Изобpетение относится к медицине, в частности к средствам для лечения некоторых видов заболеваний позвоночника.
Наиболее близкой к предлагаемой по технической сущности и назначению является (см. авт.св. СССР N 482952, кл. A 61 F 5/37, 1970) установка, содержащая фиксаторы пациента, пояс, трос, направляющие ролики, рычаг, подвижно соединенный с несущей груз кареткой и с тросом, реверсивный электропривод каретки и пульт управления. Для изменения амплитуды нагрузки груз выполнен наборным. Два концевых выключателя, взаимодействующих с кареткой в крайних ее положениях, определяют фиксированное время изменения нагрузки. Время стабилизации нагрузки задается входящим в пульт управления реле времени.
Недостатки прототипа заключаются в следующем:
фиксированное время изменения нагрузки сужает функциональные возможности установки;
необходимость изменять амплитуду нагрузки за счет наборного груза усложняет работу медсестры, которая должна до начала процедуры установить на каретку комплект гирь по 2 кг каждая, причем потребность в коррекции первоначального груза после начала пpоцедуры, когда пациент находится в бассейне под грузовой кареткой, связана с травматической опасностью, а это значит, что зафиксированный в бассейне пациент в случае коррекции величины груза должен повторно проделать все предварительные этапы процедуры;
сложность реализации нескольких циклов вытяжения и нелинейных зависимостей нагрузки от времени;
нежелательность применения электропривода в особо сыром помещении, каким является бассейн (ванна) для вытяжения;
обязательность горизонтального положения грузового рычага требует усложнения установки приспособлением для компенсации разницы роста пациентов.
Цель изобретения расширение функциональных возможностей установки путем повышения гибкости управления временными параметрами нагрузки.
Для этого в установке для подводного вытяжения позвоночника, содержащей фиксаторы и пояс пациента, трос с направляющими роликами, связанный с поясом, и блок управления; блок управления выполнен в виде присоединенного к тросу датчика усилия, программного задатчика, регулятора нагрузки и сервомотора, например пневматического, с золотником, при этом датчик усилия и программный задатчик подключены к элементу сравнения регулятора нагрузки, выход регулятора связан с золотником сервомотора, а к штоку поршня сервомотора присоединен конец троса.
Кроме того, регулятор выполнен в виде микропроцессора, а программный задатчик в виде постоянного запоминающего устройства, на выходе которого подключено табло, а на входе клавиатура для задания параметров процедуры медсестрой.
В установку введены дополнительный датчик усилия, сигнализатор предельной нагрузки с задатчиком и атмосферный клапан, установленный на сервомоторе со стороны штока поршня, причем дополнительный датчик усилия присоединен к тросу, его выход подключен к сигнализатору, выход которого связан с атмосферным клапаном, а задатчик сигнализатора подключен к программному задатчику.
Установка дополнительно снабжена щитовым ложем, установленным в ванне, на котором закреплены фиксаторы пациента и направляющие ролики.
На фиг. 1 приведена комбинированная схема общего вида и функциональная электропневматическая схема установки; на фиг.2 показаны варианты временных графиков нагрузки.
Установка содержит фиксаторы 1 пациента, пояс 2, трос 3, направляющие ролики 4. В нее введены датчик 5 усилия, программный задатчик 6, регулятор 7 нагрузки, сервомотор 8 с золотником 9. Позицией 10 обозначен элемент сравнения регулятора 7. Позициями 11 и 12 соответственно шток и поршень сервомотора. В программный задатчик 6 введены постоянное запоминающее устройство 13, индикаторное табло заданных параметров процедуры, включающее индикаторы: амплитуды нагрузки 14, времени изменения нагрузки 15, времени стабилизации нагрузки 16, количества циклов 17. Также введена клавиатуры, включающая кнопки: амплитуды нагрузки 18 (АН), времени изменения 19 (ВИ), времени стабилизации 20 (ВС), количества циклов 21 (КЦ), "Пуск" 22, "Больше" 23 ( ), "Меньше" 24 (
), "Меньше" 24 ( ), "Стоп" 25. Установку также введены дополнительный датчик 26 усилия, сигнализатор 27 предельной нагрузки с задатчиком 28, атмосферный клапан 29, ванна 30, щитовое ложе 31, логический элемент ИЛИ 32, верхний 33 и нижний 34 поршни, шток 35 золотника 9; измеритель нагрузки 36 и измеритель времени процедуры 37.
), "Стоп" 25. Установку также введены дополнительный датчик 26 усилия, сигнализатор 27 предельной нагрузки с задатчиком 28, атмосферный клапан 29, ванна 30, щитовое ложе 31, логический элемент ИЛИ 32, верхний 33 и нижний 34 поршни, шток 35 золотника 9; измеритель нагрузки 36 и измеритель времени процедуры 37.
Узлы и элементы соединены следующим образом.
Блок управления выполнен в виде присоединенного к тросу 3 датчика 5 усилия, программного задатчика 6, регулятора 7 нагрузки и сервомотора 8 (пневматического) с золотником 9, имеющим шток 35. Датчик 5 усилия и программный задатчик 6 подключены к элементу сравнения 10 регулятора 7. Выход регулятора 7 связан с золотником сервомотора 8, а к штоку 11 поршня 12 сервомотора 8 присоединен конец троса 3. Регулятор 7 нагрузки выполнен в виде микропроцессора, а программный задатчик 6 в виде запоминающего устройства 13, на выходе которого подключено табло, а на входе подключена клавиатура для задания параметров процедуры медсестрой. Атмосферный клапан 29 установлен на сервомоторе 8 со стороны штока 11 поршня 12. Дополнительный датчик 26 усилия присоединен к тросу 3. Выход датчика 26 усилия подключен к сигнализатору 27, выход которого связан с атмосферным клапаном 29. Задатчик 28 сигнализатора 27 подключен к программному задатчику 6. На щитовом ложе 31 закреплены фиксаторы 1 пациента и направляющие ролики 4. Ложе установлено в ванне 30.
Установка работает следующим образом.
Больной, погруженный в ванну 30, удерживается на щитовом ложе 31 с помощью укрепленных на нем подмышечных фиксаторов 1 (при шейном остеохондрозе используется петля Глиссона). Нагрузка на позвоночник прикладывается через пояс 2 с помощью троса 3 и направляющих роликов 4. Передачу усилия от троса к поясу удобно осуществить с помощью простого фиксатора пояса (авт.св. N 485612). Конец троса 3 присоединен к штоку 11 поршня 12 сервомотора 8, корпус которого жестко закреплен. Благодаря этому подача воздуха в зону над поршнем 12 перемещает его вниз, увеличивая нагрузку. Подача воздуха в зону под поршнем 12 уменьшает нагрузку. Перемещением поршня 12 управляет золотник 9, у которого на общем штоке 35 закреплены верхний и нижний поршни 33 и 34. В зону между этими поршнями подается сжатый воздух, а зоны над поршнем 33 и под поршнем 34 сообщаются с атмосферой. В частности, шток 35 может занимать три положения: верхнее сжатый воздух поступает в зону над поршнем 12, а зона под ним сообщается с атмосферой; среднее поршни 33 и 34 перекрывают поступление сжатого воздуха к сервомотору 8 и его поршень неподвижен; нижнее воздух идет в зону под поршнем 12, а зона над ним сообщается с атмосферой. Сервомотор 8 служит исполнительным механизмом в системе программного регулирования нагрузки. Датчики 5 и 26 (например тензометрические) присоединены к тросу и выдают сигнал, пропорциональный силе натяжения троса F. Датчик 5 включен в контур регулирования и его сигнал сравнивается с сигналом задания F3 программного задатчика 6 в элементе 10 сравнения на входе регулятора 7. Рассогласование εF3-F определяет поведение сервомотора 8. Если регулятор осуществляет позиционное регулирование, то при ε0 поршень 12 неподвижен; при ε >0 поршень 12 движется вниз, а при ε <0 вверх. Датчик 26 подключен к измерительному прибору 36, показывающему текущее значение нагрузки, и к сигнализатору 27 предельной нагрузки. Его задатчик 28 связан с программным задатчиком 6. Допустим, сигнал срабатывания сигнализатора Fср превышает амплитуду сигнала зaдания Fm на 1 кг. Тогда при отказе системы регулирования и превышения амплитуды нагрузки на 1 кг сигнализатор 27 через элемент ИЛИ 32 откроет соленоидный атмосферный клапан 29, сбросив нагрузку, и оповестит об этом медперсонал звуковым сигналом. Аналогичный результат может быть достигнут вручную кнопкой "Стоп" 25 при вынужденных обстоятельствах (например, по просьбе пациента медсестра, нажав кнопку 25, через элемент ИЛИ 32 открывает клапан 29, снимая нагрузку). В программном задатчике 6 происходит оптимальное использование постоянного запоминающего устройства 13 в сочетании с клавиатурой, индикаторным табло и регулятором 7 на базе микропроцессора.
Подготовка процедуры происходит следующим образом.
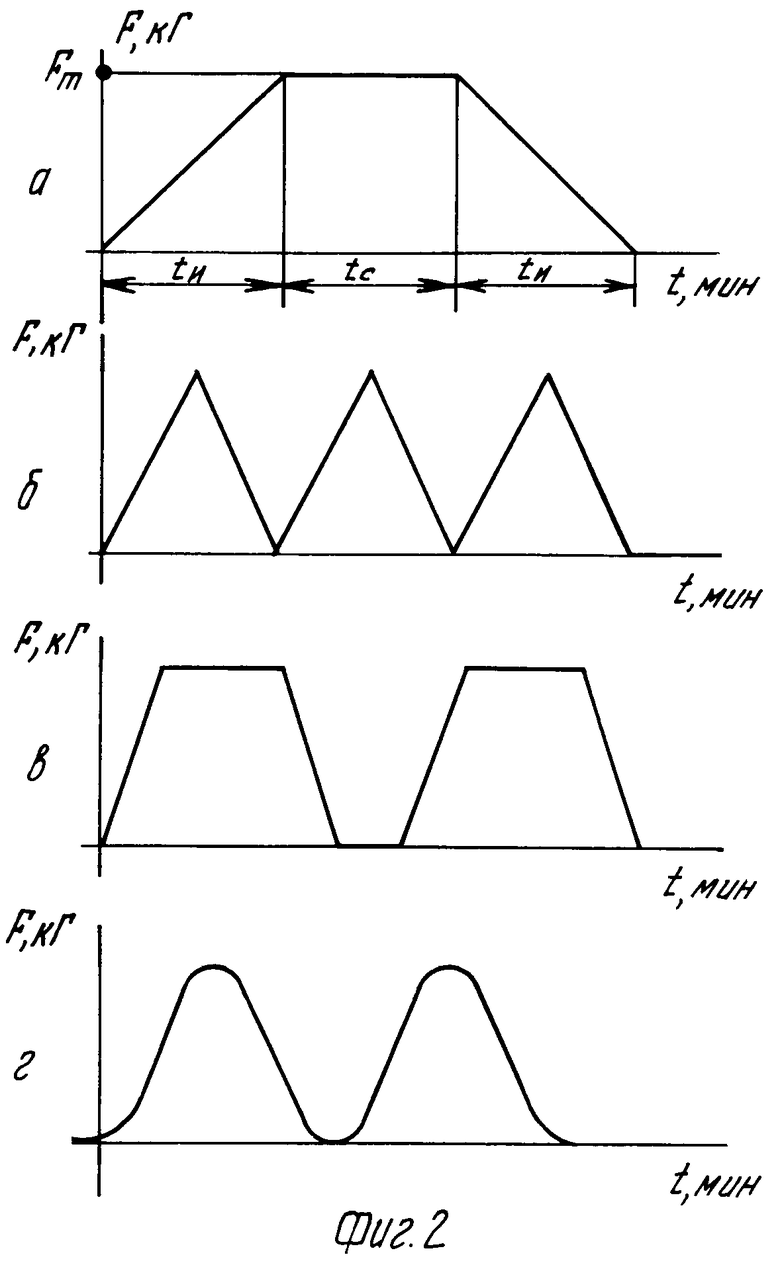
Допустим, врач, решив применить режим "б" (фиг.2), задает следующие параметры процедуры:
Амплитуда нагрузки Fm=20 кг
Время изменения нагрузки tн=5 мин
Время стабилизации нагрузки tс=0 мин
Количество циклов 3.
Длительность одной процедуры очевидно составляет 5 мин˙ 2 ˙3=30 мин.
Порядок действий медсестры следующий.
Нажать кнопку 18 (АН), после чего эта кнопка подсвечивается.
Кнопкой 23 (24) установить на индикаторе 14 амплитуду нагрузки Fm=20 кг (частота счетных импульсов от кнопки 23 (24) около 1 Гц), при этом автоматически устанавливается Fср=21 кг.
Нажать кнопку 19 (ВИ), которая также подсвечивается, причем кнопка 18 гаснет.
Кнопкой 23 (24) установить на индикаторе 15 время изменения нагрузки 5 мин.
Нажать кнопку 20 (ВС), она также подсвечивается, а кнопка 19 гаснет.
Кнопкой 23(24) установить на индикаторе 16 время стабилизации нагрузки 0 мин.
Нажать кнопку 21 (КЦ), она начнет светиться, а кнопка 20 погаснет.
Кнопкой 23(24) установить на индикаторе 17 количество циклов 3.
Перенести поршень 12 в крайнее верхнее положение, освободив трос.
Провести фиксацию пациента в ванне.
Нажать кнопку "Пуск" 22, при этом гаснет кнопка 21, включаются таймер 37 и микропроцессор регулятора 7, обеспечивающий выдачу на ПЗУ 13 параметра F 3 по установленной выше программе.
Предлагаемая установка позволяет избавить медперсонал от необходимости устанавливать перед каждой процедурой наборные грузы. Ее использование в бассейне при вертикальном вытяжении освобождает персонал от необходимости запоминать и соблюдать требование инструкции по эксплуатации установки прототипа, при которой категорически запрещается устанавливать грузы при нахождении больного в бассейне.
Установка позволяет расширить диапазон значений параметров процедуры, осуществить циклические режимы вытяжения, реализовать нелинейные зависимости (фиг. 2 в, г), решить на современном техническом уровне вопросы, связанные с программированием параметров процедуры на уровне обслуживающего установку медперсонала.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ ПОДВОДНОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 1992 |
|
RU2040231C1 |
| УСТРОЙСТВО ДЛЯ ПОДВОДНОГО ГОРИЗОНТАЛЬНОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2011 |
|
RU2465882C2 |
| Устройство для подводного вытяжения позвоночника | 1987 |
|
SU1416121A1 |
| МЕХАНОТЕРАПЕВТИЧЕСКАЯ УСТАНОВКА ДЛЯ МАССАЖА И ГРАВИТАЦИОННОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2012 |
|
RU2512959C1 |
| Устройство для механотерапии позвоночника | 2015 |
|
RU2612842C1 |
| УСТРОЙСТВО ДЛЯ МАССАЖА И ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2013 |
|
RU2539421C2 |
| СНАРЯД-ПАРАШЮТ | 1996 |
|
RU2109502C1 |
| Устройство для подводного вытяжения позвоночника | 1971 |
|
SU502532A1 |
| УСТРОЙСТВО ДЛЯ ПОДВОДНОГО ГОРИЗОНТАЛЬНОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2003 |
|
RU2257880C1 |
| Устройство для подводного вытяжения позвоночника | 1990 |
|
SU1762919A1 |
Использование: изобретение относится к техническим средствам, используемым в медицине для лечения заболеваний позвоночника (остехондроз и др.). Сущность изобретения: установка содержит фиксаторы 1 и пояс 2 пациента, трос 3 с направляющими роликами 4 и блок управления, в который введены присоединенный к тросу 3 датчик усилия 5, программный задатчик 6 с постоянным запоминающим устройством 13, табло и клавиатурой для задания параметров процедуры медсестрой, регулятор нагрузки (выполненный на базе микропроцессора) и пневматический сервомотор с золотником. Датчик усилия и программный задатчик 6 подключены к регулятору 7, выход регулятора связан с золотником сервомотора 8, а к штоку поршня сервомотора присоединен конец троса 3. 3 з.п. ф-лы. 2 ил.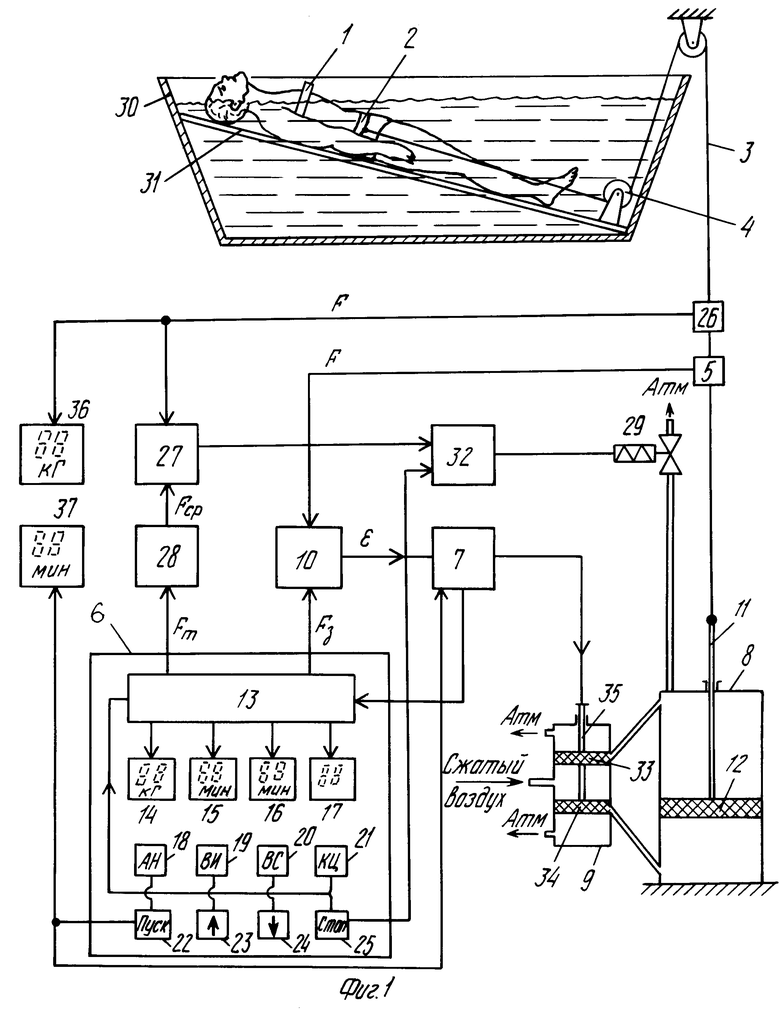
| Установка для подводного вытяжения | 1969 |
|
SU482952A1 |
