Целью изобретения является повышение надежности выработки перчатки, а также сокращение протяженности вяжущих систем и расширение рисунчатых возможностей.
Это достигается тем, что в перчаточном двухфонтурном плоскофанговом автомате, содержащем иглы, шарнирно сочлененные с игловодами, имеющими пятки, механизмы управления игловодами и платииами, заключающую каретку с линейками заходов, вял ущую каретку с двумя досками, каждая из которых имеет подъемные клинья, нижние и верхние средники и расположенные по разные стороны от вертикальной оси симметрии доски, кулирный клин и управляемое средство перемещения игл для кулирования и перевода петель с первой на вторую отбойную линию линеек заходов, и программное устройство, управляемое средство перемещения игл для кулирования и перевода петель с первой на вторую отбойную линию линеек заходов каждой доски выполнено в виде трапециевидного клина, боковая рабочая кромка которого обращена к боковой рабочей кромке расположенного под ним подъемного клина, при этом трапециевидный клин установлен на доске с возможностью перемещения вдоль боковой рабочей кромки подъемного клина в два положения, одно из которых соответствует моменту перевода петель с первой на вторую отбойную линию, а другое - кулированию, каждый нижний средник установлен с возможностью утапливания относительно доски, причем автомат снабжен кинематически связанными с программным устройством механизмами утапл.иваиия нижних средников.
Каждый нижний средник установлен с возможностью утапливания относительно доски наполовину, а каждый механизм управления игловодами содержит устройство для трехпозиционного отбора игл.
Автомат может иметь иглы с пятками, а трапециевидный клин одной доски и кулирный клин другой могут быть расположены выще верхних средников в зоне перемещения пяток игл.
Трапециевидный клин каждой доски может быть расположен в зоне перемещения пяток игловодов и примыкать к соответствующему верхнему среднику.
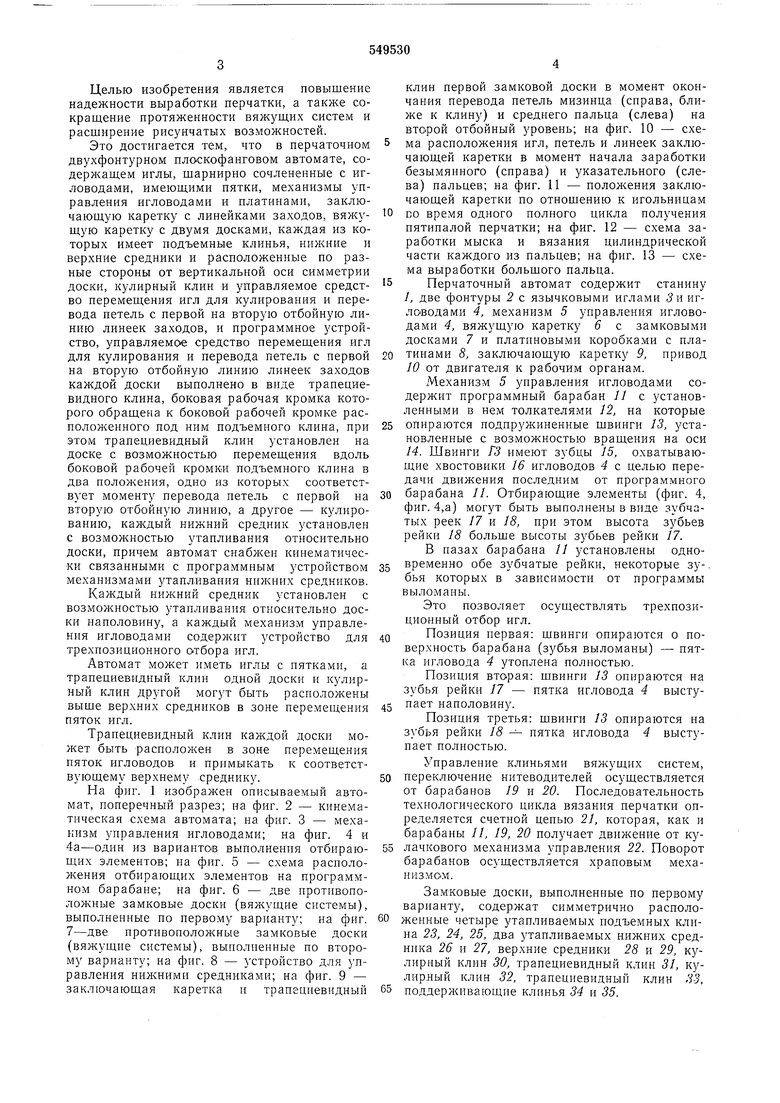
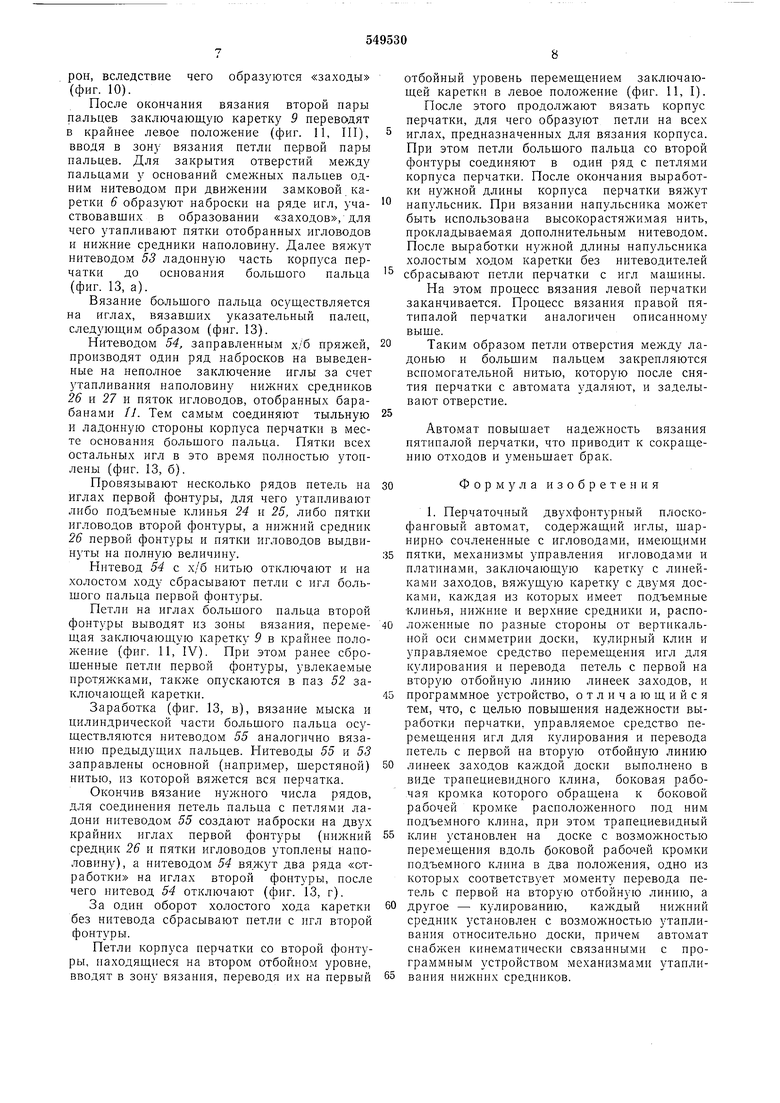
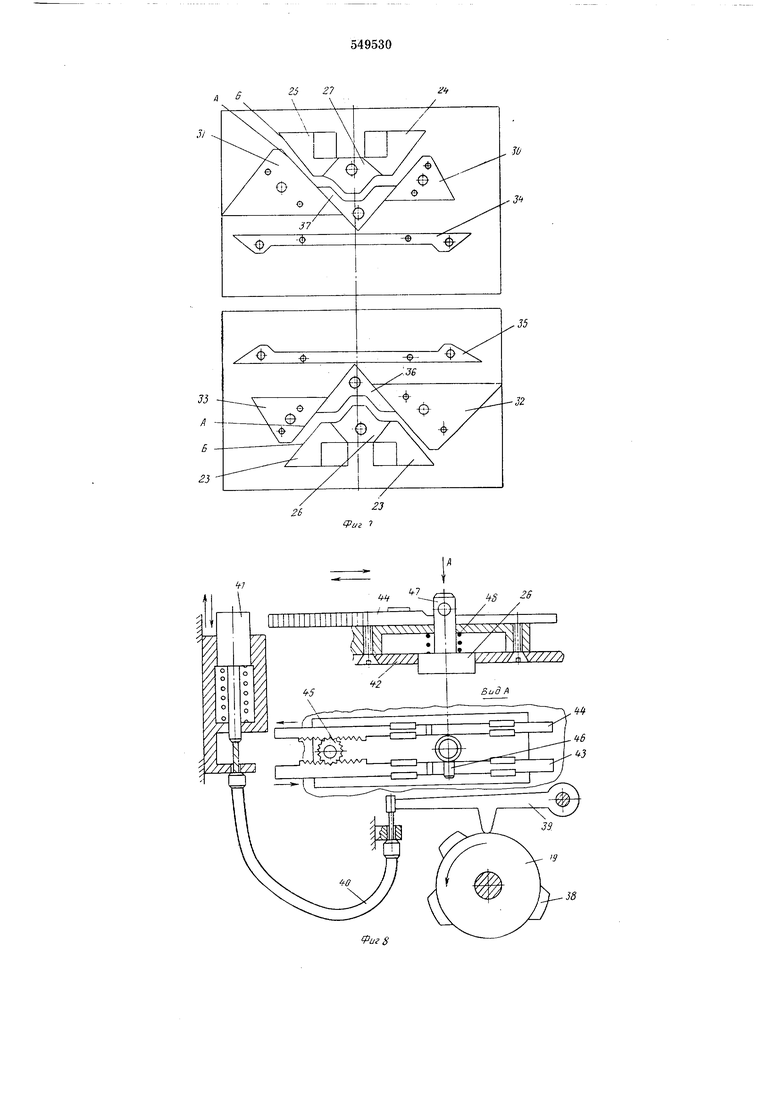
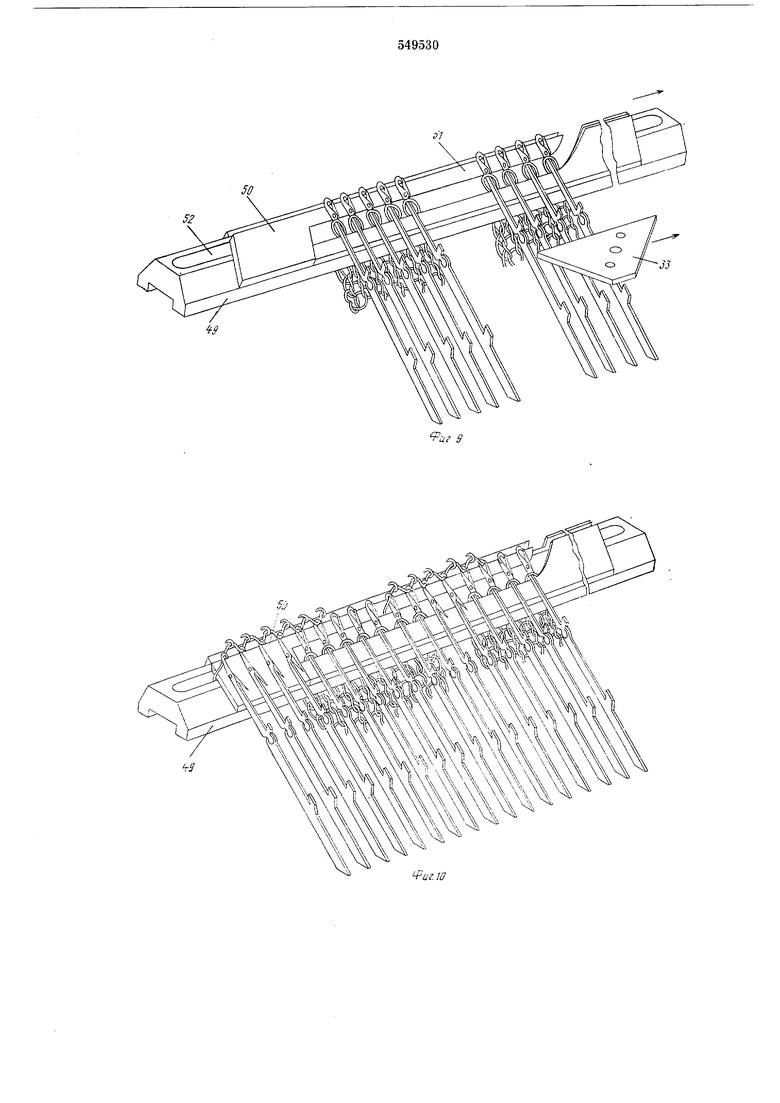
На фиг. 1 изображен описываел1ый автомат, поперечный разрез; на фиг. 2 - кинематическая схема автомата; на фиг. 3 - механизм управления игловодами; на фиг. 4 и 4а-один из вариантов выполнения отбирающих элементов; на фиг. 5 - схема расположения отбирающих элементов на программном барабане; на фиг. 6 - две противоположные замковые доски ( системы), выполненные по первому варианту; на фиг. 7-две противоположные замковые доски (вяжущие системы), выполненные по второму варианту; на фиг. 8 - устройство для управления нижними средниками; на фиг. 9 - заключающая каретка и трапециевидный
клин первой замковой доски в момент окончания перевода петель мизинца (справа, ближе к клину) и среднего пальца (слева) на второй отбойный уровень; на фиг. 10 - схема расположения игл, петель и линеек заключающей каретки в момент начала заработки безымянного (справа) и указательного (слева) пальцев; на фиг. 11 - положения заключающей каретки по отношению к игольницам
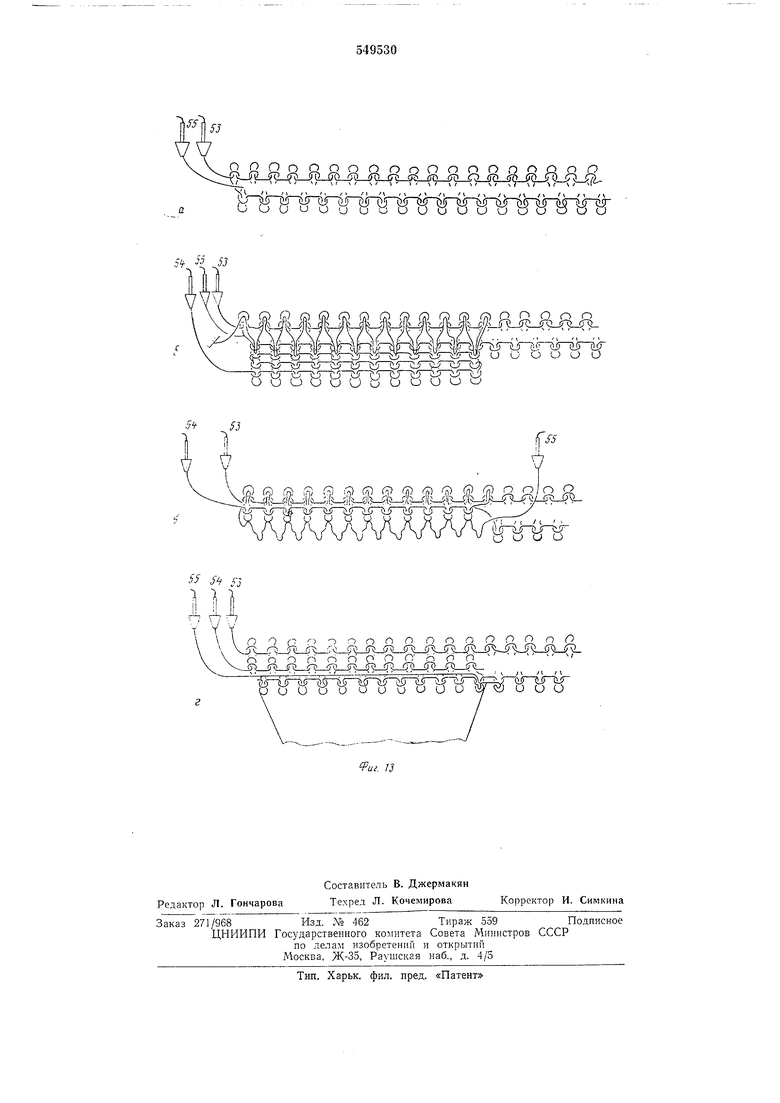
со время одного полного цикла получения пятипалой перчатки; иа фиг. 12 - схема заработки мыска и вязания цилиндрической части каждого из пальцев; на фиг. 13 - схема выработки больщого пальца.
Перчаточный автомат содержит станину J, две фонтуры 2 с язычковыми иглами 5 и игловодами 4, механизм 5 управления игловодами 4, каретку 6 с замковыми досками 7 и платиновыми коробками с платинами 8, заключающую каретку 9, привод 10 от двигателя к рабочим органам.
Механизм 5 управления игловодами содержит программный барабан // с установленными в нем толкателями 12, иа которые
опираются подпружиненные щвпнги 13, установленные с возможностью вращения на оси 14. Швинги ГЗ имеют зубцы }5, охватывающие хвостовики 16 игловодов 4 с целью передачи движения последним от программного
барабана У/. Отбирающие элементы (фиг. 4, фиг. 4,а) могут быть выполнены в виде зубчатых реек 17 и 18, при этом высота зубьев рейки 18 больше высоты зубьев рейки 17. В пазах барабана 11 установлены одновременно обе зубчатые рейки, некоторые зу-. бья которых в зависимости от программы выломаны.
Это позволяет осуществлять трехпозиционный отбор игл.
Позиция первая: щвинги опираются о поверхность барабана (зубья выломаны) - пятка игловода 4 утоплена полностью.
Позиция вторая: щвингп 13 опираются на зубья рейки 17 - пятка игловода 4 выступает наполовину.
Позиция третья: щвинги 13 опираются на зубья рейки 18 - пятка игловода 4 выступает полностью.
Управление клиньями систем,
переключение нитеводителей осуществляется от барабанов 19 и 20. Последовательность технологического цикла вязания перчатки определяется счетной цепью 21, которая, как и барабаны II, 19, 20 получает движение от кулачкового механизма управления 22. Поворот барабанов осуществляется храповым механизмом.
Замковые доски, выполненные по первому варианту, содержат симметрично расположенные четыре утапливаемых подъемных клина 23, 24, 25, два утапливаемых нижних средника 26 и 27, верхние средники 28 и 29, кулирный клин 30, трапециевидный клин 31, кулирный клин 32, трапециевидный клин 33,
поддерлашающие клинья 34 и 35.
Боковые рабочие кромки А трапециевидных клиньев 31 и 33 обращены к боковым рабочим кромкам Б соответствующих подъемных клиньев 25 и 23.
Клинья 30, 33, 34 и 35 взаимодействуют только с пятками язычковых игл 3, остальные клинья - только с пятками игловодов 4.
Замковые доски, выполненные по второму варианту, содержат ту же совокупность клиньев, но в отличие от первого варианта кулирный клин 30 и клин 33 расположены в зоне перемещения пяток игловодов 4 и смонтированы с возможностью перемещения вдоль одной из граней (кромок) соответственно верхних средников 36 и 57.
Управление клиньями, в частности нижними средниками 26 и 27, осуществляется следующим образом. Движение от барабана /Р с накладками 38 передается установленным на оси вращения рычагам 39, которые через гибкие тросы 40 управляют командными пальцами 41. На вяжущей каретке, под замковыми досками 42, относительно которых должны двигаться нижние средники 26 (или 27), установлены ползуны 43 и 44, связанные между собой зубчатым колесом 45. Верхняя грань ползуна 43 выполнена ступенчатой и находится в постоянном контакте с пальцем 46 опорного стержня 47 средника 26 (или 27) за счет иружины сжатия 48. При иодходе каретки к крайнему положению, ползун 43 либо ползун 44 наталкиваются на один из выступающих командных пальцев 41, вследствие чего ползуны перемещаются и за счет ступенчатой поверхности переводят нижние средники в требуемое положение.
Для вывода ряда петель, например, первой пары пальцев (мизинца и среднего) перед началом вязания второй пары пальцев (безымянного и указательного), из зоны вязания в автомате используется заключающая каретка, состоящая из корпуса 49 с прикрепленными к нему с обеих сто.рон линейками заходов 50 с фигурным пазом 51. Линейки 50 могут быть выполнены как цельными, т. е. из одной пластины, так и составными, что облегчает их изготовление, но не влияет на технологию вязания (на фиг. 9 показаны составные линейки). Корпус 49 каретки вдоль всей длины имеет продольный паз 52, в который проходит вырабатываемое изделие. Перемещение заключающей каретки осуществляется за счет кинематической связи с вяжущей кареткой 6. Кинематическая связь осуществляется при помощи уиравляемого от программного барабана 19 устройства, аналогичного устройствам для перемещения нитеводителей.
Заключающая каретка 9 во время одного полного цикла перемещается четыре раза из одного крайнего положения в другое (фиг. 11).
В положении I заключающая каретка 9 расположена относительно неподвижной фонтуры 2 при вязании первой пари пальцев и ири довязывании ладони и напульсника.
В положении П каретка расположена относительно фонтуры 2 при выводе петель последнего ряда первой пары пальцев из зоны вяз-ания, т. е. при переводе петель на второй отбойный уровень, а также при вязании второй пары пальцев.
В положении П1 каретка 9 расположена
относительно фонтуры 2 при вводе петель последнего ряда первой пары пальцев в зону вязания, а также при вязании корпуса перчатки (ладонной части до больщого пальца). В положении IV каретка 9 расположеиа
5 относительно фонтуры при выводе из зоны вязания последнего ряда петель ладони до большого пальца, а также при вязании больщого пальца.
В механизмы утапливания нижних сред0 НИКОВ входят рычаги 39, тросы 40, пальцы 41, ползуны 43, 44.
При вязании левой пятипалой перчатки с заходами автомат работает следующим образом.
5Вязание перчатки начинается с концов
двух пальцев (фиг. 12), т. е. осуществляют самозаработку изделия, прокладывая нити на иглы обеих фонтур, отобранные барабанами 11 и соответствующие заправочной щирине
пальца (фиг. 12, а). При прокладывании первого ряда все клинья выступают на полную величину из замковой доски. Затем выключают с левой и правой стороны зоны вязания двух игольииц, например по три иглы, провязывают ряд кулирной глади на первой фоитуре (фиг. 12,6), выводят крайнюю иглу второй фонтуры на неполное заключение, прокладывают на нее нить и провязывают ряд кулирной глади на второй фонтуре (фиг.
0 12, в). Прокладывание нити на крайнюю иглу осуществляют для получения равиомерно закругленной части мыска, для чего утапливают нижний средник в пятку крайнего игловода наполовину. Последовательно ирибав5 ляя иглы с обеих сторон, довязывают мысок и вяжут цилиндрическую часть пальца (фиг. 12, г, д, е, ж).
После окончания вязания мизинца выключают соответствующий иитеводитель барабаном 19, а иглы - барабаном 11 и довязывают средний палец до требуемой длины. Далее заводят петли мизинца и среднего пальца на второ.й отбойный уровень, т. е. в
55 фигурный паз 51, для чего переводят клинья 33 и 31 в крайнее нижнее положение барабаном управления 20 и синхронно перемещают вяжущую 6 и заключающую 9 каретки в крайнее положение (фиг. 11, П). При этом
0 положении заключающей каретки 9 производится заработка и вязание второй пары пальцев аналогично заработке и вязанию первой пары пальцев. При вязании второй пары пальцев в работе участвуют крайние иглы
65 пальцев первой пары с одиой или обеих сторон, вследствие чего образуются «заходы (фиг. 10).
После окончания вязания второй пары пальцев заключающую каретку 9 переводят в крайиее левое положение (фиг. 11, III), вводя в зону вязания петли первой пары пальцев. Для закрытия отверстий между пальцами у осиований смеж;ных пальцев одиим нитеводом при движении замковой каретки 6 образуют наброски ца ряде игл, участвовавших в образоваиии «заходов, для чего утапливают пятки отобранных игловодов и иижние средники наполовину. Далее вяжут нитеводом 53 ладонную часть корпуса перчатки до основания большого пальца (фиг. 13, а).
Вязание большого пальца осуществляется на иглах, вязавших указательный палец, следующим образом (фиг. 13).
Нитеводом 54, заправленным х/б пряжей, производят один ряд иабросков на выведенные на неполное заключение иглы за счет утапливаиия наполовину нижних средников 26 и 27 и пяток игловодов, отобранных барабанами //. Тем самым соединяют тыльную и ладонную стороны корпуса перчатки в месте основания большого пальца. Пятки всех остальных игл в это время полностью утоплены (фиг. 13, б).
Провязывают несколько рядов петель иа иглах первой фо«туры, для чего утапливают либо подъемные клинья 24 и 25, либо пятки игловодов второй фонтуры, а средник 26 первой фонтуры и пятки игловодов выдвинуты на полн)ао величину.
Нитевод 54 с х/б нитью отключают и на холостом ходу сбрасывают петли с игл большого пальца первой фоитуры.
Петли на иглах большого пальца второй фонтуры выводят из зоны вязания, перемещая заключающую каретку 9 в крайнее полол ение (фиг. 11, IV). При этом ранее сброшенные петли первой фонтуры, увлекаемые протяжками, также опускаются в паз 52 заключающей каретки.
Заработка (фиг. 13, в), вязание мыска и цилиндрической части большого пальца осуществляются нитеводом 55 аналогично вязанию предыдущих пальцев. Нитеводы 55 и 53 заправлены основной (например, щерстяной) нитью, из которой вяжется вся иерчатка.
Окончив вязание нужного числа рядов, для соединения петель пальца с петлями ладони нитеводом 55 создают наброски на двух крайних иглах первой фонтуры (нижний средник 26 и пятки игловодов утоплены наполовину), а нитеводом 54 вяжут два ряда «отработки на иглах второй фоитуры, после чего нитевод 54 отключают (фиг. 13, г).
За один оборот холостого хода каретки без нитевода сбрасывают петли с игл второй фонтуры.
Петли корпуса иерчатки со второй фонтуры, находящиеся на втором отбойном уровне, вводят в зону вязания, переводя их на первый
отбойный уровень перемещением заключающей каретки в левое положение (фиг. И, I). После этого продолжают вязать корпус перчатки, для чего образуют петли на всех
иглах, предназначенных для вязания корпуса. При этом петли большого пальца со второй фонтуры соединяют в один ряд с петлями корпуса перчатки. После окончания выработки нужной длины корпуса перчатки вяжут
напульсник. При вязании наиульсника может быть использована высокорастяжимая нить, прокладываемая дополнительным нитеводом. После выработки иужной длины наиульсника холостым ходом каретки без нитеводителей
сбрасывают петли перчатки с игл машины.
На этом процесс вязания левой перчатки
заканчивается. Процесс вязания правой пятииалой перчатки аналогичен оиисаиному
выще.
Таким образом петли отверстия между ладонью и большим пальцем закрепляются всиомогательной нитью, которую после снятия иерчатки с автомата удаляют, и заделывают отверстие.
Автомат новыщает надежность вязания пятипалой перчатки, что приводит к сокращению отходов и уменьшает брак.
Формула изобретения
1. Перчаточный двухфонтурный плоскофанговый автомат, содержащий иглы, шарнирно сочлененные с игловодами, имеющими
пятки, механизмы управления игловодами и платинами, заключающую каретку с линейками заходов, вяжущую каретку с двумя досками, каждая из которых имеет подъемные клинья, нижние и верхние средники и, расположеииые по разные стороны от вертикальной оси симметрии доски, кулирный клин и управляемое средство перемещения игл для кулирования и перевода петель с первой на вторую отбойиую линию линеек заходов, и
программное устройство, отличающийся тем, что, с целью повышения надел ности выработки перчатки, управляемое средство перемещения игл для кулирования и иеревода петель с первой на вторую отбойную линию
линеек заходов каждой доски выполнено в виде транециевидного клина, боковая рабочая кромка которого обращена к боковой рабочей кромке расположенного под ним иодъемного клина, при этом траиециевидиый
клин установлен на доске с возможностью перемещения вдоль боковой рабочей кромки подъемного клина в два положения, одно из которых соответствует моменту перевода нетель с первой на вторую отбойную линию, а
другое - кулированию, каждый нижний средник установлен с возможностью утапливания относительно доски, причем автомат снабжен кинематически связанными с программным устройством механизмами утанливания нижних средников.
2.Автомат по п. 1, отличающийся тем, что каждый нижний средник установлен с возможностью утапливания относительно доски наполовину, а каждый механизм управления игловодами содержит устройство для трехпозиционного отбора игл.
3.Автомат по п. 1, отличающийся тем, что иглы имеют пятки, а трапециевидный клин одной доски и кулирный клин другой расположены выще верхних средников в зоне перемещения пяток игл.
4.Автомат по п. 1, отличающийся тем, что трапециевидный клин каждой доски
расположен в зоне перемещения пяток игловодов и примыкает к соответствующему верхнему среднику.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР N° 203131, D 04 В 7/34, 1968 г.
2.Цитович И. Г. и др. «Новая технология и оборудование для изготовления перчаточных изделий. Обзор ЦНИИТЭИлегпром, Москва, 1974, с. 30-39.


| название | год | авторы | номер документа |
|---|---|---|---|
| Перчаточный автомат | 1987 |
|
SU1498846A1 |
| Плоскофанговый автомат | 1976 |
|
SU662636A1 |
| Приводная заключающая каретка перчаточного автомата | 1975 |
|
SU534534A1 |
| Механизм вязания двухцилиндровой кругловязальной машины | 1987 |
|
SU1490180A1 |
| Механизм вязания двухцилиндровой вязальной машины | 1980 |
|
SU1033600A1 |
| ПЛОСКОФАНГОВЫЙ АВТОМАТ | 1967 |
|
SU203131A1 |
| Двухцилиндровая кругловязальная машина | 1984 |
|
SU1234474A1 |
| Приставка к замку плосковязальной машины для вязания плюшевого трикотажа | 1988 |
|
SU1534114A1 |
| Кулинарный клин замка перчаточного автомата | 1977 |
|
SU681130A1 |
| Механизм вязания двухцилиндровой кругловязальной машины | 1982 |
|
SU1117353A1 |




пллтилп
2}
it
««
fPui 8 mmiimm
/
л
У
ж
,: ,,.Р.IIIIII .
и (jr cjrij U Vy и u и и и
n n n Г) n n n (7 rO о о о г;: f
ППППППППОПО OOOOOCviOOOO O
(vj c j-2j5 iy ( (JUUUUOUUUU
л (TO it
Ь Т5 -5 С5 5 Т5 5 С ГТ5 Т:ГТ5
иииииоиииии
Г
П о П о о n о , СТ 77 g7 Ci о
Я Q Q
лИЯйДДР ООППОО О LJ;y tLjfCLjnL L(
J i5 lii) (iji (Ml
b и и и о и a
00 QSi 00 05 СГ
ооУоУои
Сл) (fv Q Q Q Q ф (л) - . cfij ;li5jLJVJUlu l
jriyrtir jni n№3r-iyr- |jri: niriL5(Й- ч Г «-- г--гз-) о и
. )
е БТЗШПППГ в
я , . fro 7 (ГО СП (r(j (J( (Ki (Я
h Г) h о Г) О П Г; Н ri о
(П1Г7| ГТ70 Г |Т п1ТО(Т7|ГОСГ
iTHifrinf infirt i
liJ inLjJp-jr - -- ) о
if с
0(
о u о о
ООГ)Г ОПГ/Г Г)ОО(О
