(54) РЕГУЛЯТОР ДАВЛЕНИЯ
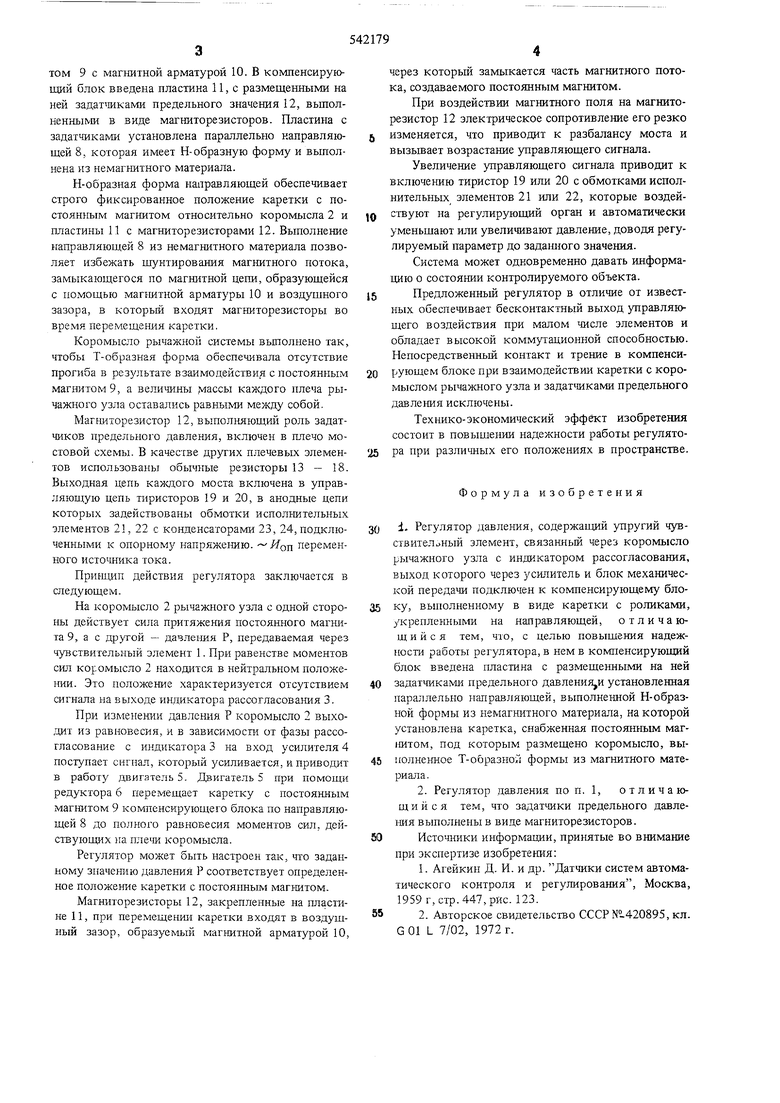
том 9 с магнитной арматурой 10. В компенсирующий блок введена пластина 11, с размещенными на ней задатшками предельного значения 12, выполненньшш в виде магниторезисторов. Пластина с задатчика ли установлена параллельно направляющей 8, которая имеет Н-образную форму и выполнена из немагрштного материала.
Н-образная форма направляющей обеспечивает строго фиксированное положение каретки с постоянным магнитом относительно коромысла 2 и пластины 11с магниторезисторами 12. Вьшолнение направляющей 8 из немагнитного материала позволяет избежать щунтирования магнитного потока, замыкающегося по магнитной цепи, образующейся с помощью магьштной арматуры 10 и воздушного зазора, в который входят магниторезисторы во время перемещения каретки.
Коромысло рычажной системы вьшолнено так, чтобы Т-образная форма обеспечивала отсутствие прогиба в результате взаимодействия с постоянным магнитом 9, а величины массы каждого плеча рычажного узла оставались равными между собой.
Магниторезистор 12, выполняющий роль задатчиков предельного давления, включен в плечо мостовой схемы. В качестве других плечевых элементов использованы обычные резисторы 13 18. Выходная цепь каждого моста включена в управляющую цепь тиристоров 19 и 20, в анодные депи которых задействованы обмотки испольштельных элементов 21, 22 с конденсаторами 23, 24, подключенными к опорному напряжению. - HQ переменного источника тока.
Прищип действия регулятора заключается в следующем.
На коромысло 2 рычажного узла с одной стороны действует сила притяжения постоянного магнита 9, а с другой - дачле шя Р, передаваемая через чувствительный элемент 1. При равенстве моментов сил коромысло 2 находится в нейтральном положении. Это положение характеризуется отсутствием сигнала на выходе индикатора рассогласования 3.
При изменении давления Р коромысло 2 выходит из равновесия, и в зависимости от фазы рассогласование с индикатора 3 на вход усилителя 4 поступает сигнал, который усиливается, и приводит в работу двигатель 5. Двигатель 5 при помощи редуктора 6 перемещает каретку с постоянным магнитом 9 компенсирующего блока по направляющей 8 до по.чного равновесия моментов сил, действующих на пле™ коромысла.
Регулятор может быть настроен так, что заданному значению давления Р соответствует определенное положение каретки с постоянным .
Магниторезисторы 12, закрепленные па пластине И, при перемещении каретки входят в воздушный зазор, образуемый магнитной арматурой 10,
через который замыкается часть магнитного потока, создаваемого постоянным магнитом.
При воздействии магнитного ноля на магниторезистор 12 электрическое сопротивление его резко
изменяется, что приводит к разбалансу моста н вызьтает возрастание управляющего сигнала.
Увеличение управляющего сигнала приводит к включению тиристор 19 или 20 с обмотками исполнительных элементов 21 или 22, которые воздействуют па регулирующий орган и автоматически уменьшают или увеличивают давление, доводя регулируемый параметр до задащ{ого значения.
Система может одновременно давать информацию о состоянии контролируемого объекта.
Предложенный регулятор в отличие от известных обеспечивает бесконтактный выход управляющего воздействия при малом числе элементов и обладает высокой коммутадионной способностью. Непосредственный контакт и трение в компенсирующем блоке при взаимодействии каретки с коромыслом рычажного узла и задатшками предельного давления исключены.
Технико-экономический эффйст изобретения состоит в повыше1ши надежности работы регулятора при различных его положениях в пространстве.
Формула изобретения
i. Регулятор давления, содержащий упругий чувствител ный элемент, связанньш через коромысло рычажного узла с индикатором рассогласования, выход которого через усилитель и блок механической передачи подключен к компенсирующему блоку, выполненному в виде каретки с роликами, укрепленными на направляющей, отличающийся тем, что, с целью повышения надежности работы регулятора, в нем в компенсируюпдай блок введена пластина с размещенными на ней
задатчиками предельного давлениями установленная параллельно направляющей, выполненной Н-образной формы из немагнитного материала, на которой установлена каретка, снабженная постоянным магнитом, под которым размещено коромысло, выиолненное Т-образной формы из магнитного материала.
2. Регулятор давления по п. 1, отличающийся тем, что задатчики предельного давле1-шя выполнены в виде магниторезисторов.
Источники информации, принятые во внимание
при экспертизе изобретения:
1. Агейкин Д. И. и др. Датчики систем автоматического контроля и регулирования, Москва, 1959 г, стр. 447, рйс. 123.
2. Авторское свидетельство СССР N1420895, кл.
G01 L 7/02, 1972г.
I I
P
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор уровня жидкости | 1979 |
|
SU840822A1 |
| РОТАЦИОННАЯ РЕМИЗОПОДЪЕМНАЯ КАРЕТКА С ЭЛЕКТРОННОЙ АВТОМАТИЧЕСКОЙ СИСТЕМОЙ УПРАВЛЕНИЯ | 1992 |
|
RU2067135C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЖИДКОСТИ | 1996 |
|
RU2095785C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО ДЛЯ ПНЕВМОПРИВОДОВ ШАРОВЫХ КРАНОВ | 2001 |
|
RU2180057C1 |
| СПОСОБ МАКСИМОВА Э.Б. ДЛЯ ФИЗИОТЕРАПЕВТИЧЕСКОГО ВОЗДЕЙСТВИЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2316364C2 |
| МАГНИТНЫЙ БЛОК КАК СРЕДСТВО БЛОКИРОВКИ МАГНИТНОГО КОДОВОГО ЗАМКА | 2010 |
|
RU2443841C2 |
| АППАРАТ ДЛЯ ВИБРАЦИОННО-МЕХАНИЧЕСКОГО МАССАЖА ПОЗВОНОЧНИКА | 2008 |
|
RU2386428C1 |
| Линейный электрогенератор | 2024 |
|
RU2830458C1 |
| УСТАНОВКА ДЛЯ ПОДВОДНОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 1992 |
|
RU2040230C1 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 2000 |
|
RU2171406C1 |


8
fpuz.Z
22
Фиг.З
