Изобретение относится к весоизмерительной технике, а именно к автоматическим весам с электромагнитным уравновешиванием, и может быть использовано в производственных условиях, торговле и быту для точного взвешивания грузов.
Известны электронные цифровые весы с автоматическим электромагнитным уравновешиванием (АС СССР N 1642254 A1, БИ N 14, 1991; АС СССР N 742719, БИ N 23, 1980), в которых грузоприемная платформа закрепляется на упругом элементе, а сила, возникающая за счет взвешиваемой массы, уравновешивается с помощью магнитоэлектрического механизма, содержащего катушку с регулируемым током, перемещающуюся под воздействием измеряемого груза в воздушном зазоре магнитной системы, состоящей из постоянного магнита (или системы постоянных магнитов) и магнитопровода. Для управления током в катушке магнитоэлектрического механизма используется фотоэлектронный (АС СССР N 1642254 A1, БИ N 14,1991) или емкостной (АС СССР N 742719, БИ N 23, 1980) датчик состояния равновесия, механически жестко связанный с катушкой магнитоэлектрического механизма, и электронная аналоговая или цифровая система автоматического регулирования компенсирующего тока.
Недостатками рассмотренных аналогов является недостаточная стабильность, определяемая нестабильностью свойств упругих элементов, и наличие подвижной катушки, что затрудняет токоподвод (так как он должен быть безмоментным), а также нетехнологичность изготовления магнитоэлектрического компенсационного устройства, требующего получения точного значения магнитной индукции в воздушном зазоре магнитной системы, и в котором перемещается катушка, причем для получения достаточной компенсирующей силы масса постоянных магнитов магнитной системы должна быть большой, а датчик состояния равновесия (емкостной или фотоэлектронный) требует высокой точности изготовления его элементов.
Наиболее близким по технической сущности к предлагаемому изобретению являются весы с электромагнитным уравновешиванием (АС СССР N 1345061 A1, БИ N 38, 1987), содержащие коромысло, одно плечо которого соединено с грузоприемной платформой, а другое - с подвижными элементами компенсационного магнитоэлектрического механизма и датчика перемещения, подключенного ко входу электронной системы автоматического регулирования, причем измеряемая масса определяется по величине компенсирующего тока, необходимого для уравновешивания силы тяжести взвешиваемого груза.
В этих весах устраняются недостатки, связанные с наличием упругих элементов, на которых подвешивается грузоприемная платформа, и недостаток, связанный с неудобством токоподвода к подвижной катушке.
Основными недостатками прототипа является то, что в этих весах для облегчения токоподвода к катушке она сделана неподвижной, а подвижным является постоянный магнит, что существенно ограничивает величину компенсирующей силы, а следовательно, и максимальное значение массы взвешиваемого груза.
Основной технической задачей, на решение которой направлено предлагаемое изобретение, является упрощение конструкции компенсационного устройства, направленное на повышение технологичности их производства при сохранении высокой точности и основных сервисных функций.
Решение указанной задачи достигается использованием в качестве компенсационного устройства электромагнита с неподвижной катушкой, и тот же электромагнит используется в качестве индикатора равновесия, причем катушка электромагнита через усилитель компенсационного тока непосредственно связана с выходом цифроаналогового преобразователя и через разделительный конденсатор связана с выходом высокочастотного генератора и входом узкополосного усилителя, выход которого через детектор связан с одним из входов дифференциального усилителя, второй вход которого соединен с выходом источника опорного напряжения, а выход дифференциального усилителя через аналого-цифровой преобразователь связан с информационным входом микроЭВМ, выходы которой подключены к цифроаналоговому преобразователю и цифровому индикатору.
Сущность изобретения поясняется структурной схемой на чертеже.
Электронные цифровые весы состоят из коромысла 1, к короткому плечу которого подвешена грузоприемная платформа 2, на которую подается взвешиваемый груз 3, а к длинному плечу на тяге 4 подвешен якорь 5 электромагнита, состоящего из магнитопровода 6 броневого типа и катушки 7, питаемой ступенчато регулируемым током от системы автоматического регулирования компенсирующего тока 8, содержащей: усилитель компенсационного тока 9 с высоким выходным сопротивлением, цифроаналоговый преобразователь 10, генератор 11 высокочастотного тока, также обладающий высоким выходным сопротивлением, узкополосный усилитель 12, детектор 13, дифференциальный усилитель 14, источник образцового напряжения 15, аналого-цифровой преобразователь 16, встраиваемую микроЭВМ 17, цифровой индикатор 18, ограничитель 19, винт 20, грузик 21, причем катушка 7 электромагнита подключена к выходу усилителя компенсационного тока 9 и через разделительный конденсатор С - к выходу генератора 11 высокочастотного тока, и к его же выходу подключен вход узкополосного усилителя 12, настроенного на частоту генератора 11 высокочастотного тока, а выход узкополосного усилителя 12 соединен с детектором 13, выход которого подключен к первому входу дифференциального усилителя 14, второй вход которого соединен источником 15 образцового напряжения, а к выходу дифференциального усилителя 14 подключен аналого-цифровой преобразователь (АЦП) 16, выход которого соединен с информационным входом микроЭВМ 17, выходы которой подключены к управляющему входу ЦАП 10 и цифровому индикатору 18.
Электронные цифровые весы работают следующим образом. Начальному уравновешенному состоянию весов (при отсутствии груза на грузоприемной платформе 2) соответствует начальное значение σ0 воздушного зазора между якорем 5 и магнитопроводом 6 электромагнита. Этой величине зазора соответствует определенное значение UB0 высокочастотного сигнала, снимаемого с катушки 7 электромагнита и поступающего на вход узкополосного усилителя 12, а следовательно, и соответствующее значение Ud0 постоянного напряжения, поступающего с выхода детектора 13 на один из входов дифференциального усилителя 14. На второй вход дифференциального усилителя 14 поступает точно такое же напряжение U0 = Ud0 с выхода источника образцового напряжения 15. Сигнал разбаланса Uр на выходе дифференциального усилителя 14 при этом будет равен нулю. Соответственно на вход микроЭВМ 17 с выхода АЦП 16 будет поступать нулевой код, и, значит, на входы ЦАП 10 и цифрового индикатора 18 будет поступать нулевой код, а следовательно, ток в катушке электромагнита, поступающий с выхода усилителя компенсационного тока 9, также будет равен нулю. При этом переменный высокочастотный ток, протекающий через катушку 7 электромагнита, не будет создавать притягивающей силы, во-первых, из-за его малости, а во-вторых, потому что в проводящем ферромагнитном якоре 5 будут индуцироваться вихревые токи, магнитный поток которых будет частично компенсировать ту часть переменного магнитного потока, которая замыкается через якорь.
При наличии на грузоприемной платформе 2 взвешиваемого груза 3 равновесие нарушится, воздушный зазор между якорем 5 и магнитопроводом 6 электромагнита увеличится до предельного значения, определяемого ограничителем 19, что приведет к уменьшению и индуктивного, и активного сопротивления катушки 7 электромагнита. При этом падение напряжения на катушке 7 электромагнита уменьшится, так как переменный ток, протекающий по катушке, не будет зависеть от величины ее полного сопротивления, поскольку генератор 11 высокочастотного тока работает в режиме генератора тока, то есть обладает высоким выходным сопротивлением, а выход усилителя компенсационного тока 9 не будет оказывать влияния, поскольку выходное сопротивление усилителя тока также будет очень большим (много больше полного сопротивления катушки 7 электромагнита). Соответственно уменьшится и сигнал Ud, снимаемый с выхода детектора 13, и на выходе дифференциального усилителя 14 появится сигнал разбаланса Uр, преобразуемый АЦП 16 в цифровой код, поступающий на информационный вход микроЭВМ 17. микроЭВМ 17 начинает наращивать числовое значение кода, поступающего на управляющий вход ЦАП 10. Соответственно начнет возрастать выходной ток усилителя компенсационного тока 9, протекающий через катушку 7 электромагнита. Под действием этого тока возникает усилие, притягивающее якорь 5 электромагнита. Когда оно превзойдет силу тяжести взвешиваемого груза, зазор начнет уменьшаться и сигнал высокочастотного тока на катушке 7 электромагнита начнет уменьшаться. Соответственно будет уменьшаться сигнал, поступающий на вход микроЭВМ 17 с выхода АЦП 16. МикроЭВМ 17 начинает уменьшать значение управляющего кода, подаваемого на ЦАП 10, причем скорость изменения кода (а значит и тока электромагнита) согласовывается со скоростью уменьшения зазора таким образом, чтобы обеспечить критический динамический режим подхода якоря 5 к равновесному состоянию, соответствующему начальному значению зазора σ0. При этом обеспечивается минимальное время взвешивания. Минимизации времени взвешивания будет способствовать и небольшой диапазон возможных изменений зазора, определяемых ограничителями 19. Код, соответствующий достигнутому состоянию равновесия, индицируется цифровым индикатором 18 и соответствует массе взвешиваемого груза.
Для начального уравновешивания весов используется перемещаемый по винту 20, которым заканчивается длинное плечо коромысла 1, грузик 21. Неравноплечее коромысло позволяет уменьшить величину необходимого компенсирующего усилия, то есть мощность электромагнита. При этом катушка 7 электромагнита неподвижна, что устраняет все трудности токоподвода к ней, которые имеют место в магнитоэлектрических системах.
Использование управляющей микроЭВМ позволяет легко реализовать любые алгоритмы уравновешивания, а также осуществлять различные сервисные функции, в частности, запоминание и компенсацию веса тары, введение цены взвешиваемого товара и вычисление стоимости его взвешиваемого количества и т. п.
Современная элементная база позволяет реализовать всю электронную систему достаточно просто и дешево. В частности, имеются однокристальные микроЭВМ со встроенными ЦАП, АЦП, источником образцового напряжения, генератором тактовой частоты и таймером, что покрывает большую часть функциональных узлов, приведенных на чертеже. Останется лишь добавить усилитель тока в канал формирования компенсирующего тока (9) и в канал высокочастотного генератора (сам генератор высокой частоты при этом не нужен, так как сигнал соответствующей частоты может быть получен с выхода таймера), а также узкополосный усилитель и дифференциальный усилитель, которые могут быть реализованы на одной микросхеме К140УД20, представляющей собой сдвоенный операционный усилитель. Изготовление электромагнита не представляет никаких затруднений (в частности, в качестве магнитопровода может быть использован стандартный броневой ферритовый магнитопровод Б-48 2000НМ). Механическая часть весов очень проста и не вызывает никаких технологических трудностей. Таким образом, поставленная техническая задача выполнена.
| название | год | авторы | номер документа |
|---|---|---|---|
| Весоизмерительное устройство с подсчетом стоимости | 1975 |
|
SU535465A1 |
| Весы с электромагнитным уравновешиванием | 1986 |
|
SU1352235A1 |
| ЭЛЕКТРОННЫЕ ВЕСЫ | 1993 |
|
RU2050528C1 |
| МЕТАЛЛООБНАРУЖИТЕЛЬ | 1999 |
|
RU2170445C2 |
| Автоматическое весоизмерительноеуСТРОйСТВО | 1979 |
|
SU851107A1 |
| МОСТОВОЙ ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ МНОГОЭЛЕМЕНТНЫХ ПАССИВНЫХ ДВУХПОЛЮСНИКОВ | 1998 |
|
RU2144195C1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2105270C1 |
| Весоизмерительное устройство с подсчетом стоимости | 1979 |
|
SU885818A1 |
| Автоматические весы | 1987 |
|
SU1441204A1 |
| СПОСОБ ДЛЯ НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ МНОГОСЛОЙНЫХ ИЗДЕЛИЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1998 |
|
RU2168722C2 |
Изобретение относится к весоизмерительной технике и предназначено для использования в производственных условиях, торговле и быту для точного взвешивания грузов. Весы содержат коромысло, короткое плечо которого соединено с грузоприемной платформой, а длинное - с подвижной частью компенсационного устройства. Электромагнит используют в качестве компенсационного устройства и в качестве датчика отклонения подвижной части от равновесия. Электронная система включает генератор высокочастотного тока, узкополосный усилитель, детектор, дифференциальный усилитель, источник опорного напряжения, аналого-цифровой преобразователь, микроЭВМ, цифроаналоговый преобразователь, цифровой индикатор и усилитель компенсационного тока. Технический результат - повышение технологичности производства весов при сохранении высокой точности и основных сервисных функций за счет упрощения конструкции компенсационного устройства. 1 ил.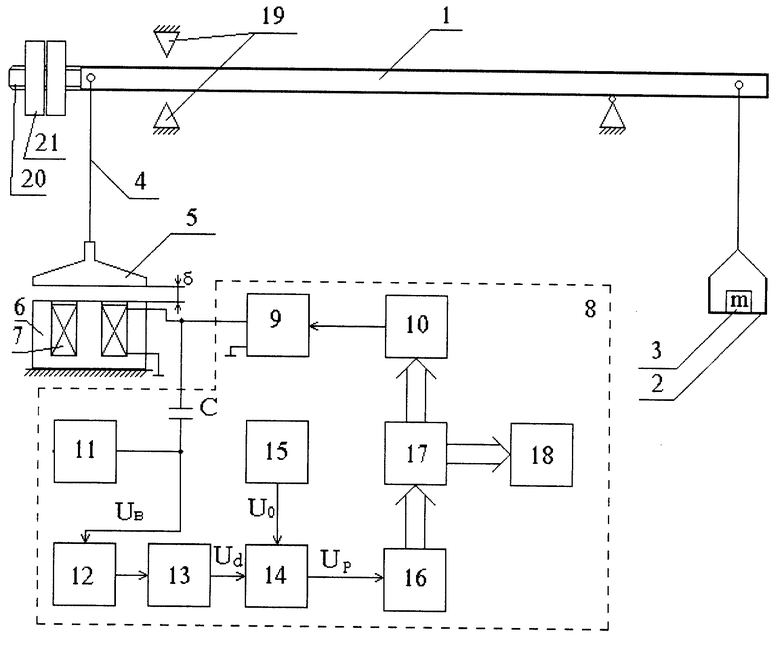
Электронные цифровые весы, содержащие коромысло, короткое плечо которого соединено с грузоприемной платформой, а длинное - с подвижной частью компенсационного устройства, датчик отклонения подвижной части от состояния равновесия, электронную систему автоматического уравновешивания и цифровой индикатор, отличающиеся тем, что в качестве компенсационного устройства используется электромагнит и этот же электромагнит используется в качестве датчика отклонения подвижной части от состояния равновесия, а электронная система содержит генератор высокочастотного тока, узкополосный усилитель, детектор, дифференциальный усилитель, источник опорного напряжения, аналого-цифровой преобразователь, микроЭВМ, цифроаналоговый преобразователь, цифровой индикатор, усилитель компенсационного тока, причем выход высокочастотного генератора и вход узкополосного усилителя через разделительный конденсатор подключены к катушке электромагнита, которая непосредственно подключена к выходу усилителя компенсационного тока, вход которого соединен с выходом цифроаналогового преобразователя, а выход узкополосного усилителя соединен со входом детектора, выход которого подключен к одному из входов дифференциалтьного усилителя, второй вход которого соединен с источником образцого напряжения, выход дифференциального усилителя подключен к аналого-цифровому преобразователю, выход которого соединен с информационным входом микроЭВМ, а выход микроЭВМ подключены ко входу цифроаналогового преобразователя и к цифровому индикатору.
| Весы с электромагнитным уравновешиванием | 1986 |
|
SU1345061A1 |
| ВЕСЫ С МАГНИТОЭЛЕКТРИЧЕСКИМ УРАВНОВЕШИВАНИЕМ ДЛЯ ИССЛЕДОВАНИЯ МАТЕРИАЛОВ | 1992 |
|
RU2047846C1 |
| ШТАММ БАКТЕРИЙ BACILLUS SUBTILIS - ПРОДУЦЕНТ РИБОФЛАВИНА | 1994 |
|
RU2081906C1 |
| DE 4001614 A1, 25.07.1991. | |||
