(54) БЕЗРЕЛКТИВНЫЙ ДВИГАТЕЛЬ
| название | год | авторы | номер документа |
|---|---|---|---|
| Ручная сверлильная машина | 1981 |
|
SU1018810A1 |
| НАКОПИТЕЛЬ МЕХАНИЧЕСКОЙ ЭНЕРГИИ | 2013 |
|
RU2523363C1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820104A1 |
| Безреактивный двигатель | 1978 |
|
SU769157A1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820105A1 |
| БЕЗИНЕРЦИОННЫЙ ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073805C1 |
| Коробка передач | 1990 |
|
SU1761557A1 |
| ПРЕОБРАЗОВАТЕЛЬ КРУТЯЩЕГО МОМЕНТА | 1992 |
|
RU2049284C1 |
| ЦЕНТРОБЕЖНАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 1997 |
|
RU2151331C1 |
| АВТОМОБИЛЬНЫЙ СТАРТЕР-ГЕНЕРАТОР | 1997 |
|
RU2150602C1 |
Изобретрнио отжхлггся к цеталям машин и может быть гцл1.м«ирио как явигатоль, не создающий рлактиш 01-о момонта для ciicTeNv работающих IR 1Ш&;.;омсх;ти, на плаву или для летательных типа вертолета.
Иэвест гы безух активньге двигатели на ос- нойе маховика-аккулулятора энергии, miTaeмого от встроеннс 1-р элект зодв1 гателя или другого источника г норгни во время -чаряд-ки и вьщеляюшего э1гс;)П1ю в виде крутяш.его момента на исполнительном органе, например, сверле 1J .. Такая конструкция имеет высокую скорость вращения исполнительного органа - сверла, HGнocfX5дcтвeннo связанного с маховиком.
Известен бпареактивный маховишьгй двигатель, содержащий г ерметичный корпус, маховик с осью и со вст{юенным электродвигателем и механическую систему отбора мощности 23.
В этой конструкции необходимо герметизировать выходной вал, если маховик В|5вшается в среде с малыми вен-, алтхиоиными потерями, например вакууме или водороде. Навестно, что такая герметизация с чеиь сложна
особенно при Ш-Гсокнх CKOJ XVI-H.X и ирз-тярщх
NfONfCrrax.
H3o5i:X; Tf4 nn ягу1Я(тс-я oryjinjviBKn мощности, oTGHpac fov1 от tHxoBiiKa и .мр, вонтнляниот 11ьгх noropi...
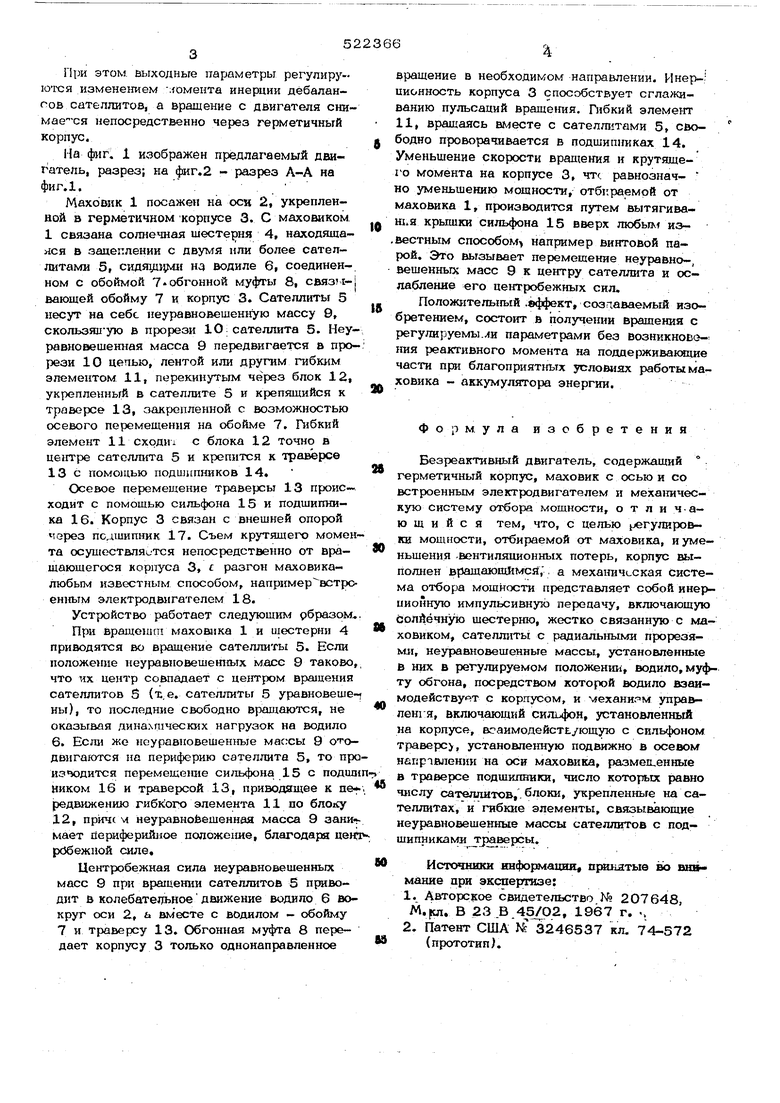
Это достнгается T-JM, что К(;ч1ус пт,Г11()л-нон вращающимся, п ыоклии;х хпя сисюма отбору мотпнсюч-и щк-псгашшс-т гоГоЛ пш;} ниониую им11ульсиВ11 Т: ио1Хдач.у, пкпючлкицую солиочную шостсрмю, ж(х;ткг СИЯ .чнную с маховиком, сателлит1лГ с t.fn )cnHми, неуравновешеннып Mocc-t, уг-1,1П(влонньге в них в рогулирурмом нолоя- иии, видпло, муфту обгона, посредством котогги впцило взаимодействует с KOpirycoM, и МОХ.ЧТ1ИЧМ управления, включающий сил1зфоп, установленный на корпусе, а- аимопействуюшую с сил11фоном траверсу, установленную подвижно в осевом направлении на оси маховика, размещенные в траверсе подщипники, число которьгх равно числу сйтеллитов, блоки, укрепленные на сателлитах, и гибкие элементы, свялываю- щие неуравновешенные массы сателлитов с подшипниками траверсы. При этом, выходные параметры регулируются изменеигием ;{омента инерции дёбаланпов сателлитов, а вращение с двигателя снимае ся непосредственно через герметичный корпус. На фиг, 1 изображен предлагаемый двигатель, разрез; на фиг.2 - разрез А-А на фиг.1. Маховик 1 посажен на оси 2, укрепленной в герметичном корпусе 3. С маховиком 1 связана солнечная шестерня 4, находящаяся в зацеплении с двумя или более сателлитами 5, СИДЯ1ДЦМИ на водиле 6, соединенном с обоймой 7-обгонной муфггы 8, связывающей обойму 7 И корпус 3. Сателлиты 5 несут на себе неуравновешенную массу 9, скользяц-ую в прорези 10; сателлита 5. Неуравновешенная масса 9 передвигается в прорези 10 цепью, лентой или другим гибким элементом 11, перекинутым через блок 12, укрепленный в сателлите 5 и крепящийся к траверсе 13, закрепленной с возможностью осевого перемещения на обойме 7, Гибкий элемент 11 сходиi с блока 12 точно в центре сателлита 5 и крепится к траверсе 13с помо)цью подшипников 14. Осевое неромешение траверсы 13 проис ходит с помощью сильфона 15 и подшипника 16. Корпус 3 связан с внешней опорой через подшипник 17. Съем крутящего момен та осуществляется непосредственно от вращающегося корпуса 3, i разгон маховикалюбьп л известным способом, например встро енным электродвигателем 18. Устройство работает следующш рбразом При вращении маховика 1 и шестерни 4 приводятся во вращение сателлиты 5. Если положение неуравновешенных масс 9 таково что их центр совпадает с центром вращения сателлитов 5 (х.е. сателлиты 5 уравновеще ны), то последние свободно вращаются, не оказывая дина.хгпческих нагрузок на водило 6. ЕСЛИ же неуравновешенные массы 9 отодвигаются на периферию сателлита 5, то пр из«юдится перемещение сильфона 15 с подш НИКОМ 16 и траверсой 13, приводящее к пе редвижению гибкого элемента 11 по бло«су 12, причс м нeypaвнofeeщeннaя масса 9 зани мает периферийное положение, благодаря цен рббежной силе, Центробежная сила неуравновешенных масс 9 при вращении сателлитов 5 приводит в колебатещ.ное движение водило 6 во круг оси 2, а вместе с водилом - обойму 7 и траверсу 13. Обгонная муфта 8 передает корпусу 3 Только однонаправленное вращение в необходимом направлении. Инер-; ционность корпуса 3 способствует сглаживанию пульсаций вращения. Гибкий элемент 11, вращаясь вместе с сателлитами 5, свободно проворачивается в подшипниках 14. Уменьшение скорости вращения и крутящего момента на корпусе 3, чтс равнозначо уменьшению мощности, отбираемой от маховика 1, производится путем вытягиваш.я крышки сильфона 15 вверх любьш известным способом например винтовой парой. вызывает перемещение неуравно-, вешенных масс 9 к центру сателлита и ocl лабление его центробежных сил. Положителыш1й .аффект, создаваемый изобретением, состоит в получении вращения с регулируемыми параметрами без возникносо-: ггая реактивного момента на поддерживакицие части при благоприят1гых условиях работы маховика - аккумулятора энергии. Формула изобретения Безреактивный двигатель, содержащий ° герметичный корпус, маховик с осью и со встроенным электродвигателем и механическую систему отбора мощности, о т л и ч-а- ю ш и и с я тем, что, с целью tJeгyлиpoвки мощности, отбираемой от мах:овика, иуменьщения .вентиляционных потерь, корпус выполнен вращающимся,. а механическая система отбора мощности представляет собой инерционную импульсивную передачу, включающую солйёчную шестерню, жестко связанную с маховиком, сателлить с радиальными прорезями, неуравновешенные массы, установленные в них в регулируемом положении, водило, муфту обгона, посредством которой водило взаимодействует с корпусом, и механизм упр)ав- лен1 я, включающий сильфом, установленный на корпусе, всаимодейстЕ/ющую с сильфоном траверсу, установленную подвижно в осевом направлении на оси маховика, размешенные в траверсе подшипники, число которых равно числу сателлитов,.блоки, укрепленные на сателлитах, и гибкие элементы, связывающие неуравновешенные массы сателлитов с подшипниками тJзaвepcы. Источншш информации п шкятые во мание при экспертизе: 1.Авторское свидетельство № 207648, М.рл. В 23.В., 1967 г. ., 2.Патент США 1 246537 кл, 74-572 (прототип).
/16 т 11
rrtx- //
15
Of
rt
-5
F
|ьЧн| -i
-Г -J
jJ-7
Фие,2
