дачи кодированных гидроакустических сигна;ioB. Недостатком этой системы в случае ее применения для запуска измерительной геофизической или океа.но графической аппаратуры является, прежде всего, ее сложность, а, следовательно, и дороговизна и, кроме того, применение этой системы ИСключает автономность работы донной аппаратуры.
Цель изобретения - обеспечение запуска измерительного устройства, например автоматического гравиметра, размещенного в погружном контейнере, в момент посадки на дно водоема.
Достигается это тем, что источник звуковых сигналов, выполненный в виде герметичного двигателя со стартскопным и ударным механизмами, установлен на внешней поверхности контейнера в его донной части, а функциональная схема размещена внутри погружного контейнера, .причем акустическим каналом .связи между источником и приемником звуковых сигналов функциональной схемы служит корлус контейнера.
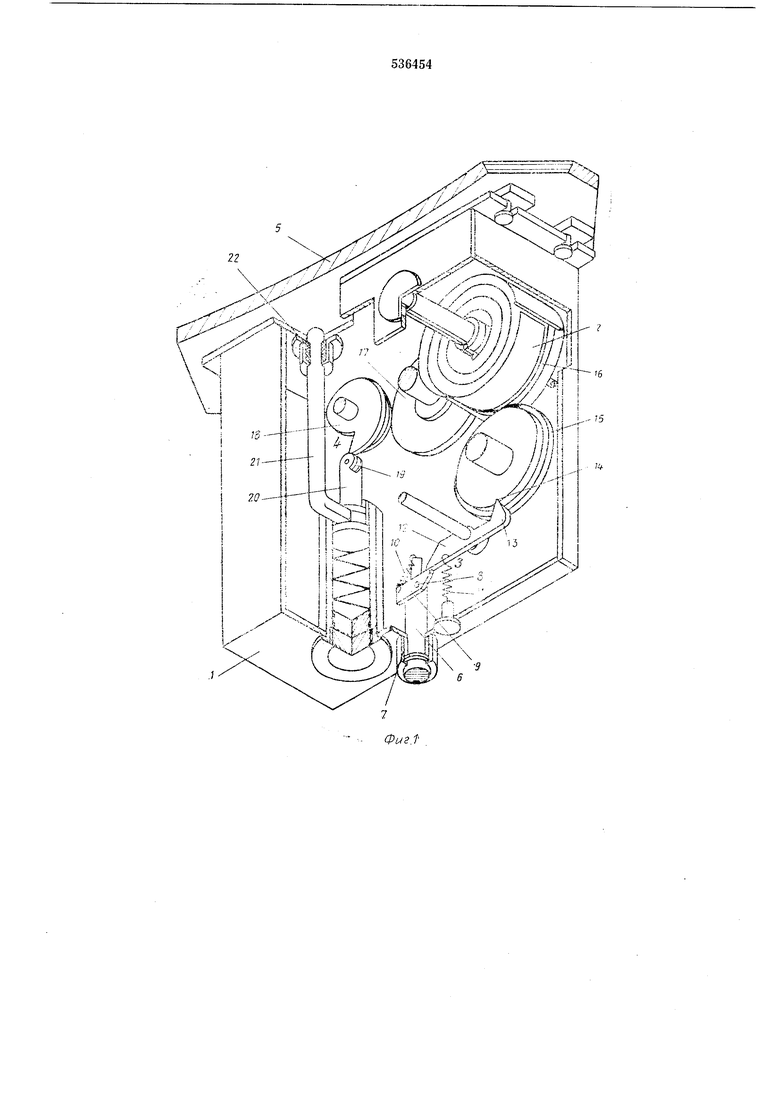
На фиг. 1 - схема подводной пусковой системы для погружных автономных измерительных устройств; на фиг. 2 - функциональная схема подводной пусковой системы.
iB лодводной пусковой системе источник звуковых сигналов представляет собой размещенный в .маслонаполненном корпусе / пружинный двигатель 2 многосерийного действия со старт-стопны.м 3 и ударным 4 механизмами для возбуждения звуковых колебаний производством -серии ударов но корпусу контейнера 5 в момент лосадкИ его на грунт. Старт-стопный механизм 5 имеет подпружииенный шток 6, которому обеспечена воз.чожность возвратно-поступательного движения по вертикали. Нижний конец этого штока через сальниковое уплотнение 7 в корпусе I выведен наружу для взаимодействия, например, через какую-то площадку, с грунтом при посадке контейнера. На другом конце штока 6 перпендикулярно к нему на оси 8 установлена собачка 9, один конец которой закреплен пружинкой W, а второй находится в зацеплении с одним плечом удерживае.мого в исходном положении пружиной -11 поворотного двуплечего рычага-фиксатора 12. Рычаг-фиксатор 12 с другим своим плечом 13 входит в фиксирующий паз 14 зубчатой шестерни 15. Шестерня 15 находится в зацеплении с зубчатой шестерней 16, жестко посаженной на валик пружинного двигателя 2.
В свою очередь шестерня 16 через зубчатую передачу /7 с передаточным числом, определяющим число ударов в серии, связана с кулачком 18, имеющим -форму, определяе;мую в плане площадью, ограниченной витком Архи.медовой -спирали, и приводящим при его вращении в возвратно-поетупательное движение ударный механизм 4 через ролик 19, установленный на подпружиненном толкателе 20 с ударником 21. Конец ударника 21 через сальниковое уплотнение 22 выведен наружу
с целью осуществления ударного контакта с поверхностью погружного контейнера 5.
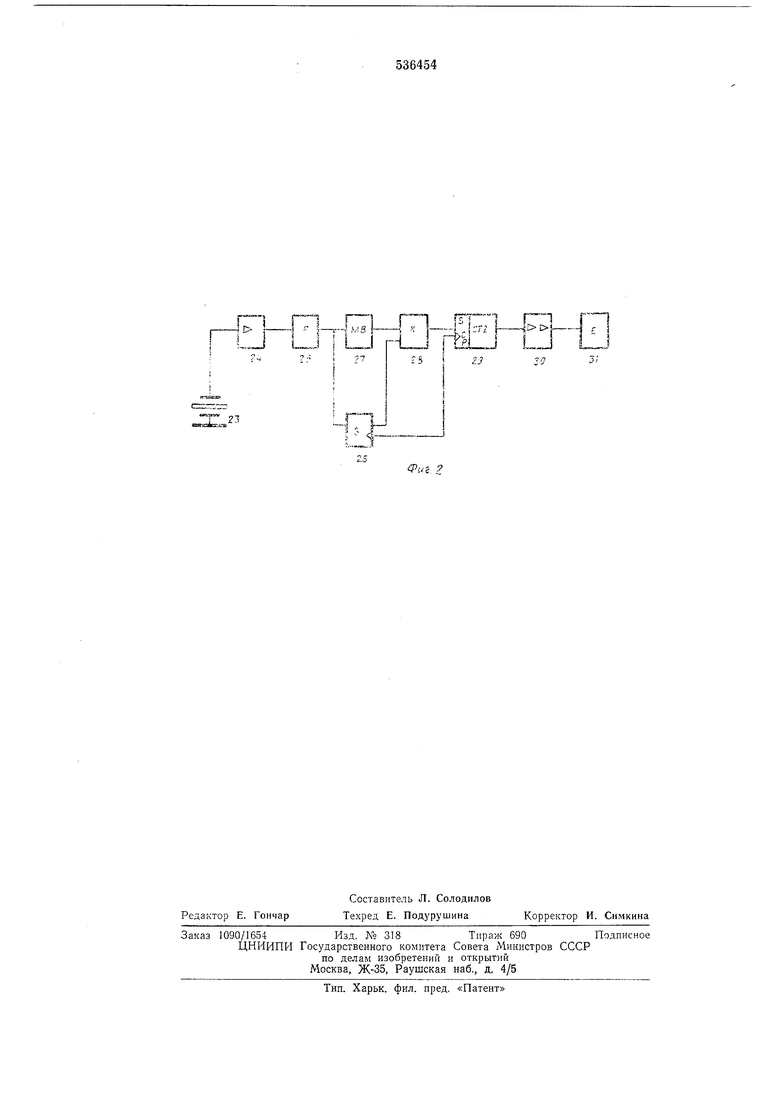
В функциональной схеме подводной пусковой системы в качестве приемного устройства звуковых колебапий применен пьезоэлектрический датчик давления 23.
Каскад формирования пря-моугольных импульсов состоит из схем предварительного широкополосного усилителя 24 и формирователя
прямоугольных импульсов 25, схемным решением которого является усилитель-ограничитель.
Блок ключевого устройства состоит из реле времени, собранного по схеме одновибратора
26, из формирователя коротких импульсов, представляющего собой ждущий мультивибратор 27, а также собственно ключа 28.
Пересчетное устройство 29 представляет собой два последовательно включенных триггера, выход его подключен к входу усилителя мощности 30. Усилитель мощности 30, собранный на интегральной схеме, подключен к исполнительному устройству, представляюще.му собой тиристорную переключающуюся схему.
Устройство работает следующим образом. В момент посадки контейнера на дно водоема -в результате взаимодействия с грунтом подпружиненный шток 6 утапливается внутрь маслонаполненного корпуса /, при этом собачка 9 одним своим плечом поворачивает подпружиненный двуплзчий рычаг-фиксатор /2, выводя его -плечо 13 из фиксирующего паза 14 зубчатой шестерни 15. Как только плечо 13 рычага-фиксатора 12 выйдет из фиксирующего паза 14, плечо собачки 9 проскочит подпружиненмое плечо рычага-фиксатора 12 и последний под действием пружины // будет стремиться занять исходное положение, но к этому .моменту пруж-инный двигатель, придя
во вращение, сместит фиксирующий .паз, и рычаг-фиксатор будет скользить до следующего совпадения с фиксирующим пазом. Тем временем прул инный двигатель 2 через зубчатую шестерню 16 и зубчатую передачу П
приводит во вращение кулачок 18, последний, :в свою очередь, через ролик 19 приводит в возвратно-поступательное движение подпружиненный толкатель 20 с ударником 2/, производящим удар по корпусу контейнера каждый раз, когда ролик 19 соскакивает с кулачка 18, но так, что в момент удара не касается нижней направляющей поверхности кулачка. Таким образом, за один -оборот шестерни 15 до момента входа плеча 13 рычага-фиксатора 12 в фиксирующий паз 14 зубчатой шестерни 15, т. е. стопорепия пружинного двигателя, по корпусу контейнера производится серия из 4 ударов, каждый из которых вызывает колебания ко-р.пуса контейнера.
Звуковые колебания воспринимаются пьезоэлектрически)М датчиком давления 23. Сигналы, снимаемые с датчика, имеют широкую спектральную характеристику с амплитудой порядка 100 мкв. Зти сигналы усиливаются
предварительным широкополосным усилителем 24 и формируются s серию прямоугольных импульсов формирователем 25. Передним фронтом сигналов одновр еменно занускается реле времени - одновибратор 26 и ждущий мультивибратор 27, формирующий короткие импульсы. Затем однови-братором 26 открывается ключ 28 и начинается счет импульсов пересчетным устройством 29, имнульс считывания с которого подается на усилитель мощHOiCTH 30. Сброс считывания импульсов осуществляется задним фронтом одновибратора, .исключая, таким образом, включение системы от случайных единичных или нескольких с разными интервалами во времени поступающих сигналов. С усилителя мощности 30 стартовый сигнал поступает на .исполнительное устройство 31.
При отрыве погружного контейнера от дна по заверщении измерений подпружиненный щток 6 возвращается в исходное положение, при этом собачка 9 встречает на своем плечо .рычага-фиксатора 12, заставляющее ее повернуться на оси 8. После проскакив ания плеча рычага-фиксатора под действием пружинки W собачка 9 также занимает исходное положение.
Подводная пусковая система готова к следующему циклу.
Формула изобретения
Подводная пусковая система для погружных автономных измерительных устройств,
размещенных в погружном контейнере, содержащая источник звуковых сигналов и функциональную схему, состоящую из приемника звуковых сигналов и электронной схемы, о тличающаяся тем, что, с целью обеспечения запуска измерительного устройства, например автоматического гравиметра, размещенного в погружном «одтейнере, в момент посадки на дно водоема, источник звуковых сигналов выполнен в виде герметичного двигателя со старт-столным и ударным механизмами, установлен на внешней поверхности контейнера в его донной части, а функциональная схема размещена внутри контейнера, причем акустическим каналом связи между
источником и приемником звуковых сигналов функциональной схемы служит корпус контейнера.
Источники информации, принятые во внимание .при экспертизе
1.Патент США № 3772639, кл. 340-2, опубликован 13.11.73.
2.Патент США № 3750096, кл. 340-52, опубликован 31.07.73 (прототип).
гг
9
.pU rjUr7 -Jp;:i III - 
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ ДЛЯ ИНСТРУМЕНТОВ УДАРНОГО ДЕЙСТВИЯ | 1997 |
|
RU2116188C1 |
| ГРАНАТОМЕТНАЯ СИСТЕМА | 2010 |
|
RU2421676C1 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ ИНСТРУМЕНТ (ВАРИАНТЫ) | 2014 |
|
RU2676512C2 |
| Хирургические инструменты с приводом от двигателя, выполненные с возможностью шарнирного поворота | 2014 |
|
RU2676863C2 |
| ИНТЕРАКТИВНЫЕ ДИСПЛЕИ | 2014 |
|
RU2695598C2 |
| УСТРОЙСТВА ВТЯГИВАНИЯ ПУСКОВОГО ЭЛЕМЕНТА ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ С ЭЛЕКТРОПИТАНИЕМ | 2014 |
|
RU2678363C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ, КОРПУС ДЛЯ ПРИМЕНЕНИЯ С ХИРУРГИЧЕСКИМ ИНСТРУМЕНТОМ И УЗЕЛ ХИРУРГИЧЕСКОГО ИНСТРУМЕНТА | 2014 |
|
RU2669856C2 |
| ХИРУРГИЧЕСКАЯ ИНСТРУМЕНТАЛЬНАЯ СИСТЕМА | 2014 |
|
RU2693674C2 |
| КОНСТРУКЦИИ ПРОВОДНИКОВ ДЛЯ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ С ЭЛЕКТРОПИТАНИЕМ И ВРАЩАЮЩИМИСЯ КОНЦЕВЫМИ ЭФФЕКТОРАМИ | 2014 |
|
RU2684036C2 |
| ЦЕПЬ ДЛЯ ЗАЩИТЫ ОТ НЕСАНКЦИОНИРОВАННОГО ПРИМЕНЕНИЯ БЛОКА АККУМУЛЯТОРНЫХ БАТАРЕЙ ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ | 2014 |
|
RU2676525C2 |