Изобретение относится к области гироскопического приборостроения и может быть использовано при разработке гироскопов с упругим вращающимся подвесом, например динамически настраиваемых гироскопов (ДНГ), хорошо известных в технической литературе [1, 2] . В таких гироскопах маховик-носитель кинетического момента связан с валом привода посредством упругого подвеса, обеспечивающего свободу угловых перемещений маховика относительно вала. Используются ДНГ в качестве чувствительных элементов как платформенных, так и бесплатформенных инерциальных навигационных систем (БИНС) летательных аппаратов. Во всех БИНС, где ДНГ используется в качестве датчика угловой скорости (ДУС), и в большинстве платформенных систем от датчика момента (ДМ) гироскопа требуется стабильная линейная моментная характеристика, поэтому применяется магнитоэлектрический ДМ.
Работа такого датчика основана на законе Ампера [3] , определяющем силу взаимодействия постоянного магнитного поля с проводником, по которому течет ток. В известных конструкциях ДНГ [4,5] магнитоэлектрический ДМ реализован следующим образом. Якорем датчика является маховик гироскопа, выполненный в виде П-образного магнитопровода, в котором установлен постоянный магнит или ряд магнитов, создающих в зазоре магнитопровода постоянное поле, вектор магнитной индукции которого направлен радиально. Статор датчика представляет собой расположенные в зазоре якоря четыре равномерно расположенные по окружности обмотки, закрепленные на корпусе гироскопа.
В соответствии с законом Ампера на элементарный участок обмотки длиной dl, по которой течет ток I, в направлении, перпендикулярном вектору В магнитной индукции, действует сила
dP= I•B•dl (I)
Точно такая же сила, но противоположная по направлению, действует на якорь датчика, т. е. на маховик гироскопа. Создаваемый этой силой момент, приложенный к гироскопу, определяется формулой:
где Fδ - намагничивающая сила, создаваемая постоянным магнитом в зазоре, связанная с индукцией В известным соотношением
где μo - магнитная проницаемость вакуума;
δ - величина зазора в магнитопроводе якоря;
ϕ- угол, отсчитываемый от оси симметрии обмотки до рассматриваемого элементарного участка длиной
dl= Ro•dϕ;
Ro - средний радиус обмотки.
Полный момент, создаваемый двумя обмотками с угловым размером ϕo и количеством W витков каждая вокруг оси, перпендикулярной их общей оси симметрии, при противоположном направлении тока I в этих обмотках определяется формулой
где КДМ - крутизна моментной характеристики датчика момента, определяемая выражением
Таким образом, магнитоэлектрический датчик момента в известных конструкциях ДНГ имеет линейную характеристику от тока, стабильность которой зависит от точности поддержания температуры и температурного коэффициента индукции установленного на маховике постоянного магнита. К достоинству магнитоэлектрического ДМ можно отнести малое взаимодействие якоря со статором при отсутствии тока в обмотках.
ДНГ с магнитоэлектрическим датчиком момента взят авторами за прототип.
Существенным недостатком гироскопа-прототипа является невысокая тепловая стабильность положения центра масс и, соответственно, низкая стабильность зависящего от перегрузки ухода, обусловленная наличием магнита на вращающемся маховике, имеющем составную конструкцию.
Кроме того, установленный на вращающийся маховик магнит не позволяет оптимальным образом обеспечить широкий диапазон измерений прибора в режиме датчика угловой скорости, поскольку магнит определяет противоречивые с точки зрения измерительного диапазона параметры - момент ДМ и кинетический момент гироскопа.
Целью настоящего изобретения является устранение указанных недостатков прототипа, т. е. повышение точности гироскопа, а именно стабильности, зависящей от ускорения составляющей скорости ухода, и расширение диапазона измеряемых гироскопом узловых скоростей.
Указанная цель в предлагаемой конструкции ДНГ достигается тем, что якорь ДМ выполнен в виде обода (диска) из магнитомягкого материала, установленного на маховик гироскопа, а статор - в виде охватывающего этот обод цилиндрического магнитопровода Ш-образного сечения плоскостью, проходящей через ось цилиндра, на средней части которого расположен постоянный магнит или ряд постоянных магнитов, а на боковых частях, каждая из которых выполнена в виде обращенных к маховику четырех равномерно расположенных по окружности полюсов, уложены обмотки датчика момента, причем торцевые поверхности обода маховика находятся при нулевом (неотклоненном) положении маховика на одинаковом расстоянии от торцевых поверхностей статора. Отсутствие на маховике гироскопа постоянных магнитов позволяет в предлагаемом устройстве повысить стабильность зависящей составляющей скорости ухода по сравнению с прототипом. При этом сохраняется линейность и стабильность характеристики датчика момента. Кроме того, повышение точности гигроскопа в предлагаемом устройстве по сравнению о прототипом можно обеспечить за счет повышения точности термостатирования постоянного магнита, располагая термодатчик в непосредственной близости от него, или путем алгоритмического учета температуры магнита.
В гироскопе-прототипе нет возможности измерить температуру постоянных магнитов, расположенных на вращающемся маховике. Предлагаемое устройство имеет по сравнению с прототипом лучший коэффициент использования датчика момента - меньшую мощность для получения необходимого момента. В гироскопе-прототипе величина указанного коэффициента ограничена тем, что обмотка располагается в зазоре магнитопровода и этот зазор ограничивает число ее витков. В предлагаемом устройстве число витков обмотки с рабочим зазором датчика момента не связано.
Преимущество предлагаемого устройства по сравнению с прототипом проявляется также в такой конструкции ДНГ, в которой для снижения диссипативных сил маховик помещен в ампулу из немагнитного материала. В такой конструкции ДНГ предлагаемое устройство позволяет обеспечить по сравнению с прототипом более глубокий вакуум в ампуле за счет отсутствия клеевых соединений на маховике, получить лучший коэффициент использования датчика момента за счет существенно меньших рабочих зазоров в ДМ и упростить конструкцию ампулы (в гироскопе-прототипе обмотка ДМ должна быть помещена между двумя стенками немагнитной ампулы, расположенными в зазоре якоря).
Для ампулизированной конструкции ДНГ предлагаемое устройство имеет особую ценность - путем его усовершенствования можно совместить в одном элементе функцию датчика момента и датчика угла, что снижает габариты и массу прибора. Для того чтобы предлагаемое устройство выполняло функции датчика угла, предлагается на полюсах статора и на ободе якоря выполнить зубцы, расположенные равномерно по окружности, а на зубцах статора расположить катушки, соединенные между собой по дифференциальной схеме.
В этих катушках благодаря электромагнитной индукции при вращении якоря наводится электродвижущая сила, изменяющаяся пропорционально углу отклонения маховика гироскопа относительно приводного вала.
Предлагаемая конструкция ДНГ с датчиком момента, имеющим линейную моментную характеристику, но не содержащим постоянных магнитов на вращающейся части прибора, в технической литературе отсутствует, поэтому изобретение является новым и обладает по сравнению с прототипом существенным отличием, благодаря которому и выполняется цель изобретения.
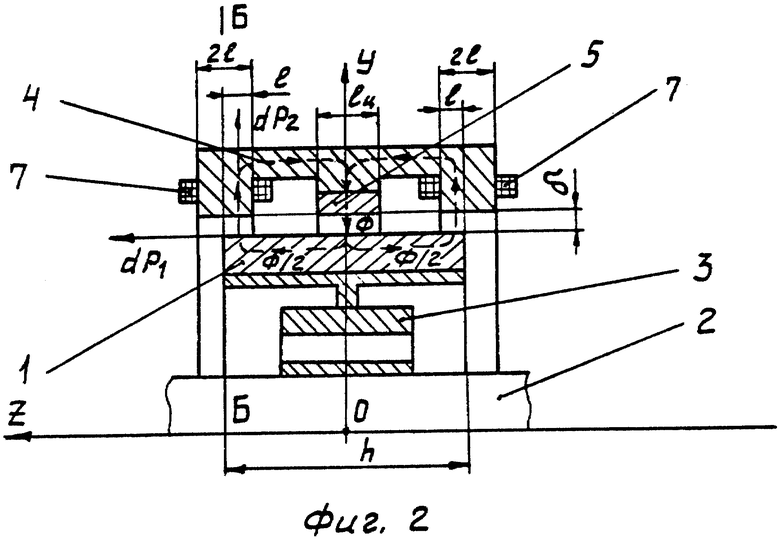
Сущность изобретения поясняется рисунками. На фиг. 1 дан вид предлагаемого устройства со стороны оси Z приводного вала - сечение плоскостью Б-Б (фиг. 2), перпендикулярной оси вала; на фиг. 2 - вид устройства в сечении плоскостью, содержащей ось приводного вала; на фиг. 3 - тот же вид, что на фиг. 1, усовершенствованного устройства, в котором в одном элементе совмещены функции датчика угла и датчика момента. На фигурах применяется сквозная нумерация, где
1 - маховик гироскопа,
2 - приводной вал.
3 - упругий карданов подвес,
4 - статор,
5 - постоянный магнит,
6 - полюсы статора,
7 - обмотки датчика момента,
8 - зубцы статора,
9 - зубцы ротора,
10 - катушка датчика угла.
Цилиндрический маховик 1 с наружным радиусом RM и толщиной h, выполненный из магнитомягкого материала, связан с приводным валом 2 ДНГ посредством упругого подвеса 3, содержащего упругие элементы и одно или несколько кардановых колец.
Центр 0 подвеса, вокруг которого маховик 1 может отклоняться относительно приводного вала, находится на оси Z приводного вала и совпадает с центром симметрии маховика 1. Маховик 1, являющийся якорем датчика момента, находится внутри статора 4 датчика, представляющего собой цилиндрический магнитопровод внутреннего радиуса Rc из магнитомягкого материала Ш-образного сечения плоскостью, проходящей через ось статора, совпадающую с осью приводного вала, на средней части которого расположен постоянный магнит 5 (или набор равномерно расположенных по окружности магнитов), а каждая боковая часть выполнена в виде обращенных к маховику 1 четырех равномерно расположенных по окружности полюсов с угловым размером ϕn каждый, на которых уложены обмотки 7 датчика момента. Статор расположен симметрично относительно плоскости, перпендикулярной оси Z приводного вала, содержащей центр 0 подвеса, и торцевые поверхности полюсов статора находятся на одинаковом расстоянии l от торцевых поверхностей маховика 1 при нулевом (неотклоненном) положении последнего. В показанном на фиг. 3 усовершенствованном варианте предлагаемой конструкции на полюсах статора выполнены расположенные равномерно по окружности зубцы 8 с шириной зубца b, а на якоре - зубцы 9. На некоторых зубцах 8 статора расположены катушки 10 датчика угла. Положение таких зубцов относительно одной из осей симметрии полюсов определяется углом ϕк.
В предлагаемом устройстве воздушный зазор δ= RС-RM между якорем и статором весьма мал по сравнению с размерами магнитопровода, так что поток рассеяния будет незначительным и при определении сил, приложенных к якорю, достаточно ограничиться лишь рассмотрением изменения магнитной энергии, сосредоточенной в воздушных зазорах, оставляя без внимания энергию, сосредоточенную в материале магнитопровода и в поле потока рассеяния [6] .
С учетом этого работу устройства как датчика момента можно описать следующим образом.
Магнит 5, имеющий намагничивающую силу F, создает в центральной части магнитопровода магнитный поток φ (фиг. 2), разделяющийся на два одинаковых потока φ/2 в боковых частях магнитопровода. Величина потока φ определяется формулой:
φ = F/RΣ, (6)
где RΣ - суммарное сопротивление магнитной цепи, равное, с учетом сказанного выше, сопротивлению воздушных зазоров:
где Rц= δ/(μo•Sц) - магнитное сопротивление воздушного зазора в центральной части магнитопровода, площадь которого Sц= 2πRоlц;
Ro= (Rc+Rм)/2 - средний радиус зазора;
Rδ= δ/(μo•Sδ)- магнитное сопротивление зазора боковой части магнитопровода, площадь которого равна четырем площадям зазоров между якорем и полюсом: Sδ= 4ϕп•Ro•l.
Намагничивающая сила Fδ, необходимая для проведения магнитного потока φ/2 через зазор в боковой части магнитопровода, определяется следующим выражением:
Запас магнитной энергии показанного на фиг. 1 элементарного участка воздушного зазора между полюсом и якорем, расположенного относительно оси У симметрии полюса на угле ϕ, определяется формулой
где dGδ- магнитная проводимость этого элементарного участка, определяемая выражением
Приложенная к якорю сила dP1, действующая на этом участке в направлении оси вала, определяется выражением
Приложенная к якорю сила dP2, действующая на этом участке в направлении, перпендикулярном оси вала, определяется выражением
Относительно оси чувствительности гироскопа, содержащей центр 0 подвеса, параллельной оси Х симметрии полюсов, действует элементарный момент dM, обусловленный силами dP1 и dP2:
Момент, приложенный к якорю относительно указанной оси чувствительности, обусловленный изменением магнитной энергии воздушного зазора под одним полюсом, определяется выражением:
Поскольку все полюсы расположены симметрично относительно оси чувствительности гироскопа, моменты, приложенные к ротору, взаимно компенсируются, т. е. полный момент равен нулю.
Четыре обмотки 7 датчика момента, работающие на одной из осей его чувствительности, включены последовательно, но так, что две диагонально расположенные относительно этой оси обмотки создают магнитный поток в полюсах в одном направлении, а две другие диагонально расположенные обмотки - в другом направлении. При подаче тока I во все четыре обмотки с количеством W витков каждая намагничивающая сила Fδ в воздушных зазорах двух диагонально расположенных полюсов увеличивается на величину IW, а двух других диагоналъно расположенных полюсов уменьшается на величину IW, так что к маховику гироскопа с учетом выражения (14), будет приложен момент:
где КДМ - крутизна моментной характеристики датчика момента, определяемая выражением
Таким образом, датчик момента предлагаемого устройства обладает такой же линейной зависимостью от тока, как магнитоэлектрический датчик (см. формулы (4), (5)), имея по сравнению с последним отмеченные выше существенные преимущества (отсутствие постоянного магнита на маховике гироскопа, возможность измерения температуры постоянного магнита, лучший коэффициент использования).
Работа предлагаемого устройства в качестве датчика угла происходит следующим образом. При вращении якоря, имеющего зубцы 9 (фиг. 3), вследствии электромагнитной индукции [7] в катушке 10, расположенной на зубце 8 статора, наводится электродвижущая сила (ЭДС), величина которой в соответствии с законом Фарадея определяется изменением магнитного потока φδ = φ/2 (фиг. 2), создаваемого постоянным магнитом 5 в воздушном зазоре боковой части магнитопровода:
Формулу (17) можно записать в виде:
e=  f•Zя•BмWK•SK (18)
f•Zя•BмWK•SK (18)
где f - частота вращения якоря;
Zя - число зубцов якоря;
Wк - число витков катушки 10;
Sк - площадь пересечения зубца 8, на котором расположена катушка 10, переменным магнитным потоком, модулируемым якорем, равная при нулевом (не отклоненном) положении якоря произведению ширины b зубца (фиг. 3) на половину l его длины, т. к. ротор перекрывает половину боковой части магнитопровода (фиг. 2);
Bм - амплитуда переменной составляющей магнитной индукции в воздушном зазоре боковой части магнитопровода, определяемая выражением:
где Км - коэффициент модуляции, определяемый размером зубца и паза якоря. При отклонении якоря на угол α относительно оси Х (фиг. 3) площадь Sк изменяется на величину:
ΔSк= b•Ro•Sinϕк•α. (19)
Соответственно, ЭДС, наводимая в катушке, изменяется на величину
Все катушки 10 предлагаемого устройства, используемые в одном из двух измерительных каналов ДНГ, соединены последовательно по дифференциальной схеме так, что, если смотреть на гироскоп со стороны измерительной оси, как показано на фиг. 2, то катушки, расположенные в каждом из четырех квадрантов, соединены согласно, а расположенные в соседних квадрантах соединены встречно. При такой схеме соединения в случае отсутствия углового отклонения ротора сумма ЭДС, наводимых в катушках, равна нулю. Эта сумма также не меняется при линейных перемещениях якоря относительно статора. При угловом отклонении ротора складываются все изменения ЭДС Δl, вызванные этим отклонением. С учетом выражения (20) выходное напряжение UДУ датчика угла определяется формулой (21)
(21)
где N - количество катушек 10, используемых в одном измерительном канале,
КДУ - крутизна датчика угла, определяемая выражением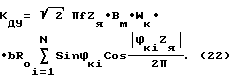
Предлагаемое устройство реализовано на предприятии в динамически настраиваемом гироскопе-приборе КЕАФ05-021, предназначенном для использования в качестве чувствительного элемента гироскопического измерителя угловых скоростей с диапазоном до 10o/с.
Гироскоп имеет ампулизированную конструкцию маховика.
Устройство обеспечивает при определяющих его размерах (см. фиг. 1, 2) 2R0= 35 мм, δ= 0,7 мм, h= 10 мм, 2l= 2,5 мм, lн= 2 мм, ϕп= 70o, напряженности поля в зазоре, создающем постоянным магнитом в центральной части статора, Hδ= 440000 А/м, частоте вращения маховика гироскопа f= 275 Гц, кинетическом моменте маховика H= 130 Г•см•с и коэффициенте использования ДМ Kи= 20 г•см/ ,
,
- крутизну моментной характеристики Kдм≥0,26 г•см/мА,
- крутизну информационной характеристики Kду≥0,1 мВ/угл. с.
При измерении максимальной угловой скорости 10o/c пo одному измерительному каналу гироскопа устройство потребляет 1,25 Вт. Расчеты показывают, что при указанном кинетическом моменте гироскопа с ампулизированной конструкцией маховика добиться такой малой величины потребляемой мощности, используя магнитоэлектрический датчик момента с постоянным магнитом на роторе, невозможно.
ЛИТЕРАТУРА
1. Брозгуль Л. И. , Смирнов Е. Л. Вибрационные гироскопы. М. , "Машиностроение", 1970.
2. Новиков Л. З. , Шаталов М. Ю. Механика динамически настраиваемых гироскопов. М. , "Наука", 1985 г.
3. Физический энциклопедический словарь под ред. А. М. Прохорова, М. , "Советская энциклопедия", 1984.
4. Патент США 3354726.
5. Патент США 3438270.
6. Гордон А. В. , Сливинская А. Г. Электромагниты постоянного тока. М. , "Госэнергоиздат", 1960.
7. Бессонов Л. А. Теоретические основы электротехники. М. , "Высшая школа", 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНАЯ СИСТЕМА ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 2012 |
|
RU2505784C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2018 |
|
RU2687169C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДАТЧИК УГЛА ВРАЩАЮЩЕГОСЯ РОТОРА ГИРОСКОПА | 1979 |
|
RU2107261C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2004 |
|
RU2248524C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ С ТРЕХКРАТНОЙ МОДУЛЯЦИЕЙ ПОЛЕЗНОГО СИГНАЛА НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА С ИНДУКЦИОННЫМ ИЗМЕРИТЕЛЕМ МОДУЛЯЦИИ | 2008 |
|
RU2389031C1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ АБСОЛЮТНОЙ УГЛОВОЙ СКОРОСТИ | 2016 |
|
RU2621642C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 1988 |
|
RU2065575C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2004 |
|
RU2276773C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2017 |
|
RU2653155C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2002 |
|
RU2235976C2 |
Изобретение относится к области приборостроения. В гироскопе с упругим подвесом маховика-носителя кинетического момента применен датчик момента, у которого кольцевой магнит расположен на статоре, выполненном в виде охватывающего маховик и являющегося якорем датчика момента ферромагнитного цилиндра Ш- образного сечения плоскостью, проходящей через ось цилиндра. На средней части цилиндра расположен кольцевой постоянный магнит, а на боковых частях, каждая из которых выполнена в виде обращенных к якорю четырех равномерно расположенных по окружности полюсов, уложены обмотки датчика момента. Торцевые поверхности маховика находятся при нулевом (неотклоненном) положении маховика на одинаковом расстоянии от торцевых поверхностей статора. Для уменьшения габаритов и массы прибора путем совмещения в одном элементе функций датчиков угла и момента предложено на полюсах статора и на ободе маховика выполнить зубцы, расположенные равномерно по окружности, а на зубцах статора расположить обмотки датчика угла, соединенные по дифференциальной схеме. Обеспечивается повышение точности и расширение диапазона измеряемых угловых скоростей при сохранении линейной зависимости момента от тока в обмотках. 1 з. п. ф-лы, 3 ил.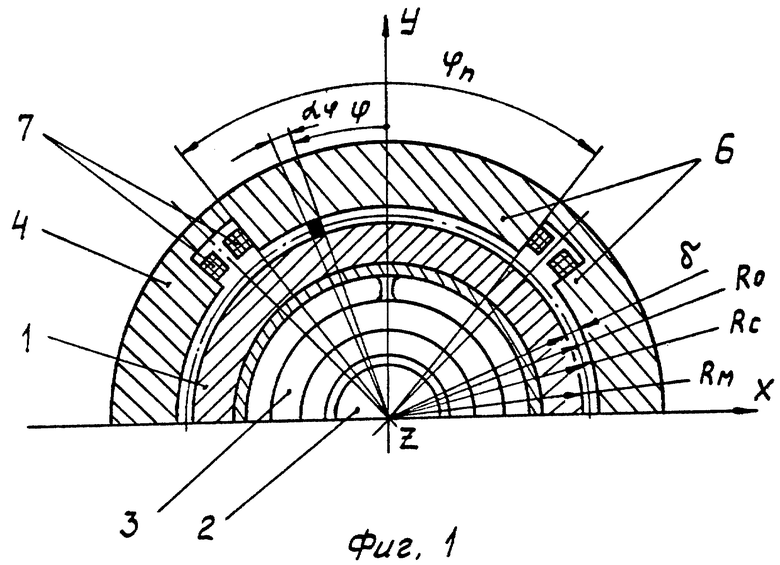
| US 3438270 15.04.1969 | |||
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1990 |
|
RU2027146C1 |
| US 4461994, 24.07.1984. | |||

