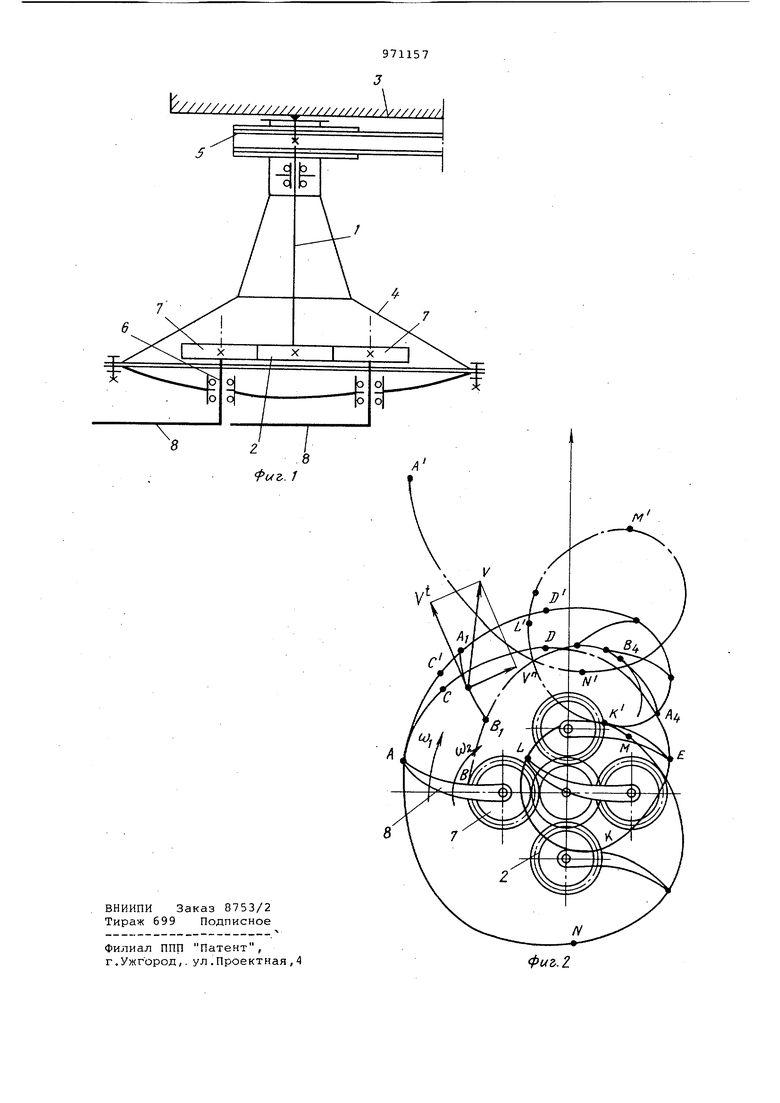
ром аппарата, получает вращение чере клиноременную передачу 5 от среднеоборотного гидромотора {не показан). На осях 6 сателлитов 7 закреплены режущие элементы 8, выполненные в виде кос, прямолинейная продольная ось основания косы в положении, перпендикулярном к направлению движения режущего аппарата, проходит через центры сателлита и центрального колеса.
Аппарат работает следующим образом.
При вращении ротора 4 с угловой скоростью u) сателлиты 7 планетарного механизма катятся по боковой поверхности центрального колеса 2 и вращазотся вокруг своих осей с угловой скоростью LOrj.
Так как держатели кос насажены на осях сателлитов 7, то косы совершают сложное вращательное движение.
За один оборот ротора сателлиты также совершают один оборот (пере-, даточное отношение планетарного механизма равно двум) . Нож-и же аппарата за один оборот ротора совершают два оборота относительно неподвижной оси 1.
Траектории движения точек режущей кромки ножа без учета поступательного перемещения аппарата ACDEKLMNA и с учетом поступательного перемещения А CDiEiKLMNA даны на фиг.2.
Положение ножей АГ соответствует началу, а положение концу рабочего хода.
Траектория режущей кромки или площадь, проходимая, режущей кромкой ножа за рабочий ход, ограничена линиями АА и 884.
Благодаря сложному движению ножа аппарата в процессе рабочего хода во всех точках режущей кромки отношение касательной составляющей скорости резания V к нормальной V сое тавляет больше 1,5-2,0, т.е. имеет место скользящий характер среза.
В процессе кошения срезанная масс от начала и до конца рабочего хода вместе с режущим элементом переносит ся в крайнее правое положение (точки А4, 84) и укладывается в валок.
у ротационного режущего аппарата принципиальная схема механизма привода ножа и размеры его звеньев выбраны, исходя из условий соблюдения закономерностей изменения коэффициента скольжения ножа ручной косы по длине режущей кромки ножа и в процессе рабочего хода. В процессе косьбы он от начала рабочего хода и до конца увеличивается. Так если в начале рабочего хода коэффициент скольжения у основания режущей кромк равен 1, а у кончика - 9, то в конце рабочего хода в зтих же точках его величины равны 7 и 16 соответственно.
Нож предлагаемого, аппарата в процессе рабо.чего хода почти полностью повторяет особенности движения ножа ручной косы и обеспечивает чистый срез стеблей.
Преимущество предложенного режущего аппарата по сравнению с известным заключается в том, что его рабочий орган, повторяя движение ручной косы, позволяет осуществить бесподпорный чистый срез тонкостебельных злаковых и трав при малых скоростях и энергетических затратах.
Формула изобретения
Ротационный режущий аппарат, содержащий привод, выполненный в виде простой планетарной передачи с установленными на сателлитах режущими элементами, отличающийся тем, что, с целью снижения энергоемкости процесса резания, режущий элемент выполнен в виде косы., а передаточное отношение планетарной передачи равно двум.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 546322, кл. А 01 D 55/18, 1977.
2.Шумаков М.М. Исследование планетарно-плосковращательного режущего аппарата для кошения газонов. Автореферат диссертации на соискание ученой степени кандидата технических наук. М., ВИСКОМ, 1976, с.12.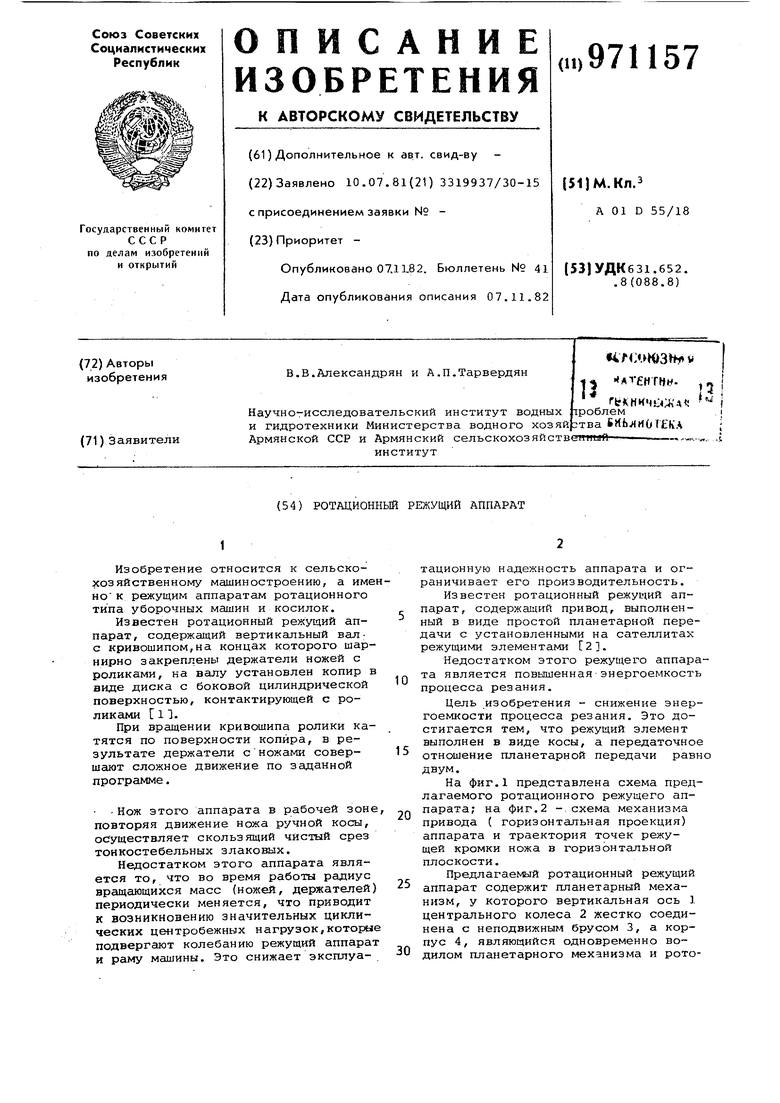
| название | год | авторы | номер документа |
|---|---|---|---|
| Ротационный режущий аппарат | 1975 |
|
SU546322A1 |
| Ротационный режущий аппарат | 1988 |
|
SU1644778A1 |
| Режущий аппарат ротационного типа | 1973 |
|
SU452306A1 |
| РОТАЦИОННЫЙ РАБОЧИЙ ОРГАН КОСИЛКИ | 2005 |
|
RU2309573C2 |
| МОТОКОСИЛКА | 1992 |
|
RU2050096C1 |
| Сегментный режущий аппарат | 1987 |
|
SU1442114A1 |
| РУЧНАЯ КОСА | 2011 |
|
RU2497340C2 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ РЫБНОГО ФИЛЕ НА ЛОМТИКИ | 2023 |
|
RU2807633C1 |
| РОТОРНЫЙ СТАНОК РЕЗКИ ПОРОХОВЫХ ШНУРОВ | 2018 |
|
RU2692387C1 |
| Устройство для обрезки торцов тонкостенных труб | 1980 |
|
SU963724A1 |