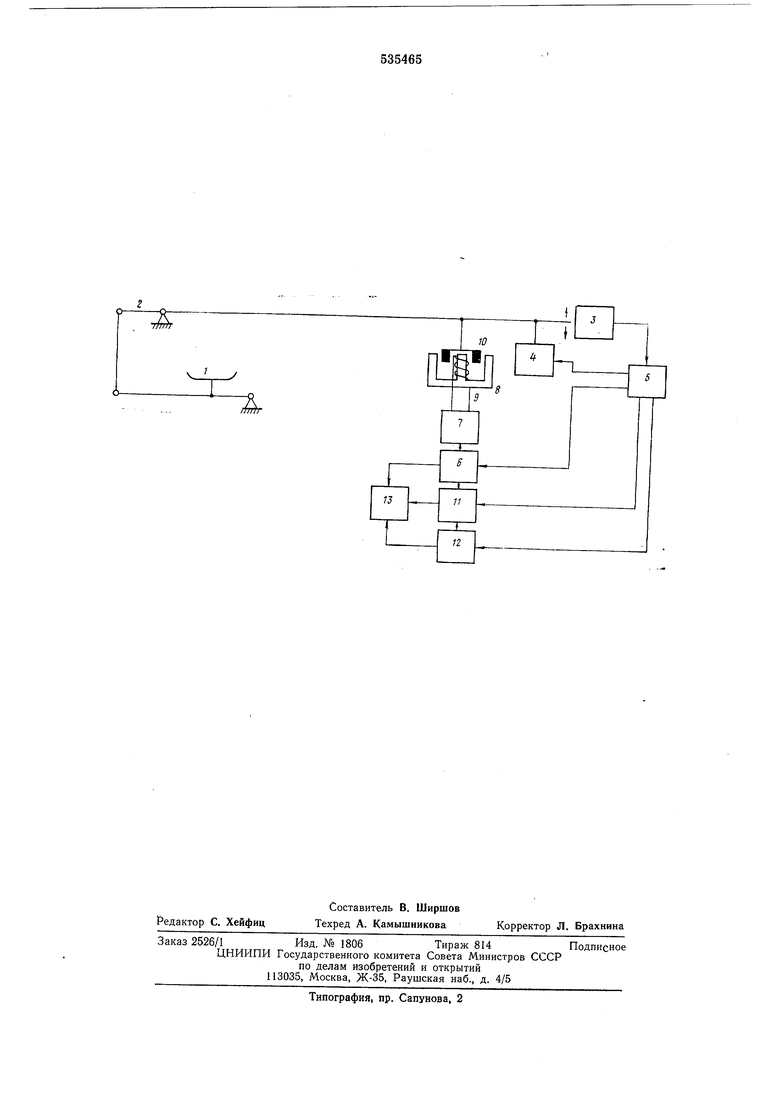
р, / - значения соответственно стенени успокоения и момента инерции при наличнн взвешиваемого продукта. Как видно из формулы увеличение момента инерции рычажной системы, т. е, увеличение массы взвешиваемого продукта, приводит к уменьшению степени успокоения рычажной системы. При этом выполнить необходимое условие во всем диапазоне измерений можно только за счет ухудшения динамических характеристик весоизмерительного устройства, например, выбором большого значения РО или /0. Поддержание значения степени успокоения, например, в пределах 1 -1,1 с помощью управляемого демпфера позволяет перейти к односкоростному быстрому уравновешиванию. Это дает возможность улучшить динамические характеристики прибора и повысить его быстродействие. Устройство работает следующим образом. При отсутствии взвешиваемого продукта на грузоприемной платформе 1 рычажная система 2 выведена из положения равновесия иод действием несбалансированных сил тяжести элементов рычажной системы. Ход рычажной системы ограничен упорами, не показанными на чертеже. Результирующая сила совпадает по направлению с силой тяжести взвешиваемых продуктов, т. е. аналогична наличию на грузоприемной платформе 1 груза с некоторой начальной силой тяжести. Измерение этой начальной силы происходит по команде с блока управления 5, по которой генератор 4 линейно изменяющейся силы с течением времени компенсирует начальную. Введенное в блок 12 задания цены значение цены перемножается в блоке 11 подсчета стоимости с числовым эквивалентом веса продукта. В блоке 13 индикации и регистрации индуцируются и регистрируются значения веса, стоимости и цены продукта. В качестве индикатора перемещения 3 могут быть использованы емкостные, индуктивные и др. преобразователи перемещения. Генератор 4 линейно изменяющейся компенсирующей силы может быть построен на базе генератора пилообразного тока и магнитоэлектрического силового преобразователя. По мере роста показаиия в блоке 6 подсчета веса продукта увеличивается ток в катушке 9 на магнитопроводе демпфера, что приводит к увеличению индукции в кольцевом зазоре, тем самым получается большая демпфирующая сила и стабилизируется значение степени успокоения рычажной системы 2 в пределах 1-1,1, что улучшает динамические характеристики весоизмерительного устройства и позволяет увеличить его быстродействие. Индикатор перемеш,ения 3 отмечает прохождение рычажной системой 2 положения равновесия. Таким образом происходит пре образование измеряемой силы во временной интервал, где началом является момент подачи сигпала с блока управлепия 5, а концом - момент прохождения рычажной системой 2 положения равновесия. В блоке 6 подсчета веса временной интервал преобразуется в цифровую форму. При завершении измерения генератор 4 линейно изменяющейся силы возвращается в исходное состояние. Результат измерения представляет собой вес «тары и хранится в запоминающем узле блока управления 5. При наличии взвешиваемого продукта на грузоприемной платформе в результате измерения получается новое цифровое значение. Разность результатов измерений при наличии взвешиваемого продукта и при его отсутствии дает числовой эквивалент веса продукта, который преобразуется в аналоговую форму (ток или напряжение) цифроаналоговым преобразователем 7. Формула изобретения Весоизмерительное устройство с подсчетом стоимости, содержащее рычажную систему с индикатором перемещения, связанную с подвижным элементом управляемого демпфера с неподвижной регулирующей катушкой, генератор компенсирующей силы, цифроаналоговый преобразователь и блоки управления, подсчета веса и стоимости, задания цень1, индикации и регистрации веса, стоимости и цены взвешиваемого нродукта, отличающееся тем, что, с целью повышения быстродействия, нем неподвижная регулирующая обмотка атушки управляемого демпфера соединена с ыходом цифроаналогового преобразователя, вход которого соединен с выходом блока подсчета веса. Источники информации, принятые во внимаие при экснертизе: 1.Авт. св. № 236795, М. Кл. G 01G 19/40, 1969. 2.Патент США № 3291232, НКИ 177-3, 966. 3.Патент США № 3205957, НКИ 177-3, 965. 4.А. И. Сарахов. «Весы в физико-химических сследованиях, «Наука, М., 1968. 5.Авт. св. № 293180, М. Кл. G 01G 23/36, 968 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Весоизмерительное устройство с подсчетом стоимости | 1979 |
|
SU885818A1 |
| Весоизмерительное устройство с подсчетом стоимости взвешенного продукта | 1975 |
|
SU535466A1 |
| Весовое устройство с вычислением стоимости взвешенного товара | 1975 |
|
SU514208A1 |
| Устройство измерения массы с автоматической коррекцией погрешностей | 1973 |
|
SU512389A1 |
| ЭЛЕКТРОННЫЕ ЦИФРОВЫЕ ВЕСЫ | 1999 |
|
RU2162209C1 |
| СПОСОБ ВЗВЕШИВАНИЯ ГРУЗОВ НА РЫЧАЖНЫХ ВЕСАХ И ВЕСОИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2006 |
|
RU2308678C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАССЫ НЕТТО | 1990 |
|
RU2036440C1 |
| Весоизмерительное устройство | 1976 |
|
SU653516A1 |
| УНИВЕРСАЛЬНЫЕ СЧЕТНЫЕ ВЕСЫ | 1992 |
|
RU2065580C1 |
| Весоизмерительное устройство с вычислением стоимости | 1980 |
|
SU887937A1 |