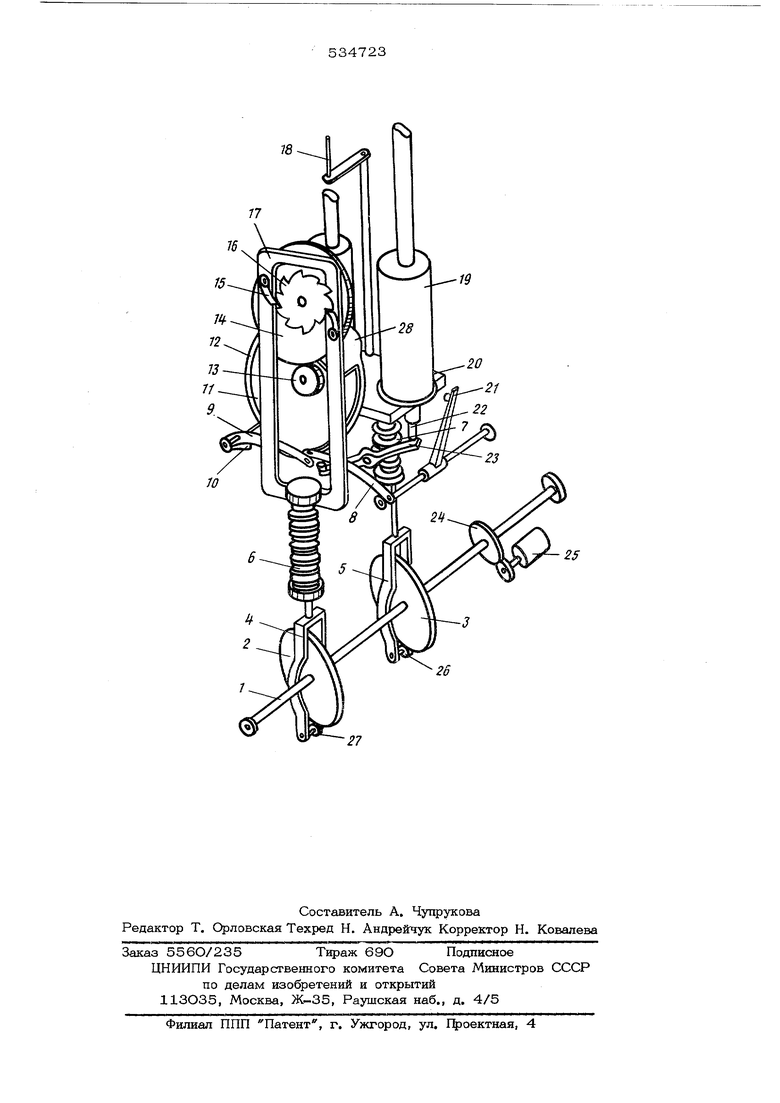
(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ Принципиальными недостатками этого устройства являются следующие: 1.Электродвигатель, находящийся внутри вакуумированного и термостатированного штатива и обеспечивающий арретирование, центрирование и блокирование маятни ков, нарушает температурный режим штатива, а также изменяет в нем остаточное давление воздуха, что ограничивает возмо ность повышения точности измерений. 2.Автоматическая остановка маятнико осуществляется соленоидом, приводящим в движение соответствующий шток, непосредственно касающийся маятников. Солено также находится внутри вакуумированного и термостатированного штатива и также нарушает температурный режим и условия вакуума и, в первую очередь, ограничивает возможность повышения точности измерений и , кроме того, является наименее надежным элементом устройства, нередко выходящим из строя. 3.Кинематическая схема очень сложна наличие .большого количества шестеренчатых передач увеличивает люфты, что приво дит к неточной посадке маятников на опор ные площадки и недостаточно плавному передвижению их; применение реверсивного электродвигателя и муфты свободного хода требует сложной юстировки. Указанные недостатки влияют на точность маятниковых измерений. Целью изобретения является повышение точности устройства для измерения силы тяжести. Указанная цель достигается тем что электродвигатель кинематически связан с двумя кулачками, один из которых посредством сильфона и водила связан со средством для арретирования, блокирования и центрирования маятников. Другой маятник через сильфон, водило, храповик и собачку связан со средством задания маятникам начальных амплитуд и фаз, пус ка и останова маятника. Уменьшение габаритов и веса прибора обеспечивает возможность применения сосуда Дьюара для улучшения теплоизоляции прибора. Коэффициент термостатирования прибора возрос ( К 1ОО). На чертеже показана кинематическая схема предложенного устройства для изме рения силы тяжести. Устройство содержит ось 1 с кулачками 2, 3, водила 4, 5, сильфоны 6, 7, ры чаг 8, 9, пружину 1О, лекала 11, 12, шестерни 13, 14, собачки 15, храповик 16, рамку 17, шток 18, маятник 19, пла форму 2О, лапки 21, кисточку 22, рычаг 23, шестерню 24, электродвигатель 25, шарикоподшипники 26 и 27. Устройство работает следующим образом. Выходная шестерня электродвигателя 25 вращает шестерню 24, закрепленную на оси 1, вместе с которой вращаются два кулачка 2 и 3. Водила 4, 5 посредством шарикоподшипников 26 и 27 прижимаются к кулачкам 2 и 3 силой атмосферного давления, воздействующего на сильфоны 6 и 7. Последние служат для изоляции прибора от атмосферного давления и обеспечивают поступательное перемещение рамки 17 и платформы 2О, находящихся внутри прибора и используемых для управления всеми вакуумированными механизмами. Кроме того, при таком расположении сильфона 7, водила 5 с подшипником 26 и кулачка 3 сильфон 7 служит амортизатором при воздействии вибраций. Арретирование и блокирование маятников 19 вьшолняется путем поступательного перемещения водила 5, передающегося платформе 2О, на которой укреплен вертикальный шток 18. При арретЕфовании маятников блокирующая платформа поднимается, вместе с ней поднимается и шток 18, управляющий арретированием устройства. При дальнейшем подъеме платформа 2О подходит к чечевицам маятников и производит их блокирование, обеспечиваемое атмосферным давлением на сильфон 7. Задание маятникам амплитуд, отклонение нх при посадке на площадки и подъеме, а Также остановка после окончания наблюдений вьшолняется следующим образом. Поступательное перемещение водила 4 по кулачку 2 передается рамке 17, на которой укреплены две собачки 15. При движении рамки одна из собачек (в зависимости от направления движения) будет поворачивать храповик 16 против часовой стрелки. При изменении направления движения рамки храповик будет поворачиваться в ту же сторону, но под действием другой собачки. Таким образом, поступательное перемещение водила 4, задаваемое кулачком 2, преобразуется во вращательное движение храповика 16и жестко скрепленной с ним шестерни 14. При повороте последней праорачивается и малая шестерня 13 и связанные с ней лекала 11, 12. Отклонение маятников на заданнъй угол выполняется лапками 21, скрепленными рычагами 8 и 9. Палец рычага 9 пружкной 10 прижимается к рычагу 8, выступ которого (не показанный на чертеже скользит по лекалу 11. При повороте лекала выступ соскакивает с зуба лекала, задающие лапки отбрасываются и маятники начинают совершать колебания, Перед арретированием маятники останавливаются. При повороте лекала 12 его выступ 28 поднимает конец рычага 23, на который опирается кисточка 22, останавливающая маятник. Аналогично выполняется остановка и другого маятника. Во время блокировки и разблокировки 1маятников лекала 11, 12 не вращаются, так как водило 4 остается в покое. Описанное устройство применено как ос новное в маятниковом приборе Агат, раз работанном в ЦНИГАиК. Успешно проведен йые лабораторные и полевые испытания аппаратуры показали надежную работу всех узлов, точность гравиметрической связи с одним прибором равна - ОД мГал. Устройство позволило на ЗО% ускорить процесс измерений на пункте, автоматизировать и облегчить этот процесс, уменьши число операторов. Устройство может быть применено при разработке новых маятниковых и других приборов, механизмы которых работают в вакуумированных и термостатированных ка мерах. Формула изобретения Устройство для измерения силы тяжести, содержащее маятники, штатив, средств осуществляющие задания маятникам амплитуд и фаз, их пуск, останов, арретирование, центрирование, блокирование, электродвигатель, отличающееся тем, что, с целью повышения точности измерения, электродвигатель кинематически связан с Двумя кулачками, один из которых посредством сильфона и водила связан со средством для арретирования, блокирования и центрирования маятников, а другой - через срильфон, водило, храповик и собачку связан со средством задания маятникам начальных амплитуд и фаз, пуска и останова маятника. Источники информации, принятые во внимание при экспертизе: 1.М. Е. Хейфец и Ю. А. Сливин, Авторское свидетельство № 125 386 от 6.7.1959 г. Опубликовано в Бюллетене изобретений № 1 за I960 г. 2.Хейфец М. Е. Новый маятниковый прибор гравиметрической лаборатории ЦНИГАиК. Труды ЦНИГАиК, вьш. 145, М. , Геодезиздат, 1962 г. 3.Хейфец М. Е., Терехов В. П., Сливин Ю. А., Здобников Е. Т., Иванова А. А., Березин Э. М. Авторское свидетельство № 173 435 от 19,11.1963 г. 4.Хейфец М. Е., Сливин Ю. А. Авторское свидетельство № 197 2ОЗ от 13.4.1965г. (прототип).
7S
77
19
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИО г '• ,-:;i'i;i3 •^••fу.;- •. :--11Сг::л -,V^;-;»' лу-и \ и, 11.)) .... - I -••••^ | 1965 |
|
SU173435A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ CHJSb! ТЯЖЕСТИ НА СУШЕ, НА ДНЕ ВОДНЫХ БАССЕЙНОВ И С ПОДВОДНЫХ ЛОДОК | 1967 |
|
SU197203A1 |
| Устройство для измерения силы тяжести | 1973 |
|
SU526840A1 |
| Устройство для измерения силы тяжести при помощи маятников | 1959 |
|
SU125386A1 |
| БЛОК ИНКЛИНОМЕТРИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ | 2007 |
|
RU2359121C1 |
| Сканирующее устройство дефектоскопа | 1979 |
|
SU974252A1 |
| Устройство для арретирования маятника скважинного длиннопериодного сейсмометра | 1976 |
|
SU568923A1 |
| Инклинометр | 1983 |
|
SU1145124A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УСКОРЕНИЯ СИЛЫ ТЯЖЕСТИ | 2011 |
|
RU2461027C1 |
| Устройство для автоматической дозировки воды, подаваемой в мешалку | 1947 |
|
SU75378A1 |