское свидетельство СССР t) 253440, G01 С, 11/00, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции функции преобразования измерительного преобразователя для интегрирующей системы | 1987 |
|
SU1531112A1 |
| Устройство для определения интегрального значения изменяющегося во времени измерительного сигнала | 1987 |
|
SU1541635A1 |
| УСТРОЙСТВО ДЛЯ КОДИРОВАНИЯ ВЕЛИЧИН | 1971 |
|
SU293298A1 |
| Цифровой термометр | 1981 |
|
SU991185A2 |
| СПОСОБ КОРРЕКЦИИ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 1996 |
|
RU2130194C1 |
| СПОСОБ И УСТРОЙСТВО ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2006 |
|
RU2304762C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАВЛЕНИЯ ЖИДКОСТИ ИЛИ ГАЗА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2789106C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАВЛЕНИЯ | 2010 |
|
RU2418275C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЭЛЕКТРИЧЕСКИХ И НЕЭЛЕКТРИЧЕСКИХ ВЕЛИЧИН | 1997 |
|
RU2193211C2 |