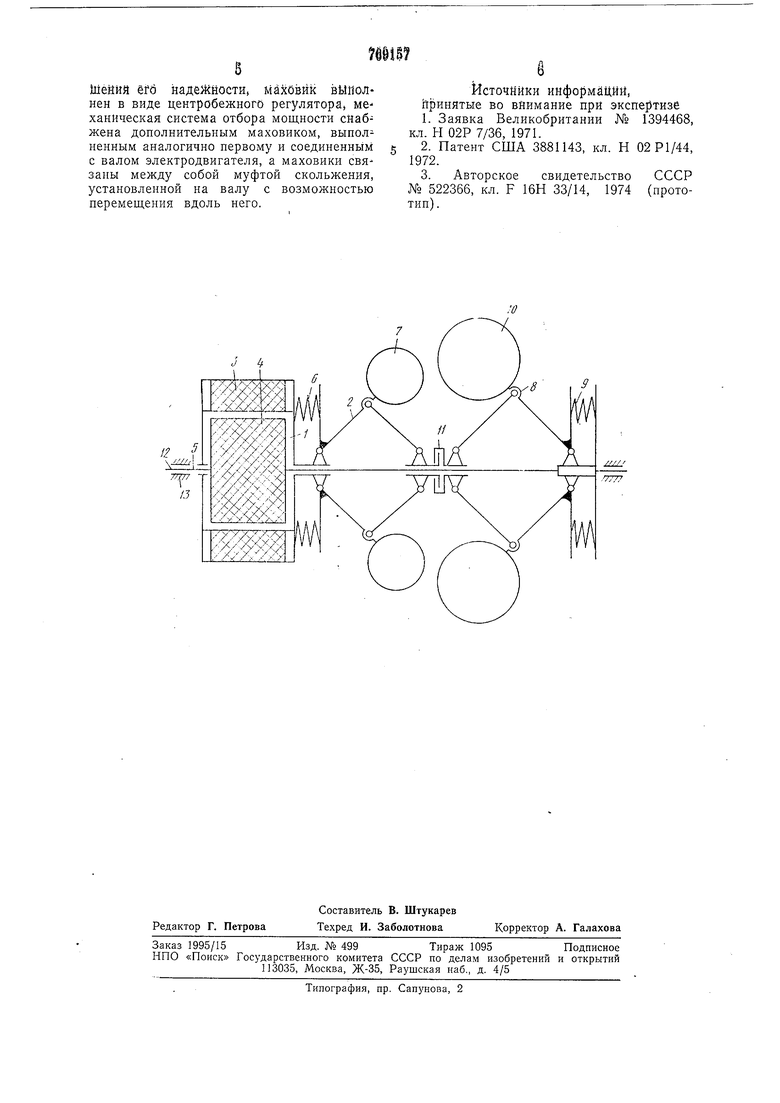
-- : ; .::: / 5 v. И сйльфомом tpafiepcy, устройленную подвижно в осевом направлёнии;1на оси маховика, размещенные в траверсе подшипники, число которых равно числу сателлитов, бло: ки, укрепленные на сателлитах, и гибкие элементы, связывающие неуравновешенные массы сателлитов с подшипниками траверсы. Недостатком двигателя является то, что при регулировании числа оборотов двигателя изменяется его мощность, что неприемлемо для машин, у которых уменьшение числа оборотов связано с увеличением нагрузки на рабочем органе, а также необходимо внешнее воздействие для регулирования мошности. Кроме того, недостатком известного устройства является относительно малая надежность в связи с использованием дебалансов на сателлитах, что приводит к быстрому износу осей сателлитов, и сложность конструкции, включающей импульсивную передачу и систему управления ею. Целью изобретения является повышение надежности. Это достигается тем, что маховик выполнен в виде центробежного регулятора, механическая система отбора мощности снабжена дополнительным маховиком, выполненным аналогично первому и соединенным с валом электродвигателя, а маховики связаны между собой муфтой скольжения, установленной на валу с возможностью перемещения вдоль него. На чертеже изображена кинематическая схема устройства. Безреактивный двигатель содержит электродвигатель 1, маховик 2, жестко соединенный с корпусом 3 электродвигателя 1. Ротор 4 (внутренняя часть) жестко связан с выходным валом 5. Маховик 2, выполненный с переменным распределением масс, имеет конструкцию центробежного регулятора и содержит подпружиненные с помощью упругих элементов 6 противовесы 7. Механическая система отбора мощности снабжена дополнительным маховиком 8, выполненным аналогично .первому, и включает подпружиненные с помощью упругих элементов 9 противовесы 10. Маховики 2 и 8 соединены между собой муфтой 11 скольжения, установленной на валу 5 с возможностью перемещения вдоль него при независимом вращении маховиков 2 и 8. Вал 5 установлен в подшипниках 12 основания 13. Безреактивный двигатель работает следующим образом. При включении электродвигателя 1 его внешняя часть - корпус 3 и внутренняя - ротор 4 начинают вращаться в противоположные стороны. При этом внешняя часть - корнус 3 свободно вращается на валу 5 как на оси совместно с маховиком 2. :- . 4 : : Вму1реММйй,, Часть.-jOTop 4. -ЁраЩайся совместно с Ьыхбдным валом-5 и-С: укрепленным на нем маховиком 8. Вал 5 установлен на подшинниках 12.основания 13 и не передает на Основание 13 реа1 тивный момент. Подпружиненные с помощью упругих элементов 6 и 9 противовесы и 10 маховиков 2 и 8 под действием центробежных сил расходятся и передают динамические усилия на муфту11,соединяющую маховики 2 и 8 между собой. Под действием этих усилий муфта И устанавливается в положении равновесия. Таким образом, муфта 11 замыкает кинематическую цеиь от внешней части - корнуса 3 электродвигателя 1 к внутренней - ротору 4. В зависимости от нагрузки (крутящего момента М) на выходном валу 5 автоматически устанавливаются скорость его вращения и положение муфты 11, соединяющей маховики 2 и 8, при постоянной мощности электродвигателя 1. При этом к внешней части электродвигателя 1 прикладывается противодействуюЩий крутящий момент от противодействия маховика 2 раскручиванию и увеличению его момента инерции; При установившемся режиме движения, соответствуюшем приложенному к выходному валу 5 крутящему моменту, возможны некоторые колебания скорости вращения внешней и внутренней частей электродвигателя 1 относительно соответствуюших средних скоростей их вращения. Эти колебания связаны с перераспределением инерционных нагрузок между маховиками 2 и 8 с помощью муфты. Они сглаживаются инерционностью маховиков 2 и 8. При этом противовесы 10 маховика 8 под действием уиругих элементов 9 сближаются, а противовесы 7 маховика 2 под действием центробежных сил расходятся. В результате муфта И перемещается влево по чертежу и занимает новое положение равновесия. При уменьшении нагрузки на валу 5 скорость его вращения увеличивается, а муфта 11 смещается вправо. Конструкция безреактивного двигателя является полностью уравновешенной, что обеспечивает малый износ деталей и высокую надежность. Следует отметить также простоту конструкции, включающей помимо электродвигателя лишь два взаимодейтвующих посредством муфты маховика переменным раснределеннем масс. Формула изобретения Безреактивный двигатель, содержаший лектродвигатель, маховик, жесткое соедиенный с корпусом электродвигателя, и меаническую систему отбора мошности, о тичающийся тем, что, с делью новы5
ШеЁИй ёГб надежности, махбвйк выполнен в виде центробежного регулятора, механическая система отбора мощности снабжена дополнительным маховиком, выполненным аналогично первому и соединенном с валом электродвигателя, а маховики связаны между собой муфтой скольжения, установленной на валу с возможностью перемещения вдоль него.
6
ИСТОЧНИКИ информации, йринятые во вйимание при экспертизе
1.Заявка Великобритании № 1394468, кл. Н 02Р 7/36, 1971.
2.Патент США 3881143, кл. Н 02Р1/44, 1972.
3.Авторское свидетельство СССР № 522366, кл. F 16Н 33/14, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Безреактивный двигатель | 1974 |
|
SU522366A1 |
| ЧЕТЫРЕХТАКТНЫЙ РОТОРНО-ЛОПАСТНОЙ ТАНГЕНЦИАЛЬНЫЙ ДВИГАТЕЛЬ ИВШИНА | 2000 |
|
RU2212545C2 |
| ГИБРИДНЫЙ СИЛОВОЙ АГРЕГАТ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2357876C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2198307C2 |
| ОБЪЕМНАЯ МАШИНА САВИНА | 1992 |
|
RU2016241C1 |
| ЦЕНТРОБЕЖНАЯ БЕССТУПЕНЧАТАЯ ПЕРЕДАЧА | 1997 |
|
RU2151331C1 |
| МЕХАНИЗМ, ВЫРАБАТЫВАЮЩИЙ КИНЕТИЧЕСКУЮ ЭНЕРГИЮ (ДВИГАТЕЛЬ МЕХАНИЧЕСКИЙ) | 2006 |
|
RU2319860C1 |
| ГИРОСКОПИЧЕСКО-ЦЕНТРОБЕЖНОЕ УСТРОЙСТВО | 1992 |
|
RU2084826C1 |
| Установка для экспериментального исследования вынужденных крутильных колебаний | 1957 |
|
SU114965A1 |
| Стартер для двигателя внутреннего сгорания | 1989 |
|
SU1701969A1 |
J
9
/////
