Изобретение относится к области прот1шоаварийной автоматики энергосистем,
В настоящее время известны устройства для фиксации динамической перегрузки электропередач, приводящей к нарушению устойчивости в результате аварийного небаланса активной мощности, например при аварийном дефтщте в приемной энергосистеме. Такие устройства работают по факту увеличения передаваемой акт1шной мощности или взаимного угла 5 с учетом скороти их изменения.
Известно устройство для фиксации динамической перегрузки электропередачи по активной мощности и скорости ее измене}П{я, содержащее датчики мощности, реагирующее и блокирующее реле с дифферешщапьными и пропорциональными входами и инвертирующий усилитель с инерщгонным звеном для улучше1{ия с&лективпости устройства 1. Указшшое устройство характеризуется повьппенной селективностью, благодаря чему оно приходит в действие при динамической перегрузке, приводящей к нарущеншо устойчивости. Однако это устройство не фиксирует величину динамической перегрузки (AT) или величину аварийного дефищша (Рд),что не позволяет или существе1шо затрущшет вьшол11ить селективную дозировк) управляющих воздействий для сохранения устойчивости при динамической перегрузке. Известт также принципы выполнения устройств аналогичного назначения, характеристики которых определяются уравнениями 2
p Kp-R p Pcs,si(J ;Kd-tkWd c4tif
,,.,-к;е К(.,51; Ud-vKP cs, /Усус,
) . где Р - переток активной мощности в исходном режиме;
5 - взаимный угол в исходном режимг; jP, б - текущие значения перетока активной
моащости и взаимного угла; /,5 - первая производная (скорость) текущего значения акт1шной мощности и
B3aiffHHoro угла (8 S);
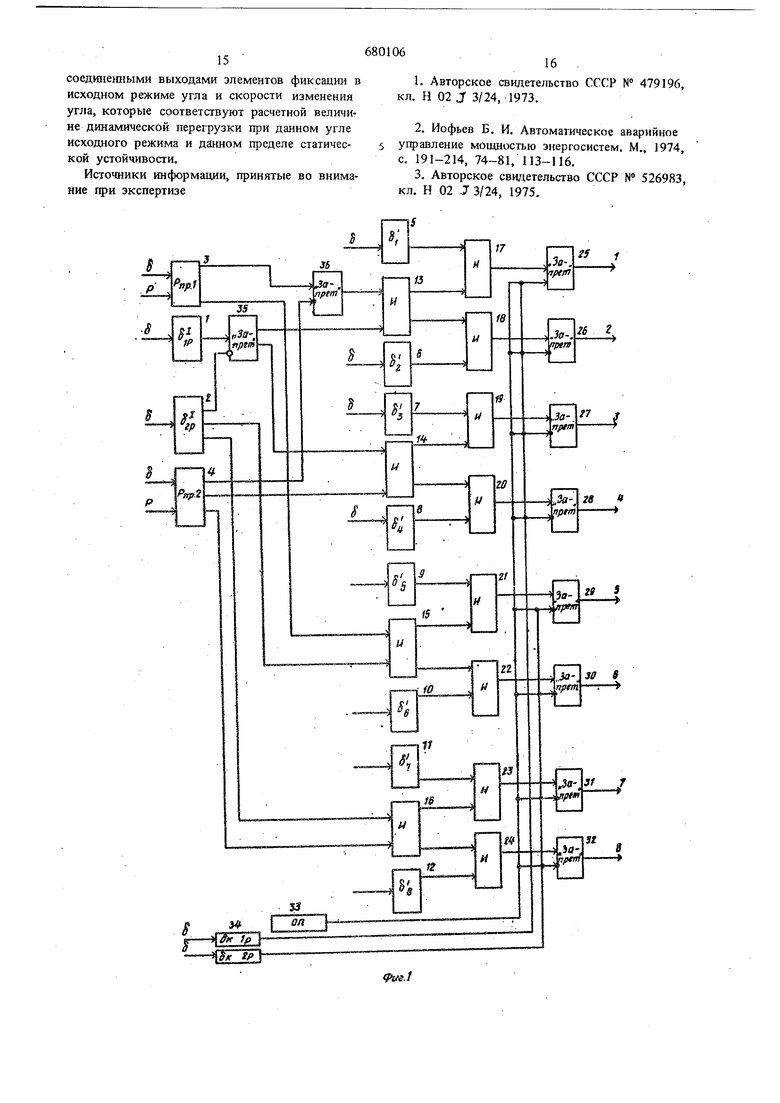
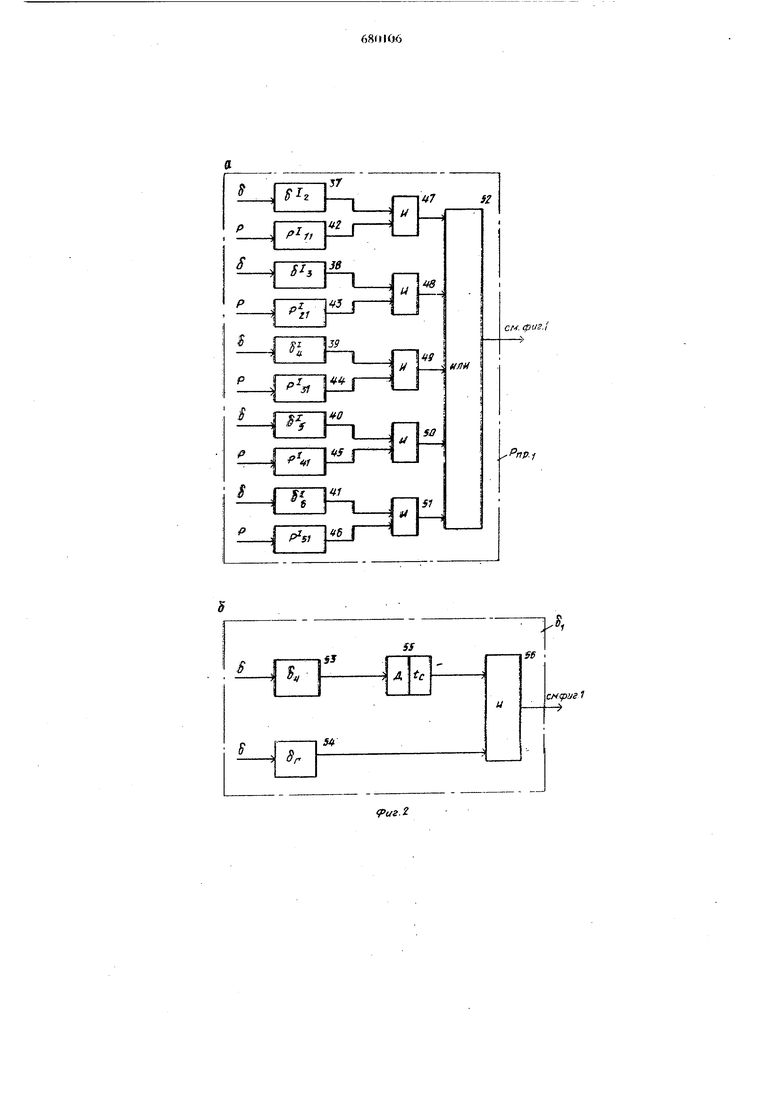
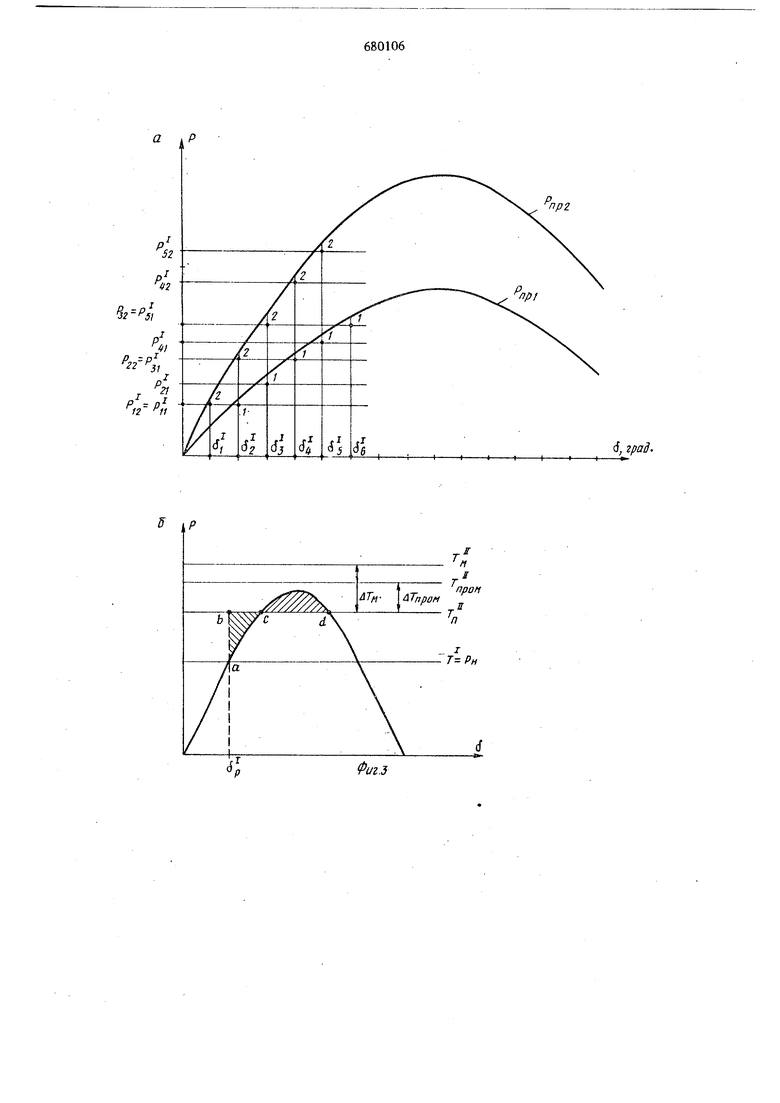
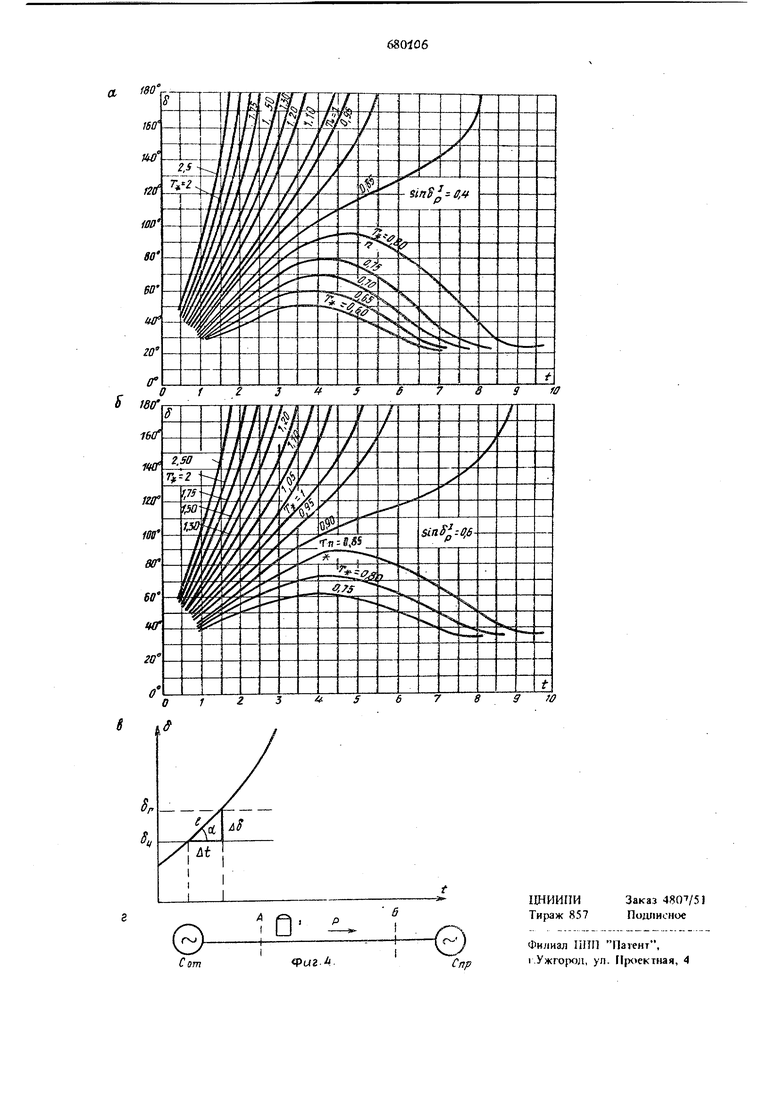
cNS cvC cj y ® срабатывания рассмотренных устройств; , К коэффициенты. Рассмотренные устройства, называемые комбинированными, характеризуются значительной сложностью выпо;шения и сравнительно поздним срабатыванием из-за наклона их характеристик. Позднее срабатывание крайне нежелательно даже на линиях слабой межсистемной связи, так как приводит к необходимости дополнительного преувеличения управляющего компенсирующего воздействия для сохранения устойчивости. Указанные устройства предназначены в основном для фиксации выхода переходного электромеханического процесса за пределы соответствующей граничной фазовой траектории, характеризующей нарушение устойчивости в результате динамической перегрузки, т, е. эти устройства могут служить в основном лишь для фиксации факта опасной для нарущения устойчивости перефузки. При помощи указанных устройств затруднительно выполнять удовлетворительную дозировку управляющих компенсирующих воздействий. Позтому абсолютное значение управляющего воздействия, например, при возможном аварийном дефиците в приемной системе выбирается хотя и не максимально возможным, но неселективным и потому достаточно большим, заведомо превыща ющим те значения, которые возмохшы в подавляющем числе случаев аварийного дефицита. Не селективность управляющ 1х воздействий указан ных устройств при динамической перегрузке усугубляется еще и тем, что для правильной дозировки управляющих воздействий необходима информация о гфеделе статической устойч вости исходной схемы сети. Эта информация в известных устройствах обеспечивается элементо фиксации номера схемы. Из-за сложности зтого элемента указа}шая информация не может бьггь достаточно точной. Неточность информации и cnoKiiocTb элемента фиксации номера схемы сети объясняется ,тем, что этот элемент должен при помощи специальных телемеханических каналов доаварийной ьшформащш фиксировать в исходной схеме сети отключенное положение разл1гшых элементов энергосистемы в виде отдельных линий и генераторов, а также измерять мощность отдельных генераторов или элеет ростанций, часто значительно удаленных от самого устройства (дискретный контроль пропус ной способности сети по составу включенных элементов), из-за сложности указанного элемен та и невысокой точности полученной от него информации известные устройства для фикса: ции динамической перегрузки выполняются без элемента (блока) фиксации предела статическо устойчивости, что снижает из эффективность и усугубляет возможность форми рования неселективных управляющих воздействий. Наиболее близким к изобретению по технической сущности является устройство для фиксации динамической перегрузки элeктpoпq eдачи, содержащее элемент фиксации угла исходного режима, элемент фиксации скорости изменения угла, блокирующий элемент фиксации коммутаций в сети, блокирующий элемент фиксации отключения линий, причем выход элемента фиксации угла исходного режима и элемента фиксации скорости изменения угла соединены последовательно и по схеме Запрет с блокирующими элементами фиксации коммутаций в сети и фиксации отключения линий (3J. Однако использование суммы аналоговых велотин 5 + KS в указанном устройстве ограничивается чувствительностью канала измерения взаимного скольжения S при помощи новой аппаратуры комплекса измерения разности фаз напряжений по концам злекгропфедачи и скорости ее изменения. При помощи этой новой аппаратуры можно фиксировать скольжение не ниже 0,1 Гц, т.е. на достаточно мощных связях с пропускной способностью около 20% от мощности, меньщей из соединяемых систем. Следовательно, на очень широко распространенных линиях слабой связи с пропускной способностью 5-10% от мощности, меньшей из систем, исключается возможность использования суммы аналоговых величин на новой аппаратуре. Использование суммы аналоговьрс величин 5 + KS в известном устройстве означает, что, начиная с некоторой величины аварийного во мущения, траектории, при которых должна срабатывать только первая ступень, пересекут характеристику срабатывания второй ступени и более высоких ступеней (если они предусматриваются) и приведут к неселективному срабатыванию второй и более высоких ступеней. Для исключения такого неселективного срабатьшания в устройстве используются достаточно сложные блокировки, настройка которых усложняет расчет и выбор параметров устройства, а также затрудняет его использование. Чем больще ступеней, тем сложнее блокировки и тем сложнее настроить устройство. Исключение такой блокировки можно добиться за счет загрубления второй и более высоких ступеней, что снижает эффективность известного устройства. Поэтому рекомендуется использовать известное устройство только с одной ступенью, что приводит к необходимости выполнения управляющего воздействия несепективньил и поэтому достаточно больишм, заведомо превышающим те значения, которые воэмох ны в подавляющем числе случаев аварийного дефицита. Целью изобретения является обеспечение фиксации велич1П1ы динамической перефузки (AT) электропередащ или величины аварийного дефицита (Р ) при аварийном небалансе мощности, в частности при аварийном дефвдите в приемной системе, и выполнение с учетом зафиксированной величины динамической перегрузки селективного управляющего воздействия Это достигается тем, что предлагаемое устройст во, содержащее элемент фиксации угла исходного режима (fijp ), элемент фиксации скорости изменения угла (б ,), блокирующий элемент фиксации коммутаций в сети (fi), блокирующий элемент непосредственной или косвенной фиксации отключения линий (OJ1), причем выходы элемента фиксации угла исходного режима (р) и элемента фиксации скорости изменения угла (б) соединены последовательно и по схеме элемента Запрет с блок фующими элементами фиксации коммутаций в сети (8 и фиксации отключения линий (ОЛ), снабжевю блоком фиксации предела статической устойчивости схемы сети (Pnpi), выход которого вклю чен последовательно с выходами элемента фикса ции угла исходного режима (б .L) и элемента фиксации скорости изменения угла (бТ). Для фиксации предела статической устойчивое ти схемы сети при помощи блока фиксации пре дела статической устойчивости ) зтот блок снабжен элементами фиксации активной мощнос ти исходного режима (Р ) и дополш.тельными элементами фиксации угла исходного режима (5), причем последовательно соединены выходы тех двух элементов фиксации активной мощности исходного режима (/) и фиксации угла исходного режима (б), уставки фиксации которых соответствуют определенному пределу статической устойчивости Pпp данной схеме сети Для моделирования при расчетной величине динамической перегрузки (ДТ) начальной части зависимости угла от времени б f(t) в виде отрезка прямой с наклоном при помощи элемента фиксации скорости изменения угла б этот элемент снабжен чувствительным (б ) и грубым (бр) органами фиксации текущего угла в начале и конце отрезка и органом фиксации наклона отрезка по времени At(tc), причем выход чувствительного органа фиксации текущего угла (бц ) подключен к входу органа времени (tc), инвертированный выход которого включен последовательно с выходом грубого органа фиксации текущего угла (бр). Для повышения точности определения величины ди 1амической перефузки (ДГ) или величины аварийного дефицита (Р,) гфи разных значениях угла исходного режима (бр) и разных значениях предела статической устойчивости в разных схемах сети (Рпр} устройство снабжено дополнительными элементами фиксации угла исходного режима (620), дополнительцыми элементами фиксации скорости изменения угла (5), дополнительными чувствительными (б ) и грубыми (5р) органами фиксации угла и дополнительными блоками фиксации гфедела статической устойчивости {/гфг), причем выход каждого блока фиксации предела статической устойчивости (Рпр) соединен последовательно с теми последовательно соединенными выходами элементов фиксации угла исходного режима (5р) и элементов фиксации скорости изменения угла (б ), уставки фиксации которых соответствуют расчетной величине динамической перегрузки при ДШ1НОМ угле исходного режима (бр ) и данном пределе статической устойчивости (Рщ). На фиг. 1 дана схема описываемого устройства на элементах логики; на фиг. 2 - схемы: & блока фиксация предела статической устойчивости Ppp применительно для /щцна элементах логики и б - элемента фиксации скорости изменения угла 6 на элементах логики; на фиг. 3, а - }ишюстрирующие работу блока фиксации предела статической устойчивости Рщ, характеристики активной мощности Р i(b), в частности f PfipsinS, для двух схем сети с пределами статической устойчивости /пра 1 о-е. и др 0,6 о.е., где о. е. - относительные ед ницы; на фиг. 3, б - иллюстрирующая работу устройства характеристика Р f (б) с различ- ными значениями динамической перегрузки Г в исходном нагрузочном режиме Т РН с углом бр ; на фиг. 4, а, б - иллюстрирующие работу устройства типовые зависимости угла от приведенного времени б fCT) при различных относительных динамических перегрузках Г в результате аварийных дефицитов в двух различных исходных режимах с углами исходного режима 6Jp ( 0,4 на фиг. 4, а) и - 37° (sinSjp 0,6 на фиг. 4,6); на фиг. 4, в - иллюстрирующая работу устройства зависимость угла от времени S - f (). ашгооксим1фуемая на начальной своей части в виде отрезка прямой € с наклоном (угол а) при помощи элемента фиксации скорости изменения угла б (см. фиг. 2, а); на фиг. 4, г - ущ ощенная двухмащинная схема сети, на примере которой рассматривается работа устройства, с отправной С и приемной Спр системами. Характер кривых б f(xr) на фиг. 4. а, б зависит от относительного значения динамкческой перегрузки (см. фиг. 3, б) Т -т5 V в исходном нагрузочном режиме 7 Рц с исходным углом при данном пределе статической устойчивости схемы сети /щ,, имеющем связь с исходным нагрузочным режимом Г, например, для двух машинной схемы сети с индуктивным сопротивлением, по выражению (см. фиг. 3, б) f-PH-PnpS-i Pf Реальные зависимости 5 f (t) на фиг. 4, в определяются по известному вьфаженгао (.г, -JW относительный предел (Рпр - О; пр - эквивалентная механическая посто янная инерции, определяемая для двухмашинной схемы сети по выр жению Т- Тjom jnp Чэ Т зот зпр Р|№;(б Т - Т -зпр a-vv пр 1Ал Tj.-собствеш ые механические постоян 1 пр ные инфции отправной и прием-1 НОИ систем; Pep,omt Pgf tijr вращающаяся (номинальная) мощность отправной и 1фиемной систем Принцип работы устройства состоит в следую щем., Каждая из зависимостей 5 f(t) на фиг. 4, в получаемая из зависимостей б f(C) на фиго 4, а, б при помощи выражения (4), соответствует определенному значению динам11ческой перегрузки по выражению (1) в определен ном исходном режиме с углом исходного режима 5р по выражению (2) при определегшом пределе статической устойчивости Рцр например, по выражениям (3) и (2). Поэтому в рассматриваемом устройстве каж дая зависимость б f(t) моделируется, как это принято, путем фиксации угла исходного режима б при помощи элементов бД, фиксации предела статической устой1швости при помощи блока РПР и фиксации начальной части зависимости б f(t) при помощи элемента скорости изменения угла б Необходимость моделирования зависимостей б f(t) в начал ной части вызвана требованием быстродействия устройства на выполнение дозированного управляющего воздействия при динамической перегрузке, так как задержка приводит к уве личению этого воздействия для сохранения устойчивости. Наиболее просто без существенных аппаратурных усложнений отдельных элементов зависимости б f (t) целесообразно моделировать помощи элемента б (см. фиг. 2, б) путем аппроксимации начальной части этих зависимостей отрезком прямой линии С с соответствующим наклоном на плоскости координат 6, t. При этом чувствительным органом б( щ) срабатывании фиксируется текущий угол в начале отрезка, грубым органом б при срабатывании фиксируется текущий угол в конце отрезка, а органом времени t, запускаемым от чувствительного органа б , фиксируется наклон отрезка (угол наклона а на фиг, 4, в) путем фиксации времени At разновременного срабатывания чувствительного органа б ц и грубого органа б г в интервале углов d .(Y) в рассматриваемых условиях сигнал на инвертированном выходе органа t не успевает исчезнуть до срабатывания грубого органа 8ft и угол наклона отрезка прямой в плоскости коорд1шат б, t равен (см. фиг, 4, в) М/о c4rctgr ---oirctgr- . () При срабатывании фубого органа dj. выходной орган элемента подхватывается и сигнал на выходе элемента сохраняется длительно до момента возврата 5р. Зафиксированная рассмотренным образом при помощи элемента 5 соответствующая зависимость б f(t) при зафиксированном при помощи элементов 5р исходном угле 5 и зафиксированном при помощи блока Рпр пределе статической устойчивости -исходной схемы сети дает необходимую информацию о величине Д1шала{ческой перегрузки, обусловившей указанную зависимость б f (t) при 5 и РпрПоэтому величина динамической перегрузки ДГ, фиксируемая предлагаемым устройством, например при помощи двух элеме1 тов 5 и Sg при одном фиксируемом значении PW)-( определяется по выражению (см. фиг. 3, Л.Т-Т- npowN rpONv n . -V. где Тц - предельное значение динамической перегрузки по выражению (1), определяемое равенством площадок ускорения авс и торможения cd, при котором еще сохраняется устойчивость (см. фиг. 3, и Tfi на фиг. 4, а, б) и которое фиксируется первым чувствительным элементом 6i с наибольшим Atn; Tfji - наибольшее (максимальное) значение динамической перегрузки по выражению (1), соответствующее наибольшему (максимальному) аварийному дефициту, при котором нарушается устойчивость; промежуточное динамической перегрузки (Т Щ)ОМ ii) которое фиксируется вторым менее чувствительным элементом бг с меньшим величина динамической перефузки, фиксируемая устройством при срабатывании чувствительного элемента 51 с Atj,, фиксирующего Гд ; ДГм - неибольшая (максимальная) величина динамической перегрузки, фиксируемая устройством в составе соответствующей ступени при срабатывании второго менее чувствительного элемента 62 с фиксирующего пром-J При помощи указанных элементов 5, и S, фиксирующих Т к Гфом устройством могут фикс фоваться не только значения ДГпром и ДГр по выражениям (9) и (10), но и значения -Т -Т npONv -ПрОМ, А-Г ,.1 .л (Л где ДГд.лА вызваны дч дшамнческсж юегрузкой ГйЬпм и Гм и соответс перегрузкой V фом и /м « соответствуют величине аварийного дефицита Рд.«( Р. гфиемной системе с учетом механических постоянных инерции систем по выражению (6). Например, для линий межсистемной слабой связи характерна сравнительно простая зависимость мбж ДУ ДТд и А - Структурная схема предлагаемого устройства на фиг, 1 приведена применительно для двух уставок элементов I и 2 фиксации угла исходного режима 6р с уставками и ,двух уставок блоков 3 и 4 фиксации предела стати ческой устойчивости схемы сети Рщ, с уставками /npf и . даУ уставок элементов фик сации скорости изменения угла 5 для каждого сочетания 6 и пр, т. е. всего для восьми уставок элементов 5-12 5 с уставками 5j -5. Выходы всех элементов 6 и блоков Р-а соединены между собой последовательно по схеме И. В частности, элемент 1 блок 3 P соединены по схеме И при помощи элемента 13 элемент 1 и блок 4 Рпр2 соединены по схе ме И при помощи элемента 14; элемент 2 и блок 3 РПР - по схеме И элемента 15; эле мент 2 и блок 4 - по схеме И элемента 16. Выход элемента И 13 соединен по схеме И выходного элемента 17 с выходом элемента 5 5|, а по схеме И выходного элемента 18 с выходом элемента 6 б . Выход элемента И 14 соединен по схеме И выходного элемента 19 с выходом элемента 7 5з, а по схеме И выходного элемента 20 с выходом элемента 8 64. Выход элемента И 15 по схеме И выходного элемента 21 с выходом элемента 9 5,, а по схеме И выходного элемента 22 с выходом элемента 10 б . Выход элемента И 16 соединен по схеме И выходного элемента 23 с выходом элемента 11 5,, а по схеме И выходного элемента 24 с выходом элемента 12 5. Выходы элементов И 17-24 соединены по схемам элементов Защэет 25-32 с блокируюиш ш элементами 33 и 34 фиксации отключения линии ОЛ и коммутаций в сети 5 кЭлемент 34 фиксащш коммутаций в сети состоит из двух элементов o и 5к2р. каждый из которых блок1фует по схеме Запрет выходаыё элементы И 17-20 и 21-24 в последовательной цепи элементов и Sjp , соответственно. В схеме на фиг. 1 срабатывании элемента фиксации утла исходного режима или блока фиксации предела статической устойчивости Pnpi с большей уставкой, чем элемент Sjp и , соответственно, предуо мотрен вывод элемента б5р или Pjjpf при помощи элементов Запрет 35 и 36. Каждый из блоков фиксации предела статической устойчивости Pjjp.j и (см. фиг. 2,д), моделирующих зависимость Р f(5), состоит из элементов 37-41 фиксации угла исходного режима 5 и элементов 42-46 фиксации активной мощности Р исходного режима, соединенных между собой по схеме элемента И гфименительно для блока . Элементы 37 и 42 этого блока соединены по схеме элемента И 47, элементы 38 и 43 - по схеме элемента И 48, элементы . 39 и 44 - по схеме элемента И 49„ элементы 40 и 45 - по схеме элемента И 50, элементы 41 и 46 - по схеме элемента И 51. Выходы всех элементов И 47-51 соединены по схеме элемента И.ЛИ 52, являющегося выходом блока Лф:1 моделирующего одну зависимость Р f (6) с пределом на фиг. 3, а. Блок Pnpfi моделирует вторую зависимость Р f (б) с гфеделом /npi на фиг. 3, а и выполнен аналогично блоку Рщ,1 . Каждый иэ восьми элементов 5-12 фикса шш скорости изменена угла 5,-. состоит из чувствительного 53 5,, и грубого 54 органов фиксации текущего угла, а также органа 55 времени tg. Выход органа 53 подключен к входу органа 55 времени, инвфтироваиньгй выход которого 1ю схеме И элемента 56 вклю чен последовательно с выходом органа 54. Аналогично выполняется элемент 34 фиксации коммутаций в сети SK (см- фиг. 1). В отличие от элементов j-Sg у каждого иэ элементов 5 и щр существенно меньше выдержка времени At органа tg для фиксации очень быстротечных изменений угла 5 при ком мутациях в сети. Благодаря указанной низкой выдержке времени элемент .34 5 не щ епятствует фиксации устройством динамической нерегруэки, характеризуемой меньшей скоростью изменения угла 5, чем нри коммутациях в сети. Длл элементов 5-8 5{-64 и 34 последовательной цепи элемента 6J иснользуется по одному органу 5 и б , уставки которых принимаются по условию M.p- lpДля элементов 8-12 и 34 )В ПО г1 следовательнои цепи элемента Ь2р также используется по одному органу 5i и 5 р,уставки которых принимаются по условию Г2р Ч2р- 2р (ff) Элемент фиксации угла исходного режима с более высокой уставкой ( ) и {увствительньш орган фиксации текущего угла в посл довательной цепи элемента фиксации угла неходного режима с меньшей уставкой ( ) в полняются на основе одного и того же измери тельного органа фиксации текущего угла, что соответствует выбору уставок по условию М1р 2рПри Bbi6paHfn,ix уставках б L , б ц , б по вьфажениям (14-16) уставки времени Д1 органов tc .в элементах 5-12 6i-б выбираются по выражению (8) в соответствии с фиг.4,в на основании расчетных зависимостей б f(t) при различных дефицитах Л или диналшческих перегрузках .Г- гфи заданных значениях угла исходного режима бр и предела статической устойч1тости Рцр. Уставки времени At органов tc в элементах 34 б,рИ б| 2 рвыбираются по выражению (8) на основании расчетных зависимостей б f (t) при коммутациях в сети. Выходы элементов 5р фиксации угла исход ного режима,а также выходы элементов б , входяш 1е в состав блока фиксации предела статической устойчивости -Рпр, чувствительные 5ц и грубые 6f- органы фиксации текущего угла - все эти пфечисленные элементы и органы выполняются на основе одинаковых органов фиксации текущего угла б (с несколькими выходами),, уставки которых принимаютс с учетом вышеизложенных соображений. Обще количество таких изм тельпых органов 6 зависит от принятой вепишны Д5 по выражению (7) и рабочего интервала углов S б. Меньшему значению Дб соответствует большее число измерительных органов б и более высокая точность фиксации ДГ или . Устройство работает следующим образом. В исходном режиме срабатывают, например, элемент 1 фиксации исходного угла в последовательнои цепи фиксации величины динамической перефузки (см. фиг. 1) и злемент 37 фиксации исходного угла б в составе блока Pjip-t (см, фиг. 1 и 2, а) и на их выходах появляются сигналы. В составе блока пp срабатывает соответствующий элемент 42 фиксации акт1тной мощности исходного режима Рц И на его выходе появляется сигнал, благодаря чему срабатьшают элементы 47 и 52 (см. фиг. 2, а) и тем самым фиксируется предел статической устойчивости схемы сети Pnp-f При возникновении качаний с углами б, превышающими уставки более грубых элементов фиксации исходного угла бр , б (см.фиг.1 и 2, д), и колебаниями электрической мощности, превышающими уставки более фубых элементов фиксации мощности исходного режима Р (см.фиг.2, и), эти более грубые элементы др , 5, Р не фабатывают бла1одаря выдерж- ; ке време1Щ на срабатывание (и возврат). При таких качаниях, отличных от щ едельных, не работают также элементы 5 и 6 (см. фиг. 1) фиксации скорости угла 8 и ба с выходами в последовательной цепи сработавшего в исходном режиме элемента . При этом разновременность срабатывания чувствительного 53 и грубого 54 органов (см. фиг. 4, а) в элементах 5 и 6 6i и бг выще вьщержек времени Дtl и Д12 органов 55 t, (см. фиг. 2, и), настрое1шых на предельное значение Гп по выражению (9) и более высокое значение TjipoM в данном исходном режиме ( ) прк данном пределе ( статической устойчивости схемы сети Pnp-f . При возникновении в рассмотре1шом исходном режиме и схеме сети аварийного дефищ та РЛ в приемной системе, результатом которого явится динамическая перегрузка, характеризуемая, например, предельным значением Г, срабатывает соответствующий элемент 5 (см, фиг. 1) фиксации скорости изменения угла б , настроенный на Гп, в результате взаимодействия его органов бц, б и t (см. фиг. 2, б). В частности, при срабатывании чувствительного органа 53 б ц запускается орган времени 55 tc элемента 5 б1, на этот орган tc не успеет набрать заданное время Дtl и его сигI нал на инвертированном выходе (см. фиг. 2,6) 1 не успеет исчезнуть до срабатывания фубого органа 5, в результате чего при срабатывании грубого органа 54 6 и появлении сигнала на его выходе успевает еработать выходной орган 56 элемента скорости 6 (который подхватывается при срабатывании органа 5f,) и сигналом на своем выходе запускает соответствующий выходной элемент 17 устройства, который фиксирует величину динамической перегрузки ДГпром по вьфажению (9). Таким же образом фиксируется величина динамической перегрузки ДГ по выражению (10) в результате срабатывания элемента 6 8, настроенного на фиксацию Гпром при помощи вьщержки вре мени At2 (At2 Ati). Аналогично работает устройство гфи динамических перегрузках с другими значениялш Г в дру; их исходных режимах и при пределах статической устойчивости схемы сети. При изменении режима, в частности сфи превышении углом исходного режима уставки чувствительного органа 53 5 ij элемента 55,, ор ган 53 срабатывает иэлементы 5 и 6 5 и д с органом 53 В практически вьшодягся из действия в последовательной цепи элемента I фиксации исходного угла 5J5p . Однако при . этом срабатывает элемент 2 фиксации исход1 ого угла sip больщей уставкой, чем бТр который выполнен по выражению (16) на основе того же измерительного органа фиксации текущего угла б, что и фаботаншт чувствительный орган 53 б ц, и устройство снова подготов лено к функционированию Таким образом, предлагаемое устройство, в котором не требуется непосредственное измерение взаимного скольжения, создает важный положительный эффект, заключающийся в возможности фиксации величины динамической перегрузки на электропередачах межсистемной свя зи при аварийном деф1Щите в приемной систем или величины аварийного дефицита и в выполнении благодаря такой фиксации селективного управляющего воздействия для сохранения усто чивости энергосистем. Указанное noBbrnjaei устойчивость, надежность, живучесть энергосистем и создает непосредственный экономический эффект благодаря селективным воздействиям, не приводящим к дополнительному ущербу за счет значительного преувеличения воздействия извест ными устройствами аналогичного назначения, особенно в тех случаях, когда для сохранения устойчивости при дефицитах используется в качестве управляющих воздействий отключение части нагрузки потребителей. Формула изобретения 1. Устройство для фиксации динамической пе регрузки электропередачи, содержащее элемент фиксации угла исходного режима, элемент фиксации скорости изменения угла, блокирующий элемент фиксации коммутации и сети, Олокируюидий элемент фиксации отю ючеш1я линий, причем выходы элемента (jmKcaiijtH угла исходного режима и элемента фиксации .скорости изменения угла соеди1гсн 1я последовательно и по схеме Запрет с блок ф тощими элементами фиксации коммутащш в сети и фнксащи отключе1ШЯ линий, отличающееся тем, что, с целью обеспеченог фиксации величины динамической перефузки электропередачи или величшгы аварийного деф1щкта в приелетой системе и выполнения селективного дозировшшого управляющего воздействия, оно снабжено блоком фикса;;:;) предслк стятиеской устойчивости схемы сети;, выход которого включен поапедопательно с litJXO;: :, фиксации угла исходного ргхачма t элемента ф 1ксации скорости гоменешш угла. 2.Устройство гю п, 1, о т л и ч а ю щ е ес я тем, что, с целью обеспечения фиксации предела статической устойшвости схемы сети гфи помощи блокм фиксации предела статической устойчивости, этот блок снабл ен элементами фиксации активной мощности исходного режима и дополнительны. элементами фиксации угла исходного режима, причем последовательно соедге1ены выходы тех двух элементов фиксации в исходном режЬглс активной г.ющности и угла, которые соответствуют определенному пределу статической устсйчивостк в данкой схеме сети. 3.Устройство по п. , о т л и ч а ю щ ее с я тем. что, с целью модглнрования при расчетаой величине днггамшюской перегрузки начальной части завнс(мости утла от времени в виде отрезка прямой линии с : аклоном при помоиди элемента -фиксации скорости изменения угла, этот элемент снабжегс ч вствительным и грубым орг.яиами фиксации текзтцего угла в начале и конце отрезка и органом времени, причел выход чувств ггельного органа подключен к вход}- органа времет, 1швертироваш1ый выход которого включен последовательно с выходом грубого оргаьа. 4. Устройство по п. 1, о т л и ч а ю щ ее с я тем, что, с целью повыщения точности определешоя Д1шамической перегрузки при разных значениях угла исходного режима и разных значениях предела статической устойчивости в разных схемах сети, оно снабжено дополнительными элементами фиксации угла исходного режима, дополнительными элементами фиксации скорости изменения угла, дополнигельными чувствительными и грубыми оргшшмн фиксации текущего угла и дополнительными блоками фиксации предела статической устойчивости, причем выход каждого блока фиксации предела статической устойчивости соединен последовательно с теми последовательно 15 соединйшыми выходами элементов фиксации в исходном режиме угла и скорости изменения угла, которые соответствуют расчетной величине динамической перегрузки при данном угле исходного режима и данном пределе статичес-s кой устойчивости. Источники информации, принятые во внимание при экспертизе 16 . 1. Авторское свидетельство СССР № 479196, кл. Н 02 J 3/24, 1973. 2. Иофьев Б. И. Автоматическое аварийное управление мощностью энергосистем. М., 1974, с. 191-214, 74-81, 113-116. 3. Авторское свидетельство СССР № 526983, кл. Н 02 J 3/24, 1975.
,
(f; град

s
Фиг.З
