Изобретение относится к области измерения весового количества жидкости путем ввода коррекции по плотности в показания объемного датчика количества жидкости.
Известны счетчики весовото количества жидкости, содержащие датчик объемного количества, датчик плотности с поплавковой камерой и вариатор скорости, связанные подвижными штоками и чувствительными упругими эле.ментами (1-3).
Эти устройства из-за сложной кинематической связи не обеспечивают пеобходимую точность и надежность измерения.
Известен также счетчик весового количества жидкости (4), состоящий из поплавкового датчика плотности, связанного рычатом через тарированную -пружину с вариатором скорости, расположеиного в поплавковой камере.
Недостатком этого счетчика является недостаточная подъемная сила поплавка при малых изменениях плотности, что приводит к недостаточному управлению вариатором, ограниченному диапазону изменения плотности, наличию добавочной погрешности от засмолива«ия опор датчика плотности.
Известно также устройство для измерения весового количества жидкости (5), содержащее объемный измеритель количества, поплавковый датчик плотности, расположенный в поплавковой камере, связанный ходовым винтом со счетным механизмом. Установка груза на ходовом винте в соответствии с определенной величиной плотности производится вручную. Для обеспечения автоматизации ввода коррекции по плотности, т. е. повышения точности измерения, надежности работы счетчика и расширения диапазона измерения по плотности контролируемых сред в предлагаемом счетчике Б кинематическую цепь, связывающую объемный датчик и датчик плотности с вариатором скорости, введен реверсивный механизм, ведущее звено которого постоянно кинематпчески связано с объемным датчиком, а ведомое звено кинематически связано с вариатором скорости и жестко связано с датчиком плотности. При этом жесткая связь датчика плотности с ведомым звеном реверсивного механизма выпол-нена в виде расположенного во втулке рычага с винтовым участком, на котором установлена тайка с выступами, входящими в щлицевые пазы втулки, причем втулка жестко соединена с ведомым звеном,
а рычаг связан с осью поворота ведомого звена реверсивного механизма.
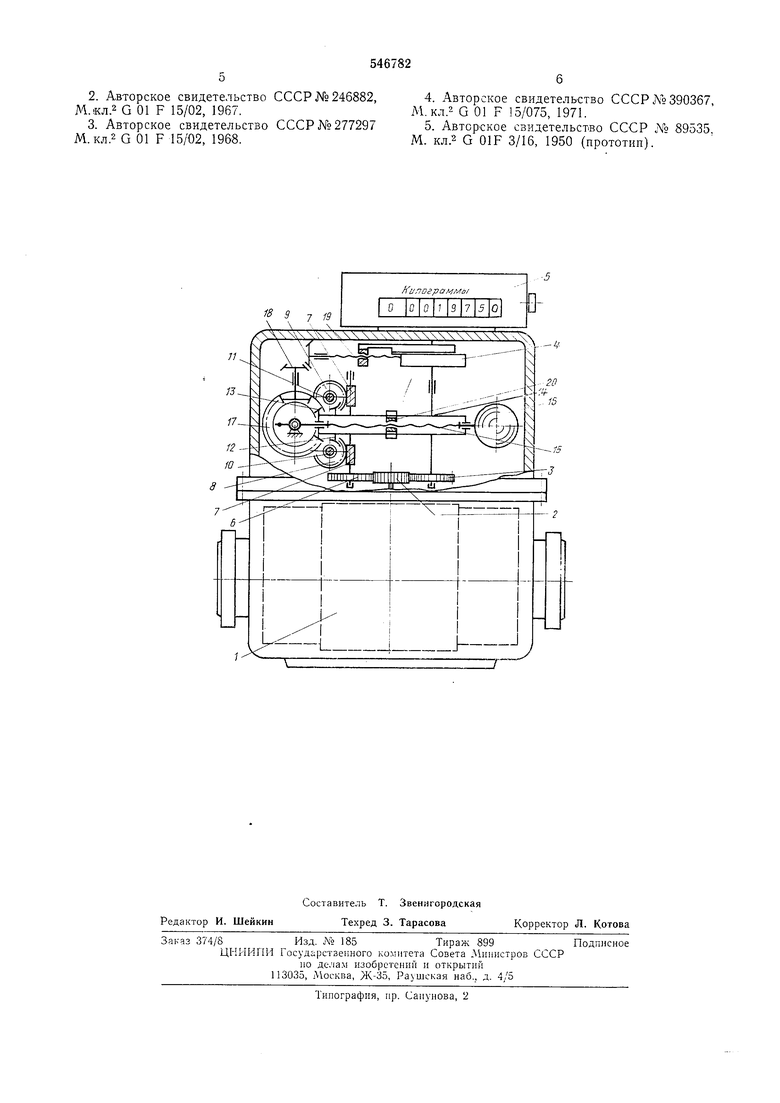
На чертеже представлена схема описываемого счетчика. Счетчик состоит из корпуса с рабочим оргаком (объемным датчиком) 1, который через
зубчатые колеса 2 и 3 связан с вариатором скорости 4 и счетным механизмом 5.
Одновременно объемный датчик 1 lepes зубчатые колеса 2 и 6 и червяк 7 с червячными колесами 8 и 9 связан с двумя одинаковыми червяками 10 и 11, которые являются ведущим звеном реверсивного механизма. Между червяками 10 и II расположено ведомое звено реверсивного механизма в виде червячного колеса 12, которое входит в зацепление Либо с червяком 10, либо с червяком 11, либо остается в промежуточном положении.
Червячное колесо 12 жестко связано с конической шестерней 13 и закреплено на втулке 14, в опорах которой установлен рычаг 15 поплавка 16 датчика плотности. Шестерня 13 находится постоянно в зацеплении с колесом 17, ось которого одновременно является осью поворота рычага 15. Колесо 17 через систему зубчатых передач 18 связано с вариатором 4 с ПОМОЩЬЮ винтовой пары 19. Средняя часть р 1чата 15 выполнена в виде винта с гайкой 20, наружная поверхность которой имеет выступы, расположенные в шлицевых пазах втулки 14. При прохождении измеряемой жидкости через счетчик рабочий орган 1 зубчатым колесом 2 с одной стороны через колесо 3 и вариатор скорости 4 постоянно приводит в действие счетный механизм 5. С другой стороны колесо 2 через колесо 6 вращает червяки 7, приводящие во вращение червячные колеса 8 и 9 вместе с червяками 10 и 11, в одном и том же направлении и с одинаковой скоростью.
Если плотность измеряемой жидкости соответствует исходной плотности, на которую оттарирован (настроен) счетчик, то рычаг 15 занимает тфомежуточное положение, как показано на чертеже. В этом положении червяки 10 и 11 «е находятся в зацеплении с червячным колесом 12 и не приводят его во вращение. При каждом изменении плотности (увеличении или уменьшении) поплавок 16 датчика плотности соответственно (поднимается или опускается), поворачиваясь вокруг оси колеса Г/, вводит в зацепление червячное колесо 12 с червяком (11 или 10).
Вращение колеса 12 передается через коНическую щестерню 13 колесу 17 и далее через зубчатые зацепления 18 винтовой паре 19, осуществляющей управление вариатором 4.
(При этом втулка 14, вращаясь вместе с колесом 12, вращает тайку 20, которая перемещается (вправо или влево) по рычагу 15. При этом изменяется положение центра тяжести рычага до уравновешивания датчика плотности, т. е. до тех пор, пока произведение подъемной силы поплавка датчика плотности на расстояние от центра поплавка до точки поворота рычага (ось колеса 17) «е станет равным произведению силы тяжести датчика плотности на расстояние от центра тяжести до той же оси поворота рычага. При этом поплавок вернется (опустится или поднимется) в нервоначальное, промежуточное положение,
и щестерня 12 выйдет из зацепления с червяками 11 или 10, а линейное перемещение на вариатор прекратится в положении с необходимым передаточным отнощением вариатора
для данной плотности жидкости.
Таким образом, каждое положение гайки соответствует определенному значению передаточного числа вариатора, обусловленного значением фактической плотности жидкости.
Из описания принцнпа действия видно, что датчик плотности после каждого изменения плотнОСти приходит в свое исходное положение, т. е. величина его хода не завпспт от диапазопа изменения плотности, который может
быть предельно щироким.
Силовое управление вариатором за счет энергии рабочего органа позволяет датчику плотности при небольщих габаритах реагировать на самые незначительные изменения
плотности, что повыщает точность измерения. Засмоливание опор датчика плотности и вариатора, сопротивление управления вариатором и другие тормозящие силы «е влияют на точность и работоспособность счетчнка в силу использования энергии рабочего органа, величина которой несоизмеримо .велика по Сравнению с суммарным моментом сопротигления.
Форм у
изобретения
л а
1.Счетчик весового количества жидкости, содержащий объемный датчик, датчик плотности, выполненный в виде поплавка, размещенного в поплавковой камере, сообщающейся с измерительным участком трубопровода, вариатор скорости, кинематически связанный с объемным датчиком и датчиком плотности,
и счетный механизм, отличающийся тем, что, с целью повыщения точности измерения, надежности работы счетчика и расщирения диапазона измерения по плотности контролируемых сред, в кинематическую цепь, овязывающую объемный датчик и датчик плотности с вариатором скорости, введен реверсивный механизм, ведущее звено которого 7тостоянно кинематически связано с объемным датчиком, а ведомое звено кинематически связано с вариатором скорости и жестко связано с датчиком плотности.
2.Счетчик по П. 1, отличающийся тем, что л есткая связь датчика плотности с ведомым звеном реверсивного механизма выполпена в виде расположенного во втулке рычага с винтовым участком, на котором установлена гайка с выступами, входящими в шлицевые пазы втулки, причем втулка жестко соединена с ведомым звеном, а рычаг связан с осью поворота ведомого звена реверсивного механизма.
Источники инф,ормации, принятые во внимание при экспертизе:
1. Авторское свидетельство СССР №233263,
М. КЛ.2 G01 F 15/02, 1967.
2.Авторское свидетельство СССР № 246882, М.КЛ.2 G 01 F 15/02, 1967.
3.Авторское свидетельство СССР №277297 М. КЛ.2 G 01 F 15/02, 1968.
4.Авторское свидетельство СССР jYo 390367, М. КЛ.2 G 01 F 15/075, 1971.
5.Авторское свидетельство СССР 89535 М. кл G OIF 3/16, 1950 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ВЕСОВОЙ КОРРЕКТОР К ОБЪЕМНЫМ СЧЕТЧИКАМ ЖИДКОСТИ | 1970 |
|
SU277297A1 |
| СЧЕТЧИК ВЕСОВОГО КОЛИЧЕСТВА ЖИДКОСТИ | 1973 |
|
SU390367A1 |
| АВТОМАТИЧЕСКИЙ ВЕСОВОЙ КОРРЕКТОР К ОБЪЕМНЫМ СЧЕТЧИКАМ ЖИДКОСТИ | 1973 |
|
SU362993A1 |
| Ткацкий станок | 1989 |
|
SU1705432A2 |
| ВЕСОВОЕ ПЕРЕСЧЕТНОЕ УСТРОЙСТВО К ОБЪЕМНЫМ ЖИДКОСТНЫМ СЧЕТЧИКАМ | 1969 |
|
SU233233A1 |
| Реверсивный счетчик жидкости | 1972 |
|
SU441450A1 |
| ИМПУЛЬСНЫЙ МЕХАНИЧЕСКИЙ ВАРИАТОР | 1991 |
|
RU2011075C1 |
| Основный регулятор ткацкого станка | 1981 |
|
SU1326667A1 |
| Шестеренчатый насос | 1977 |
|
SU709834A1 |
| Механизм регулируемого эксцентрикового узла | 1989 |
|
SU1700294A1 |
