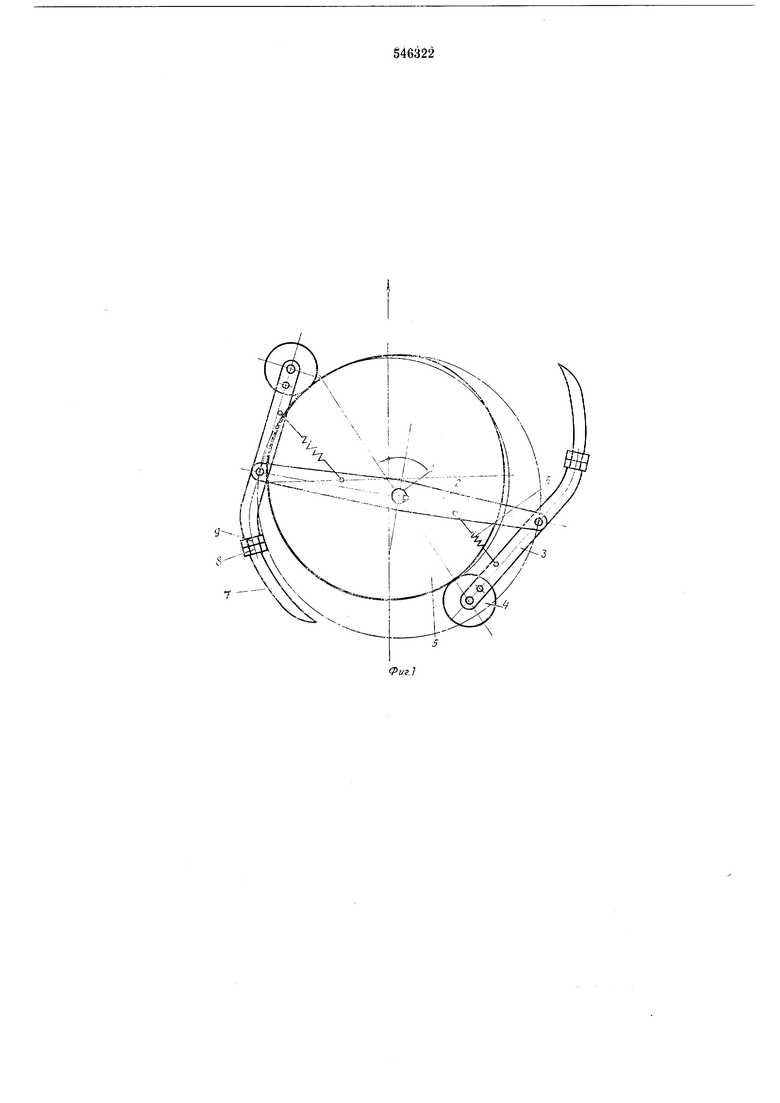
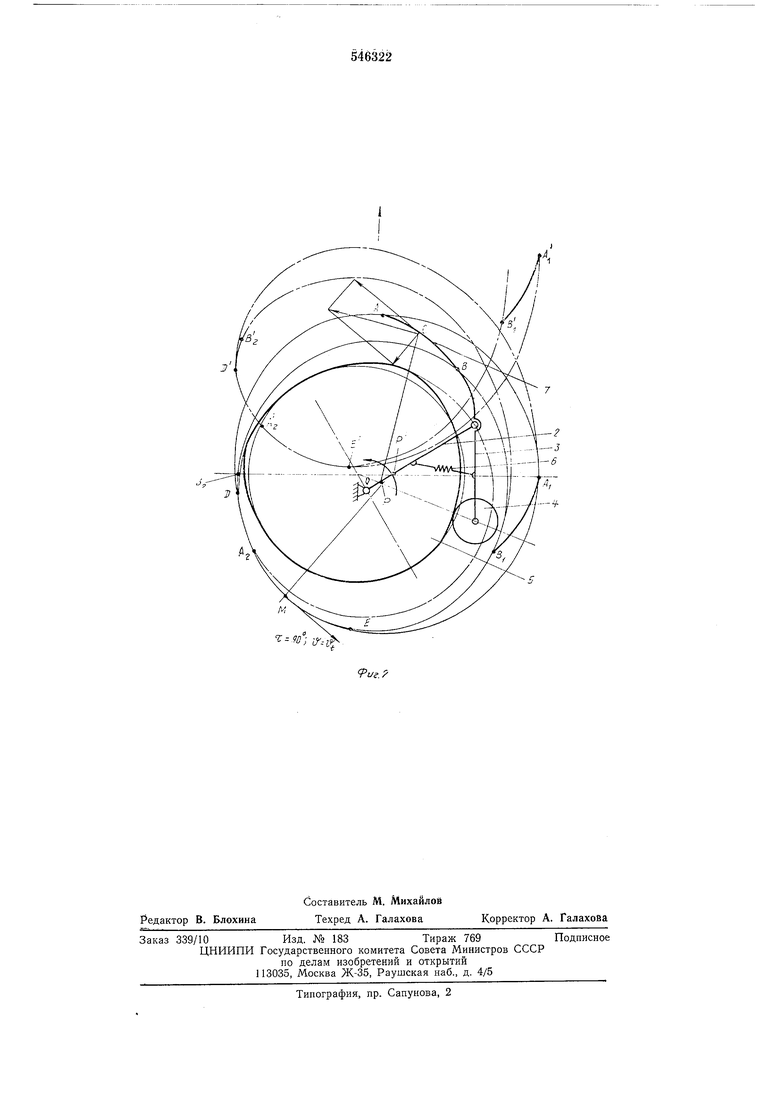
Режущий аппарат ротационного типа ряботает следующим образом. При вращении кривощипа 2 (направления движений на фиг. 1 и 2 показаны стрелками) ролики 4 катятся по боковой цилиндрической 5 поверхности копира 5. При этом держатели 3 с ножами совершают сложные движения по заданной программе - вращаясь, они одновременно совершают колебательные движения вокруг шарнира кривошипа. При одпом Ю обороте кривощипа ножи совершают полное колеоание. На фиг. 2 показаны траектории движения ножа 7 (ЛИИ и BiBzBi - траектории крайних точек режущей кромки ножа без учета 15 поступательного движения режущего апнарата, AiAi и BiBi, с учетом поступательного движения). Положение АВ ножа соответствует началу рабочего хода. Концу рабочего хода соответствует положение ножа AzBz 20 (AzBz с учетом поступательного движения). При рабочем ходе ножа 7, поскольку угол 2 между векторами абсолютной (V) и нормальной к режущей кромке (Vn) скоростей больше О и меньше 90°, имеет место скользяший 25 срез стеблей. Например, для точки С режущей кромки в положении АВ ножа; для этого положения ножа мгновенным центром скоростей является точка Р. Расположение копира к направлению поступательного движения вы- зо бирается таким образом, чтобы к началу среза (положение стеблей и вплоть до конца рабочего хода направления вращательного и колебательного движения ножа совпадали. Только при таком движении ножа со- 35 храняется величина соотнощения касательной и нормальной составляющих скорости к режущей кромке, обеспечивая бесподборный срез стеблей при сравнительно малых скоростях, что имеет место при кошении ручной косой. В зависимости от свойства и состояния срезаемых стеблей, а также от условий работы аппарата возникает необходимость в изменепии кинематических .параметров ножа, в частности регулировки соотношения касательной и нормальной к режущей кромке составляющих скорости. Это осуществляется путем перестановки роликов на держателях ножей, имеющих отверстия для осей роликов. К концу рабочего хода траектории движения всех точек релсущей кромки ножа совпадают друг с другом (участок траектории движения ножа DE или DE с учетом поступательного движения аппарата на фиг. 2). На этом участке угол скольжения , т. е. на режущей кромке имеется только касательпая скорость (например, точка М с мгновенным центром скоростей Р на фиг. 2), что облегчает отброс срезанной массы. В фазе холостого хода (от конца и до начала процесса среза) -направление колебательного движения ножа противоположно вращательному, т е. на этом участке режущая кромка отодвигается от стерпи, что исключает ее срез. Формула изобретения Ротационный режущий аппарат, содержащий вертикальный вал с кривошипом, на концах которого щарнирно закреплены держатели ножей с роликами, ртличающийся тем, что, с целью уменьщения усилий резания, на валу установлен копир в виде диска с боковой цилиндрической поверхностью, контактирующей с роликами.
| название | год | авторы | номер документа |
|---|---|---|---|
| Режущий аппарат ротационного типа | 1973 |
|
SU452306A1 |
| Ротационный режущий аппарат | 1981 |
|
SU971157A1 |
| АВТОМАТ ДЛЯ РЕЗКИ ПЛАСТИЧНОГО БРУСА | 2015 |
|
RU2581434C1 |
| Установка для изучения резания стеблей сельскохозяйственных культур | 2017 |
|
RU2680005C2 |
| УСТРОЙСТВО ДЛЯ СКАШИВАНИЯ РАСТИТЕЛЬНОЙ МАССЫ С ОТКОСОВ КАНАЛА | 2004 |
|
RU2279204C2 |
| Активный делитель для жаток | 1958 |
|
SU117047A1 |
| ОПИСАНИЕ ИЗОБРЕТЕНИЯ | 1973 |
|
SU393987A1 |
| РЕЖУЩИЙ АППАРАТ РОТАЦИОННОГО ТИПА | 1973 |
|
SU363451A1 |
| Режущий аппарат косилки | 1982 |
|
SU1130237A1 |
| Жатка | 1988 |
|
SU1598904A1 |