Предлагаемое изобретение относится к промысловой геофизике и предназначено для контроля за искривлением бурящихся скважин.
Определение направления скважины и ориентации в ней бурильного инструмента является неотъемлемой частью процесса проводки скважины. Для осуществления процесса предназначены системы, обеспечивающие измерение и передачу на поверхность в процессе бурения скважины следующих параметров: азимута и зенитного угла искривления скважины, азимута ориентации бурильного инструмента и т.д. (Молчанов А.А. Измерение геофизических и технологических параметров в процессе бурения скважин. М.: Недра, 1983 г. стр.66-71).
Известен преобразователь инклинометрический для определения азимута, зенитного угла и визирного угла в скважине, содержащий корпус, в котором жестко закреплены три феррозонда, маятниковый датчик зенитного угла и гравитационный датчик визирного угла, выполненный в виде маятника - рамки, вращающейся в корпусе (авт. свид. СССР №1221334, «Преобразователь инклинометрический», опубл. 15.03.1986 г., бюл. №10).
В известном устройстве, с целью повышения точности измерения и надежности работы в процессе бурения, рамка датчика визирного угла снабжена эксцентрично установленным в ней цилиндром с осевым отверстием и расположенными в нем с возможностью вращения металлическими роликами, а в маятниковом датчике зенитного угла выполнены радиальные отверстия, в которых размещены металлические шарики с возможностью свободного перемещения по ответной внутренней поверхности корпуса датчика зенитного угла, при этом датчик зенитного угла укреплен в корпусе, а ось вращения маятника датчика зенитного угла параллельна оси чувствительности второго феррозонда и перпендикулярна при нулевом визирном угле плоскости, проходящей через ось вращения и центр тяжести маятника датчика визирного угла.
При работе инклинометра в процессе работы, при наличии вибрации и ударов, появляются значительные погрешности в измерениях, которые зависят: от моментов трения в осях подвеса измерительных блоков, от неточного совпадения центров тяжести грузов с плоскостями симметрии рамок.
Моменты трения в осях подвеса снижаются использованием поплавковых конструкций, предварительной прокаткой подшипников, применением скользящих токосъемов с малым диаметром коллектора.
Погрешности от неточной установки грузов устраняются специальной регулировкой при сборке прибора.
Таким образом, точность измерений можно повысить путем изменений в конструкции грузодержателей и самих грузов, а также регулировкой при их установке.
Но существуют значительные погрешности, связанные с уходом чувствительных элементов (маятников и измерительных рамок) от положения равновесия.
Эти погрешности устраняются различными приспособлениями, например, повышающими инерционность маятников, или механизмами, ограничивающими их отклонение.
В известном устройстве (авт. свид. №1221334) для снижения погрешностей при измерении использованы устройства, повышающие инерционность чувствительных элементов, например, рамка датчика визирного угла снабжена цилиндром с металлическими роликами, а маятник датчика зенитного угла снабжен металлическими шариками. Указанные приспособления повышают инерционность маятниковых механизмов.
Недостаток конструкции заключается в сложности кинематики, из-за чего затрудняется регулировка при сборке прибора.
Известно устройство для ориентирования датчиков, содержащее заполненный жидкостью корпус с электрическим разъемом, установленные внутри корпуса маломоментный спиральный токоотвод и рамку с эксцентричным грузом, упором и датчиком (авт. свид. СССР №1343006, «Устройство для ориентирования датчиков», опубл. 07.10.1987 г., бюл. №37).
С целью повышения надежности работы указанное устройство снабжено переключающим триггерным механизмом, который имеет фиксатор с упором, шток с арретирующим рычагом, две пружины, установленные на фиксаторе и штоке, два электромагнита, сердечники которых закреплены в фиксаторе и штоке, а обмотки жестко связаны с корпусом, при этом датчик связан с электрическим разъемом маломоментным спиральным токоотводом, арретирующий рычаг имеет шарнирное соединение с корпусом и штоком, а фиксатор установлен с возможностью перемещения вдоль оси корпуса и кинематически связан с арретирующим рычагом и упором рамки.
В этом устройстве для сохранения равновесия вращающихся рамок использованы механизмы, ограничивающие их движения, которыми служат аррретирующие рычаги и фиксатор.
Недостаток конструкции связан с тем, что данный механизм сам нуждается в тщательной регулировке и сложен по конструкции.
Известен инклинометр с компенсирующим устройством (Пат. США №4345454, опубл.: Р.Ж. «Горное и нефтепромысловое машиностроение», №6, 1983 г.).
Указанный инклинометр предназначен для контроля зенитного угла и отклонения по азимуту при наборе кривизны скважины. Прибор устанавливается в бурильной колонне непосредственно над кривым переводником и имеет герметичный корпус, спускаемый на кабеле, внутри которого размещены: блок датчиков кривизны, смонтированный внутри промежуточного корпуса, сигнализатор углового положения блока, датчиков относительно промежуточного корпуса, компенсатор крутильных колебаний бурильной колонны. Промежуточный корпус подвешен на сильфоне, предотвращающем его вращение. Компенсатор выполнен в виде конической зубчатой передачи, одна шестерня которой жестко закреплена на блоке датчиков, а вторая, вдвое большего диаметра, выполнена в виде двух секторов, жестко укрепленных на оси под углом 180 град. Ось смонтирована на подпружиненном основании и связана с ним через храповик. Сектора размещены по разные стороны оси шестерни блока датчиков. Благодаря храповику при крутильных колебаниях блок датчиков может ступенчато поворачиваться сначала в одну сторону, а затем при входе в зацепление второго сектора - в другую сторону на тот же угол. Таким образом, колебания трансформируются в угловые смещения, которые контролируются сигнализатором.
В данном инклинометре храповик выполняет роль приспособления, ограничивающего перемещение блока датчиков при крутильных колебаниях. Но устройство сложно по конструкции. Кроме того, износ храповика и его ступенчатый поворот не обеспечивают плавность поворота, что снижает точность измерения.
Известна конструкция блока инклинометра, состоящая из герметичного корпуса, заполненного кремнеорганической жидкостью. В корпусе расположен кожух измерительного блока, в котором на подшипниках закреплена рамка в виде поплавка с эксцентрично установленным грузом, обеспечивающим установку рамки перпендикулярно к плоскости наклона скважины. На рамке крепится ротор преобразователя угла установки отклонителя.
На этой же рамке расположен преобразователь зенитного угла, где статор жестко связан с рамкой, а ротор поворачивается в подшипниках. На роторе закреплен груз, имеющий эксцентриситет и выполняющий роль чувствительного элемента датчика зенитного угла. Груз также имеет поплавковую конструкцию, ось его вращения перпендикулярна к оси корпуса.
Для измерения азимута использованы магниточувствительные датчики (феррозонды), размещенные на горизонтально стабилизированной платформе. Подвод питания и съем электрических сигналов с преобразователей угловых перемещений осуществляются маломоментными скользящими токоподводами (Молчанов А.А. Измерение геофизических и технологических параметров в процессе бурения скважин. М.: Недра, 1983 г., стр.70-71).
В данной конструкции некоторые погрешности в измерении устраняются известными приемами: моменты трения в осях подвеса снижаются использованием поплавковых конструкций, предварительной прокаткой подшипников, применением скользящих токосъемов с малым диаметром коллектора.
Но остаются погрешности, связанные с уходом чувствительных элементов (маятников и измерительных рамок) от положения равновесия из-за недостаточной инерционности рамок с грузами, обусловленные действием вибрации.
Задачей предлагаемого изобретения является повышение точности измерения за счет обеспечения стабильности положения рамки с грузами путем повышения инерционности подвижной рамки.
Указанная задача решается тем, что в блоке инклинометрических преобразователей, содержащем герметичный корпус, залитый кремнеорганической жидкостью, подвижную рамку с эксцентричным грузом, установленную в корпусе на подшипниках с элементами качения между внутренней и наружной обоймами, преобразователь угла установки отклонителя, блок зенитного угла, блок азимутального угла, а также маломоментный токосъем, подшипник со стороны блока азимутального угла выполнен с диаметром, соразмерным диаметру подвижной рамки с эксцентричным грузом, при этом наружная обойма этого подшипника жестко прикреплена к указанной рамке, а его внутренняя обойма снабжена выемкой для размещения элементов качения и имеет резьбу для подсоединения к ответной резьбе герметичного корпуса.
На фиг.1 представлено устройство в сборе.
На фиг.2 изображен подшипник узла блока инклинометрических преобразователей.
Блок инклинометрических преобразователей содержит: герметичный корпус 1, залитый кремнеорганической жидкостью, подвижную рамку 2 с эксцентричным грузом 3, установленную в корпусе на подшипнике 4 и подшипнике 5 с элементами качения 6 между внутренней обоймой 7 и наружной обоймой 8, преобразователь угла установки отклонителя 9, блок зенитного угла 10, блок азимутального угла 11, а также маломоментный токосъем 12. При этом подшипник 5 со стороны блока азимутального угла выполнен с диаметром, соразмерным диаметру подвижной рамки 2 с эксцентричным грузом 3 (диаметр подшипника может быть равен диаметру подвижной рамки или отличаться от него с небольшим допуском). Наружная обойма 8 указанного подшипника 5 прикреплена к подвижной рамке 2 винтами 13, а внутренняя обойма 7 снабжена выемкой 14 для размещения элементов качения 6 (шариков) и имеет резьбу 15 для подсоединения к ответной резьбе 16 герметичного корпуса 1.
Устройство работает следующим образом.
Блок зенитного угла и блок азимута смонтированы в подвижной рамке с эксцентричным грузом, под действием которого в наклонном участке скважины подвижная рамка в подшипниках поворачивается в положение устойчивого равновесия, фиксируя таким образом вертикальную плоскость, совпадающую с осью скважины. Измерение углов указанными блоками происходит в зависимости от этого положения.
Диаметр внешней обоймы подшипника 5 значительно увеличен и примерно равен диаметру подвижной рамки, что повышает инерционность подвижной рамки за счет увеличения плеча и смещения центра масс, что в условиях вибраций приводит к возникновению возмущающих моментов вокруг оси поворота рамки и обеспечению стабильности ее положения.
Все элементы подшипников выполнены из немагнитных материалов.
Увеличение инерционности измерительной подвижной рамки позволяет повысить точность инклинометрических измерений за счет стабильности положения и устойчивого равновесия измерительной системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения искривления скважины | 1979 |
|
SU866149A1 |
| Гироскопический инклинометр | 1981 |
|
SU1002551A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЗЕНИТНЫХ И АЗИМУТАЛЬНЫХ УГЛОВ СКВАЖИН | 2011 |
|
RU2459951C1 |
| Устройство регистрации угла положения отклонителя и зенитного угла скважины | 1990 |
|
SU1751303A1 |
| Преобразователь зенитного угла | 1982 |
|
SU1027379A1 |
| Устройство для ориентирования датчиков | 1982 |
|
SU1102916A1 |
| Датчик угла наклона объекта | 1990 |
|
SU1747872A1 |
| Гироскопический инклинометр | 1980 |
|
SU901485A1 |
| БЛОК ПЕРВИЧНЫХ ПРЕОБРАЗОВАТЕЛЕЙ СКВАЖИННОГО МАГНИТОМЕТРА-ИНКЛИНОМЕТРА | 1992 |
|
RU2063052C1 |
| Устройство для определения азимута и визирного угла в скважине | 1984 |
|
SU1162959A1 |
Изобретение относится к промысловой геофизике и предназначено для контроля за искривлением бурящихся скважин. Техническим результатом изобретения является повышение точности инклинометрических измерений за счет обеспечения стабильности положения рамки с грузами путем повышения инерционности подвижной рамки, на которой находятся измерительные блоки. Блок инклинометрических преобразователей содержит: герметичный корпус, залитый кремнеорганической жидкостью, подвижную рамку с эксцентричным грузом, установленную в корпусе на подшипнике и подшипнике с элементами качения между внутренней обоймой и наружной обоймой, преобразователь угла установки отклонителя, блок зенитного угла, блок азимутального угла, а также маломоментный токосъем. При этом подшипник со стороны блока азимутального угла выполнен с диаметром, соразмерным диаметру подвижной рамки с эксцентричным грузом (диаметр подшипника может быть равен диаметру подвижной рамки или отличаться от него с небольшим допуском). Наружная обойма указанного подшипника прикреплена к подвижной рамке винтами, а внутренняя обойма снабжена выемкой для размещения элементов качения (шариков) и имеет резьбу для подсоединения к ответной резьбе герметичного корпуса. 2 ил.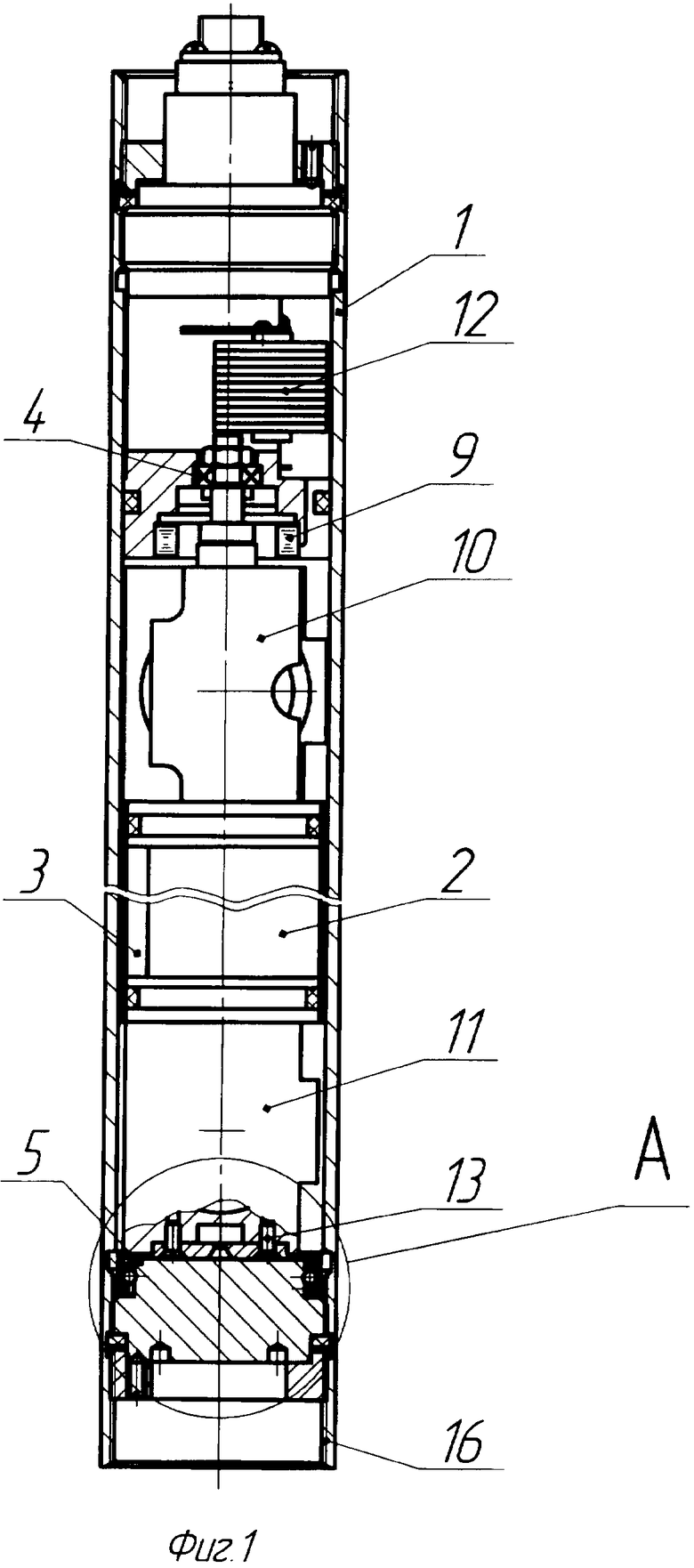
Блок инклинометрических преобразователей, содержащий герметичный корпус, залитый кремнеорганической жидкостью, подвижную рамку с эксцентричным грузом, установленную в корпусе на подшипниках с элементами качения между внутренней и наружной обоймами, преобразователь угла установки отклонителя, блок зенитного угла, блок азимутального угла, а также маломоментный токосъем, отличающийся тем, что подшипник со стороны блока азимутального угла выполнен с диаметром, соразмерным с диаметром подвижной рамки с эксцентричным грузом, при этом наружная обойма этого подшипника жестко прикреплена к указанной рамке, а его внутренняя обойма снабжена выемкой для размещения элементов качения и имеет резьбу для подсоединения к ответной резьбе герметичного корпуса.
| МОЛЧАНОВ А.А | |||
| Измерение геофизических и технологических параметров в процессе бурения скважин | |||
| - М.: Недра, 1983, стр.70-71 | |||
| Устройство контроля искривления скважины | 1986 |
|
SU1328496A1 |
| Виброустойчивый преобразователь зенитного угла | 1986 |
|
SU1430509A1 |
| Устройство для ориентирования датчиков | 1979 |
|
SU781329A1 |
| RU 2055181 C1, 27.02.1996 | |||
| US 4345454 A, 24.08.1982 | |||
| ИСАЧЕНКО В.Х | |||
| Инклинометрия скважин | |||
| - М.: Недра, 1987, стр.72-73. | |||

