1
Изобретение относится к измерительной технике и касается линейного индукпионного датчика углового перем-ещения, предназначенного для использования в системах автоматического управления.
По авт. св. № 331254 известен линейный индукщионный датчиК углового перемещения, содержащий кольцевые статор и ротор. При этом статор снабжен зубцом с расположенной в нем обмоткой возбуждения, а ротор - поперечным пазом, в который уложена выходная обмотка, охватывающая опинку ротора.
Крутизна выходной характеристики известного датчика зависит от нагрузк-и. Объясняется это экранирующим действием выходной обмотки.
Целью изобретения является повышение стабильности крутизны выходной характеристики и увеличение выходной мощности в условиях изменяющейся нагрузки.
Это достигает ся тем, что ротор снабжен короткозамкнутой обмоткой, которая равномерно распределена по полеречным , в том числе и в пазу выходной обмотки.
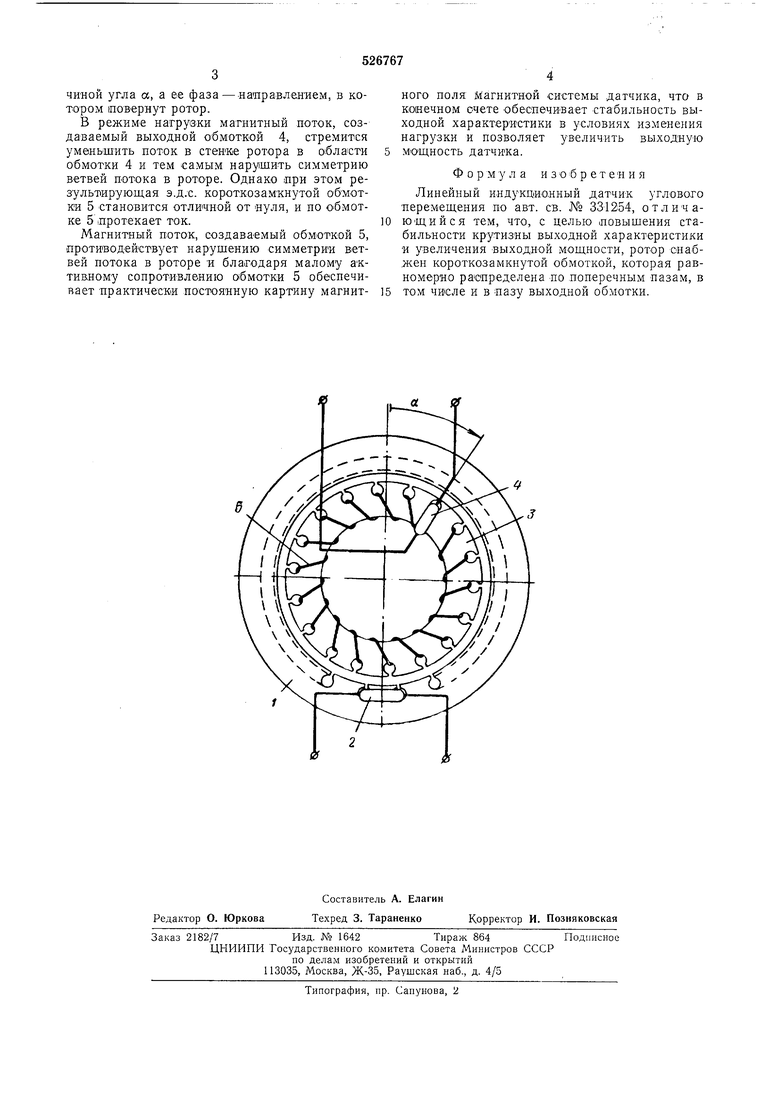
На чертеже схематически изображен предлагаемый датчик.
Он содержит щихтованный статор 1, на одном из зубцов которого расположена сосредоточенная обмотка возбуждения 2 и шихтованный ротор 3 с сосредоточенной кольцевой выходной обмоткой 4 и равномерно распределенной по ходам тороидальной короткозамкнутой обмоткой 5. Датчпк работает следующим образом.
Магнитный поток, создаваемый обмоткой 2, замыкается через зубец статора, на котором расположена обмотка, воздушный зазор под ним и магнитояровод ротора и распределяется на остальной части воздушного зазора. В магнитопроводе ротора поток разветвляется на две части, которые наводят в короткозамкнутой обмотке 5 две встречно направленные э.д.с.
В режиме холостого хода в силу электромагнитной симметрии обе ветви магнитного лотока в роторе однна-ковы. Величина потока равна нулю в сеченки ротора, максимально удаленном от обмотки 2, и линейно возрастает по мере приближения к ней. Результирующая э.д.с. короткозамкнутой обмотки 5 равна нулю независимо от угла поворота ротора, и ток по этой обмотке не протекает. Следовательно, обмотка 5 в режиме холостого хода не Оказывает влияния на работу датчика.
В положении ротора, при котором а 0, потокосцепление выходной обмотки 4 равно ну.тю, и сигнал на выходе датчика отсутствует. Если ротор повернут на некоторый угол а, то величина э.д.с. обмотки 4 определяется велцчиной угла ос, а ее фаза - «аиравлением, в котором иовернут ротор.
В режиме нагрузки магнитный поток, создаваемый выходной обмоткой 4, стремится уменьшить поток в стенке ротора в области обмотки 4 и тем самым нарушить симметрию в-етвей потока в роторе. Однако при этом результирующая э.д.с. короткозамкнутой Обмотки 5 становится отличной от нуля, и по Обмотке 5 протекает ток.
Магнитный поток, создаваемый обмоткой 5, противодействует нарушению симметрии ветвей потока в роторе и благодаря малому активлому сопротивлению 01бмотки 5 обеспечивает npaKTHqecKH постоянную картину магнитного поля лМагнитной системы датчика, что в конечном счете обеспечивает стабильность выходной характеристики в условиях изменения нагрузки и позволяет увеличить выходную мошность датчика.
Форм у л а изобретения
Линейный индукциолный датчик углового перемеш,ения по авт. св. № 331254, отличающийся тем, что, с целью повышения стабильности крутизны выходной характеристики и увеличения выходной мощности, ротор снабжен короткозамкнутой обмоткой, которая равномерно распределена по поперечным пазам, в
том числе и в пазу выходной обмотки.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| ЛИНЕЙНЫЙ ИНДУКЦИОННЫЙ ДАТЧИК УГЛОВОГО ПЕРЕМЕЩЕНИЯ | 1972 |
|
SU331254A1 |
| Трансформаторный датчик угла поворота | 1988 |
|
SU1516763A1 |
| Трансформаторный датчик угла | 1988 |
|
SU1610246A1 |
| СТАТОР РЕВЕРСИВНОГО АСИНХРОННОГО ДВИГАТЕЛЯ | 1994 |
|
RU2121206C1 |
| ДАТЧИК ПОЛОЖЕНИЯ | 1970 |
|
SU261215A1 |
| БЕСКОНТАКТНЫЙ ДАТЧИК УГЛОВОГО ПЕРЕМЕЩЕНИЯ | 1991 |
|
RU2006790C1 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2005 |
|
RU2302692C9 |
| ТРЕХФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1993 |
|
RU2088027C1 |
| МЕХАТРОННОЕ УСТРОЙСТВО | 2013 |
|
RU2543522C2 |
д
