1
Изобретение относится к измерительной технике и может быть использовано во все областях машиностроения, где необхсдимо для определения параметров п аижения объекта измерять величину и вектор полного линейного ускорения.
Известны струнные трехосные акселерометры, содержащие инерционную массу, закрепленную в точке пересечения струн, постоянные магниты 2.
Наиболее близким по технической сущности к предлагаемому является акселерометр, содержащий корпус, внутри которого натянуты три токопроводящие струны, совпадающие с ортогональными чувствительности прибора. В точке пересечется струн закреплена инерционная масса, образующая три пары соосны.х струн. Каждая соосная струна расположена в поле постоянного магнита и включена в свою схему автогенератора, выдающего частоту, пропорциональную величине натяжения. Разность частот пары соосных струн пропорциональна проекции полного ускорения на данную ось, а геометрическая сумма разностей
частот трех пар струн характеризует величину и направление полного линейного ускорешая 1.
Колеблющая струна, как преобразователь силы в частоту, обладает хорошими техническими характеристиками - высокой чувствительностью и стабильностью. Однако существенным недостатком ее является нелинейная зависигч-ость частоты колебаний от силы натяжения- /-р-
Т
где1 - частота;
р - натяжение тп - распределенная масса; Е - длина.
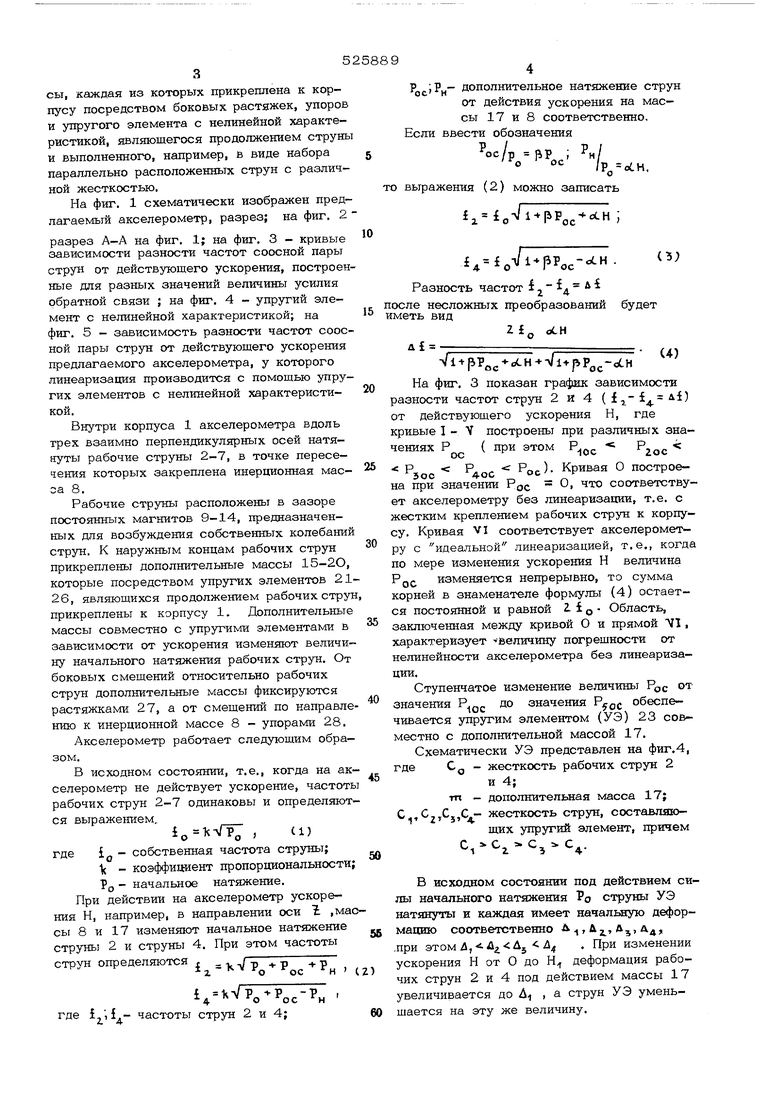
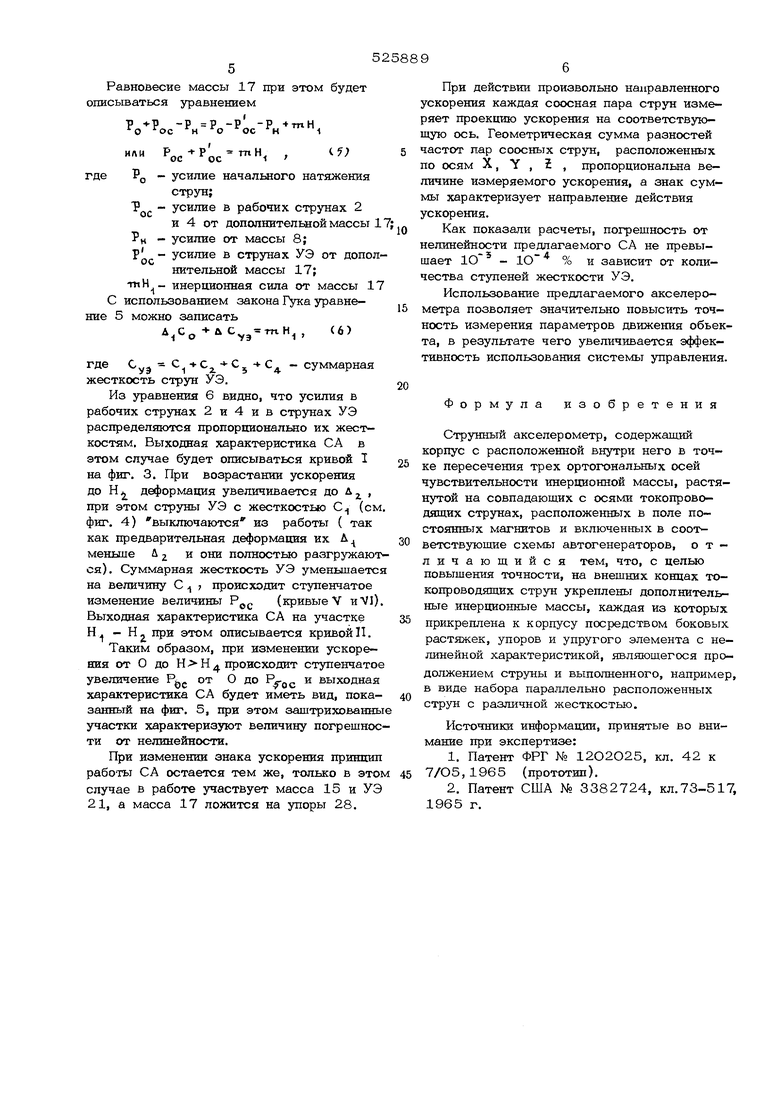
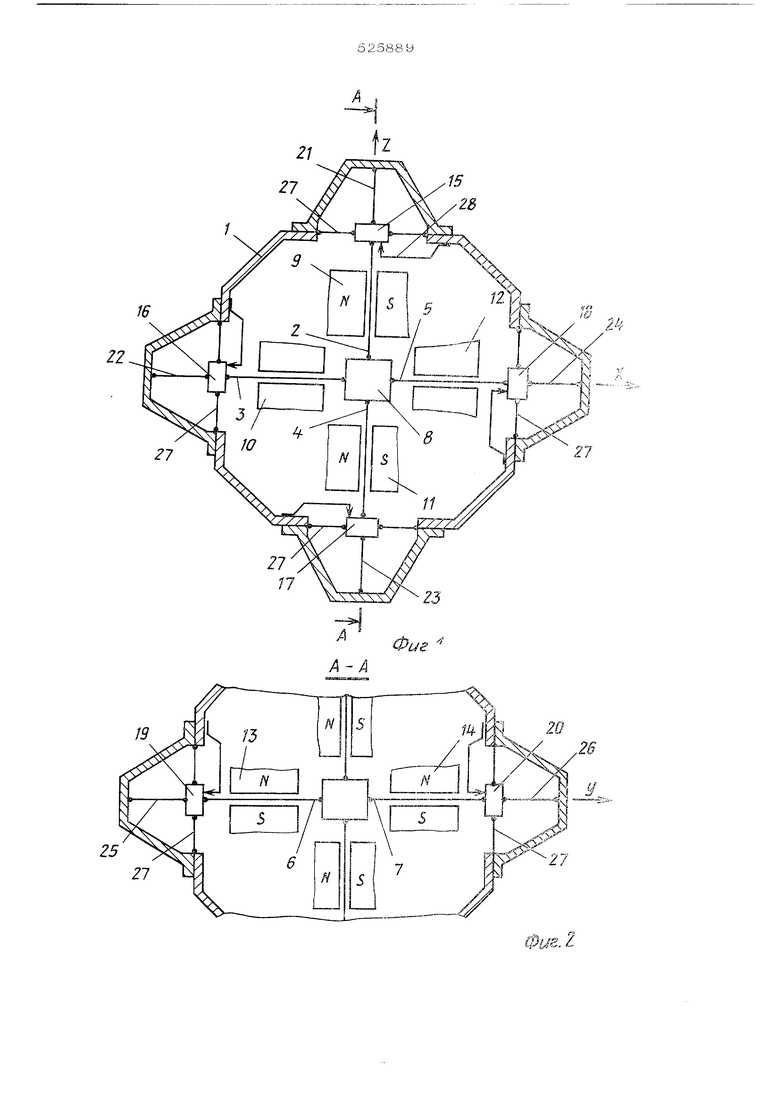
Дифференциальное включение струн улучшает линейность. Однако струнные акселероме-тры, построенные по схеме с жестким креплением струн к корпусу, имеют погрешность от нелинейности порядка 0,5+1%, что в некоторых случаях является неприемлемым Цель изобретения - повышение точности. Для этого в предлагаемом акселерометре на внешних концах токопроводящих струн укреплены дополнительные инерционные маесы, каждая из которых прикреплена к корпусу посредством боковых растяжек, упоров и упругого элемента с нелинейной характеристикой, явл5пощегося продолжением струны и выполненного, например, в виде набора параллельно расположенных струн с различной жесткостью. На фиг. 1 схематически изображен предлагаемый акселерометр, разрез; на фиг. 2 разрез А-А на фиг. 1; на фиг. 3 - кривые зависимости разности частот соосной пары струн от действующего ускорения, построен ные для разных значений величины усилия обратной связи ; на фиг. 4 - упругий элемент с нелинейной характеристикой; на фиг. 5 - зависимость разности частот соосной пары струн от действующего ускорения предлагаемого акселерометра, у которого линеаризация производится с помощью упругих элементов с нелинейной характеристикой. Внутри корпуса 1 акселерометра вдоль трех взаимно перпендикулярных осей натянуты рабочие струны 2-7, в точке пересечения которых закреплена инерционная масоа 8. Рабочие струны расположены в зазоре постоянных магнитов 9-14, предназначенных для возбуждения собственных колебаний струн. К наружным концам рабочих струн прикреплены дополнительные массы 15-2О, которые посредством упругих элементов 21 26, являющихся продолжением рабочих струн прикреплены к корпусу 1, Дополнительные массы совместно с упругими элементами в зависимости от ускорения изменяют величину начального натяжения рабочих струн. От боковых смещений относительно рабочих струн дополнительные массы фиксируются растяжками 27, а от смещений по направле шпо к инерционной массе 8 - упорами 28. Акселерометр работает следующим образом. В исходном состоянии, т.е., когда на акселерометр не действует ускорение, частоты рабочих струн 2-7 одинаковы и определяются выражением, i) где i/j - собственная частота струны; V - коэффициент пропорциональности; РО - начальное натяжение. При действии на акселерометр ускорения Н, например, в направлении оси 1 ,мас сы 8 и 17 изменяют начальное натяжение струны 2 и струны 4. При этом частоты струн определяются Н ( i.. Р -Р ос н где f , частоты струн 2 и 4; дополнительное натяжение струн от действия ускорения на массы 17 и 8 соответственно, ЕСЛИ ввести обозначения о выражения (2) можно записать ii fo i pioc ; f i Vl-pP,-ctH. Разность частот осле несложных преобразований будет иметь видf оСН На фиг. 3 показан график зависимости разности частот струн 2 и 4 (. от действующего ускорения Н, где кривые I - V построены при различных значениях Р ( при этом Р. Ргос ; РОС). Кривая О построена при значении - О. что соответствует акселерометру без линеаризации, т.е. с жестким креплением рабочих струн к корпусу. Кривая VI соответствует акселерометру с идеальной линеаризацией, т.е., когда по мере изменения ускорения Н величина PQ(. изменяется непрерывно, то сумма корней в знаменателе формулы (4) остается постоянной и равной 2. Q - Область, заключенная между кривой О и прямой VI, характеризует --величину погрещности от нелинейности акселерометра без линеаризации. Ступенчатое изменение величины от значения Р. до значения . обеспечивается упругим элементом (УЭ) 23 совместно с дополнительной массой 17. Схематически УЭ представлен на фиг.4, где о жесткость рабочих струн 2 т - дополнительная масса 17; C,C2,Cj,C - жесткость струн, составляющих упругий элемент, причем 1-4 .-v в исходном состоянии под действием силы начального нат11жения РО струны УЭ натянуты и каждая имеет начальную деформацюо соответственно Л , Д j,, д ,, Лд, .при этом Л, Л . При изменении ускорения Н от О до Н,, деформация рабочих струн 2 и 4 под действием массы 17 увеличивается до Л , а струн УЭ уменьщается на эту же величину. Равновесие массы 17 при этом будет описываться уравнением р -i-p -р р -р -р +тпН О о ос н Р - Р ос ос - усияие начального натяжения струн; Т - усилие в рабочих струнах 2 и 4 от дополнительной массы 1 н - усилие от массы 8; р - усилие в струнах УЭ от допол нительной массы 17; инерционная сила от массы 1 С использованием закона Гутса уравнение 5 можно записать . С 5 - С - суммарная 1 жесткость струн УЭ. Из уравнения 6 видно, что усилия в рабочих струнах 2 и 4 и в струнах УЭ распределяются пропорционально их жесткостям. Выходная характеристика СА в этом случае будет описываться кривой I на фиг. 3. При возрастании ускорения до Н деформация увеличивается до Д , при этом струны УЭ с жесткостью С (см фиг. 4) выключаются из работы ( так как предварительная деформация их Л, меньше Л и они полностью разгружаю ся). Суммарная жесткость УЭ уменьшаетс на величину С происходит ступенчатое изменение величины Р (кривые V иЛ/ Выходная характеристика СА на участке Н . - Н, при этом описывается кривойII. Таким образом, при изменении ускореЕЕИя от О до Н Н происходит ступенчато увеличение Р. от О до выходная характеристика СА будет иметь вид, пока занный на фиг. 5, при этом заштрихованн участки характеризуют величину погрешно ти от нелинейности. При изменении знака ускорения пришш работы СА остается тем же, только в это случае в работе участвует масса 15 и УЭ 21, а масса 17 ложится на упоры 28. При действии произвольно направленного ускорения каждая соосная пара струн измеряет проекцию ускорения на соответствуюшую ось. Геометрическая сумма разностей частот пар соосных струн, расположенных по осям X, Y , Z , пропорциональна величине измеряемого ускорения, а знак суммы характеризует направление действия ускорения. Как показали расчеты, погрешность от нелинейности предлагаемого С А не превышает 1О - 1О % и зависит от количества ступеней жесткости УЭ. Использование предлагаемого акселерометра позволяет значительно повысить точность измерения параметров движения объекта, в результате чего увеличивается эффективность использования системы управления. Формула изобретения Струнный акселерометр, содержаший корпус с расположенной внутри него в точке пересечения трех ортогональных осей чувствительности инерционной массы, растянутой на совпадающих с осями токопроводящих струнах, расположенных в поле постоянных магнитов и включенных в соответствующие схемы автогенераторов, отличающийся тем, что, с целью повышения точности, на внешних концах токопроводящих струн укреплены дополнительные инерционные массы, каждая из которых прикреплена к корпусу посредством боковых растяжек, упоров и упругого элемента с нелинейной характеристикой, являющегося продолжением струны и выполненного, например, в виде набора параллельно расположенных струн с различной жесткостью. Источники информации, принятые во внимание при экспертизе: 1.Патент ФРГ № 12О2О25, кл. 42 к 7/05,1965 (прототип). 2.Патент США № 3382724, кл.73-517, 1965 г.
-pu.l Ускорение
Фиг.З Ни и
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИФФЕРЕНЦИАЛЬНЫЙ СТРУННЫЙ АКСЕЛЕРОМЕТР И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2004 |
|
RU2258230C1 |
| Струнный акселерометр | 1972 |
|
SU452787A1 |
| Дефференциальный струнный акселе-POMETP | 1978 |
|
SU838587A1 |
| Струнный акселерометр | 1978 |
|
SU732751A1 |
| Струнный акселерометр | 1976 |
|
SU705347A1 |
| Частотный датчик ускорения | 1980 |
|
SU1000916A1 |
| СТРУННЫЙ АКСЕЛЕРОМЕТР | 2005 |
|
RU2292050C2 |
| Струнный акселерометр | 1979 |
|
SU847213A1 |
| СТРУННЫЙ АКСЕЛЕРОМЕТР | 1980 |
|
SU1840331A1 |
| СТРУННЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2528103C1 |
--:i /7t -утг-в-а-е /----J I I I I Ускорение HJ Фиг.1 HI H H Фиг. 5
