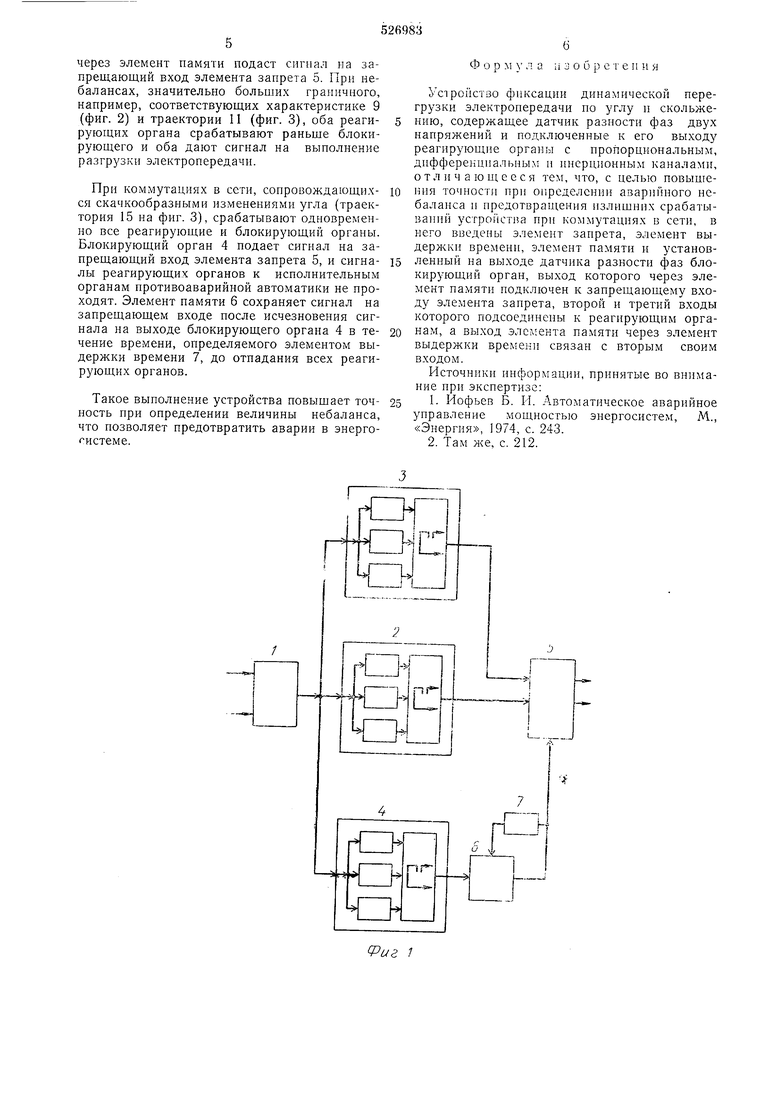
кирующш орган 4 подключен к запрещающс ку входу эле.меита запрета 5 через элемент памяти G е элементом вь держки времени 7. Реагирующий и блокирующий органы имеют уравнение ерабатывания
I д1 S.I I AS ,5
+ Д о К Ос.у,
dt
db
гдескорость изменения угла, скольжеTt
ние;
б - величина угла в исходном режиме; б - текущее значение угла; k, k - коэффициенты; бс.у -сумма параметров, при которой срабатывает реагирующий орган.
срабатывает реагирующий орган.
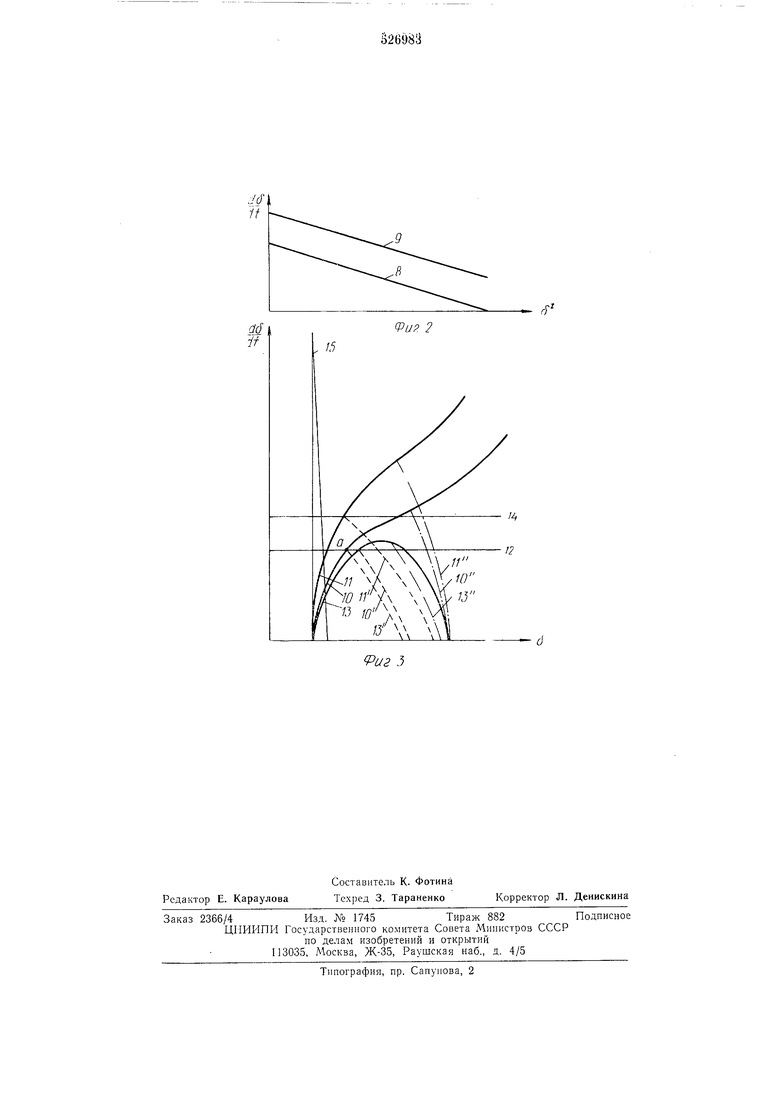
На фиг. 2 показаны зависимости максимальной скорости изменения угла электронередачи при возникновении балансов мощности, граничных по условиям динамической устойчивости 8, и небалансах, больше граничных 9. Небалансы, соответствующие зависимости 9, выбраны таким образом, чтобы эта зависимость была линейной. Характеристики срабатывания 10, II реагирующих органов на фиг. 3 выбираются таким образом, чтобы с учетом погрешностей и необходимого для надежности запаса первый реагирующий орган срабатывал нри граничных небалансах, а второй - при небалансах, соответствующих характеристике 9.
Таким образом, при фиксированном значении угла б срабатыванию каждого реагирующего органа ставится в соответствие вполне определенная величина небаланса. Увеличение коэффициента реагируюищх органов позволяет повысить точность определения небаланса.
Необходимость блокирующего органа удобно пояснить, рассматривая работу устройства в фазовой плоскости (фиг. 3). Появление аварийного дефицита мощности в приемной части энергообъединения несколько больще граничного по условию динамической устойчивости вызывает переходный процесс, отражаемый траекторией 10 на фиг. 3. Траектория пересекает характеристику срабатывания 12 реагирующего органа 2 в точке а. Реагирующий орган срабатывает, давая сигнал на выполнение разгрузки передачи путем отключения генераторов в передающей части, отключения нагрузки в приемной части энергообъединения или того и другого вместе. Траектории после разгрузки - 13 и 10. При появлении дефицита, соответствующего точке б на характеристике 9 на фиг. 2, переходный процесс отражается траекторией И (здесь не рассматривается искривление траектории из-за разгрузки, выполненной от первой ступени). Траектория пересекает характеристику срабатывания 14 реагирующего органа 2. После выполнения разгрузки переходный процесс отражается ветвью 1 Г.
При вьпюлиенпн разгрузки электропередач все траектории становятся устойчивыми. Если разгрузка производится без запаздывания, т.е. в момент срабатывания пусковых органов, то движение происходит по ветвям, показанным пунктиром - 13, 10 и 1Г. В этом случае траектории при небалансах, при которых достаточна разгрузка первой ступени, не нересекают характеристик срабатывания второй. Однако в реальных системах исполнительных органов иротивоаварийно автоматики имеется запаздывание, а траектории с учетом разгрузки могут иметь вид, обозначеипьп 13, 10 и 11 на фиг. 3.
В этом случае возможны излищние срабатывания следующей ступени устройства. Для предотвращения излищних срабатываний характеристика блокирующего органа 4 располагается таким образом, чтобы траектории, на которые настраивается более грубая ступень, сначала пересекали характериетику срабатывания реагирующего органа 3, а затем уже - характеристику срабатывания блокирующего.
При этом все траектории, соответствующие меньщим небалансам, сначала пересекают характеристику срабатывапия блокирующего органа, а затем уже характеристику срабатывания более грубой ступени (реагирующий орган 3). При нереключениях в сети, вызываюН1,их ступенчатое изменение угла, траектория 15 на фиг. 3 пересекает характеристики срабатывания реагирующих органов всех ступеней и блокирующего органа практически одновременио.
Устройство работает следующим образом. При возликнопении аварийного дефицита моишости в приемной энергосистеме или избытка моишости в персдаюисей энергосистеме в исходном режиме, характеризуюн имся величиной угла б--, начииает увеличиваться угол б
и скорость его изменения . Пропорционально углу растет нанряжение на выходе датчика разности фаз 1. Когда сумма нараdo,,,
метров , о и о- превысит значение Оср,
dt
реагирующий орган 2 срабатывает. Блокирующий орган 4 в этом случае либо не еработает вовсе, либо сработает значительно позже, т. е. сигнал от реагирующего органа 2 через элемент занрета 5 нройдет к иснолнительным устройствам противоаварийной автоматики. При
небалансах, несколько больще граничного, нанример, соответствующих траектории 10 (фиг. 3), срабатывают реагирующие органы 2 и 3 и блокирующий орган 4. Реагирующий орган 3 срабатывает позже блокирующего органа 4.
Таким образом, сигнал к иснолнительным устройствам противоаварийной автоматики через элемент запрета 5 пройдет лищь от реагирующего органа 2, а сигнал от реагирующего органа 3 будет заблокирован, поскольку к этому
времени срабатывает блокирующий орган 4 и
через элемент памяти подаст сигнал на запрещающий вход элемента запрета 5. При небалансах, значительно больших граничного, например, соответствующих характеристике 9 (фиг. 2) и траектории 11 (фиг. 3), оба реагирующих органа срабатывают раньше блокирующего и оба дают сигнал на выполнение разгрузки электропередачи.
При коммутациях в сети, сопровождающихся скачкообразными изменениями угла (траектория 15 на фиг. 3), срабатывают одновременно все реагирующие и блокирующий органы. Блокирующий орган 4 подает сигнал на запрещающий вход элемента запрета 5, и сигналы реагирующих органов к исполнительным органам противоаварийной автоматики не проходят. Элемент памяти 6 сохраняет сигнал на запрещающем входе после исчезновения сигнала на выходе блокирующего органа 4 в течение времени, определяемого элементом выдержки времени 7, до отпадания всех реагирующих органов.
Такое выполнение устройства повышает точность при определении величины небаланса, что позволяет предотвратить аварии в энергогистеме.
Л,
Р о р м у л а li 3 о и р е т е п и я
Устройство фиксации динамической перегрузки электропередачи по углу п скольжению, содержащее датчик разности фаз двух напряжений и подключенные к его выходу реагируюн не органы с пропорциональным, дифференциальным и инерционным каналами, о тл II ч а ю HI е е с я тем, что, с целью повышения точности при определении аварийного небаланса и предотвращения излишних срабатываний устройства при коммутациях в сети, в него введены элемент запрета, элемент выдержки времени, элемент памяти и установленный на выходе датчика разности фаз блокирующий орган, выход которого через элемент памяти подключен к запрещающему входу элемента запрета, второй и третий входы которого подсоединены к реагирующим органам, а выход элел:ента памяти через элемент выдержки времени связан с вторым своим входом.
Источники информации, принятые во внимание при экспертизе:
1.Иофьев Б. I-i. Автоматическое аварийное управление мощностью энергосистем, М., «Энергия, 1974, с. 243.
2.Там же, с. 212.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство фиксации динамической перегрузки электропередачи | 1974 |
|
SU525201A1 |
| Устройство фиксации динамической перегрузки электропередачи по углу и скольжению | 1984 |
|
SU1228184A1 |
| Устройство для фиксации перегрузки электропередач при небалансах мощности | 1982 |
|
SU1056355A1 |
| Устройство для разгрузки электропередачи | 1979 |
|
SU855854A1 |
| Устройство для автоматического выявления перегрузки линий электропередачи при аварийных дефицитах мощности | 1975 |
|
SU566290A1 |
| Устройство для автоматического ограничения повышения частоты в энергосистеме | 1981 |
|
SU1029325A1 |
| Устройство для фиксации динамической перегрузки электропередачи | 1976 |
|
SU680106A1 |
| Устройство противоаварийной режимной автоматики электростанции | 1974 |
|
SU748656A1 |
| Устройство для фиксации динамической перегрузки электропередачи | 1973 |
|
SU479196A1 |
| Устройство противоаварийной автоматики | 1981 |
|
SU1020917A1 |