1
Изобретение относится к области автоматизации процессов измельчения сыпучих продуктов, преимущественно зерна, и предназначено для использования в мукомольно-крупяной и комбикормовой отраслях промышленности.
Известен мукомольный вальцовой станок для размола зерна и промежуточных продуктов его переработки -1.
Это устройство включает в свой состав вращающиеся в противоположные стороны с различной скоростью вальцы, ковщ с выпускной задвижкой для регулирования производительности, датчик уровня продукта и ряд других элементов и приспособлений.
Недостаток известного станка заключается в отсутствии возможности дистанционного управления перемещением мелющих вальцев.
Известен также другой вальцовой станок 2, который содержит, в частности, мелющие вальцы, блок сближения и разведения вальцов, снабженный электромагнитным приводом, переключатель, приводной механизм которого системой соединительных рычагов функционально связан с датчиком наличия продукта, блок местного управления с замыкающим звеном.
Последнее из указанных выше устройств является наиболее близким к изобретению.
Недостаток известного устройства обусловлен наличием электрической связи между используемым электромагнитным приводом и блоком местного управления. Данная связь
существенно усложняет конструкцию станка и порождает его взрывоопасность.
Целью изобретения является упрощение вальцового станка и повыщение надежности его работы.
Поставленная цель достигается тем, что в устройстве блок местного управления выполнен в виде ручного эксцентрикового механизма, а замыкающее звено - в виде одного из соединительных рычагов, кинематически связанного с приводным механизмом переключателя, который электрически соединен с электромагнитным приводом блока сближения и разведения вальцов.
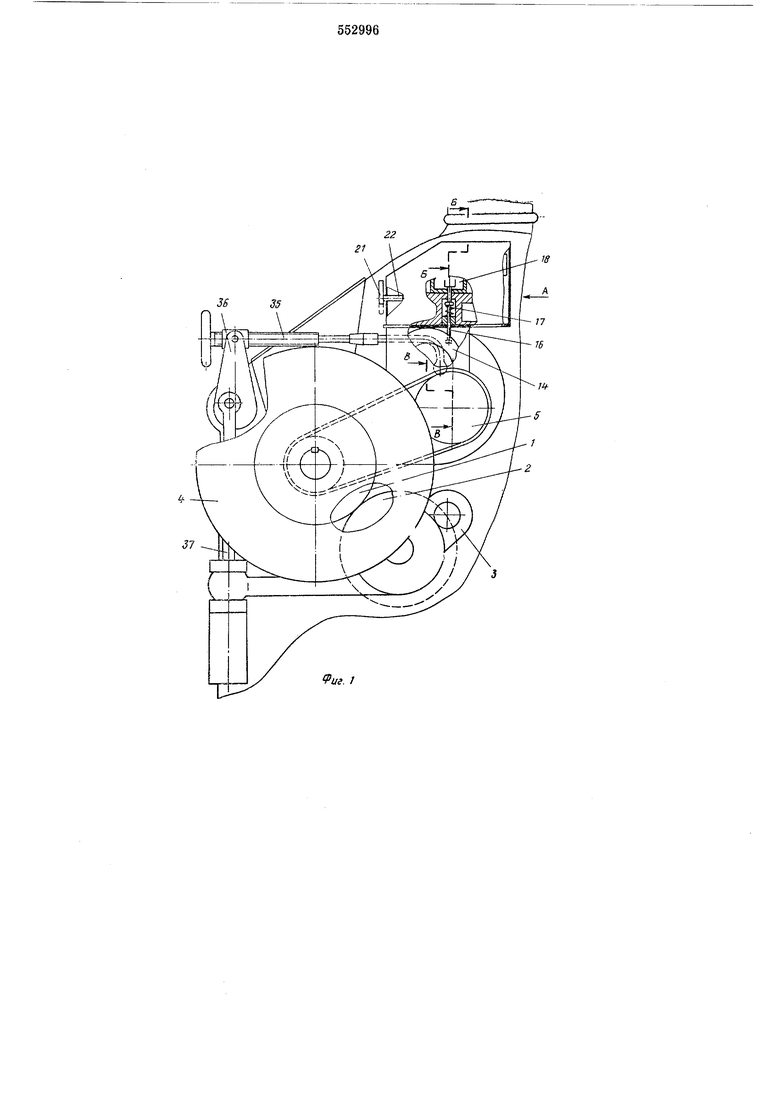
На фиг. 1 изображен предложенный вальцовый станок; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3-разрез ino Б-Б на фиг. 1; на фиг. 4-разрез по В-В на фиг. I; на фиг. 5-разрез по Г-Г на фиг. 2; на фиг. 6-
разрез по Д-Д на фиг. 4.
Рабочими органами станка являются мелющие вальцы 1, 2 (фиг. 1), причем последний заключен в подвижные подшипниковые опоры 3.
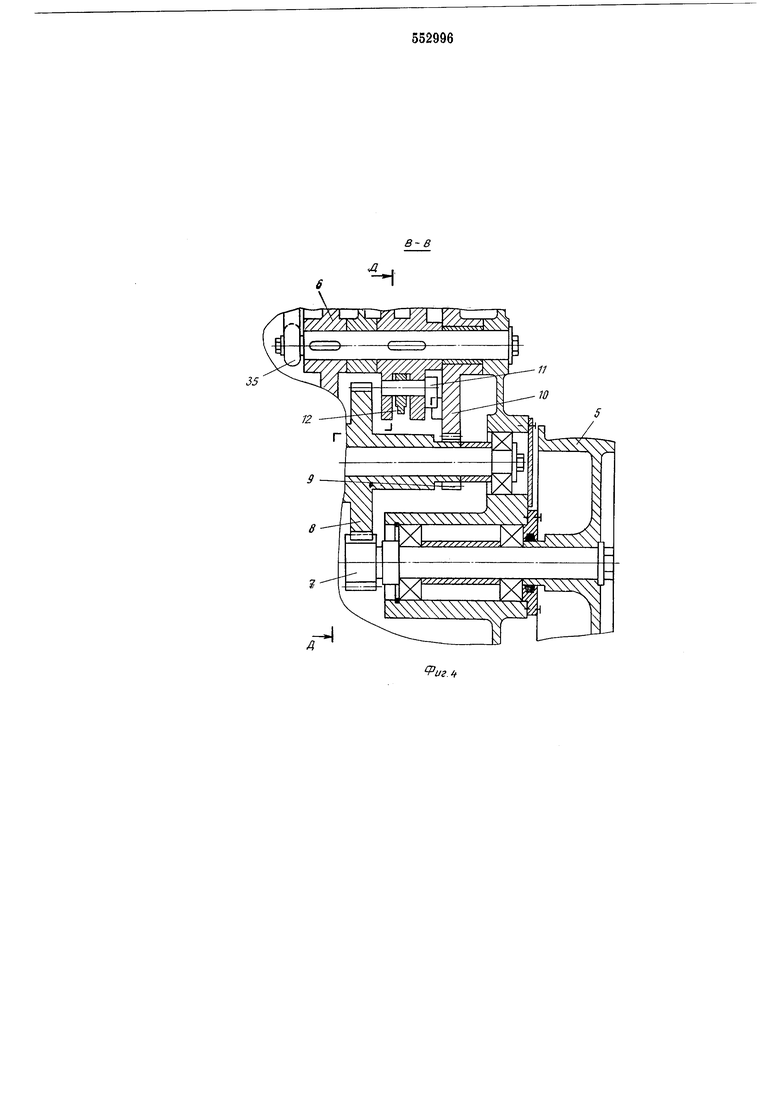
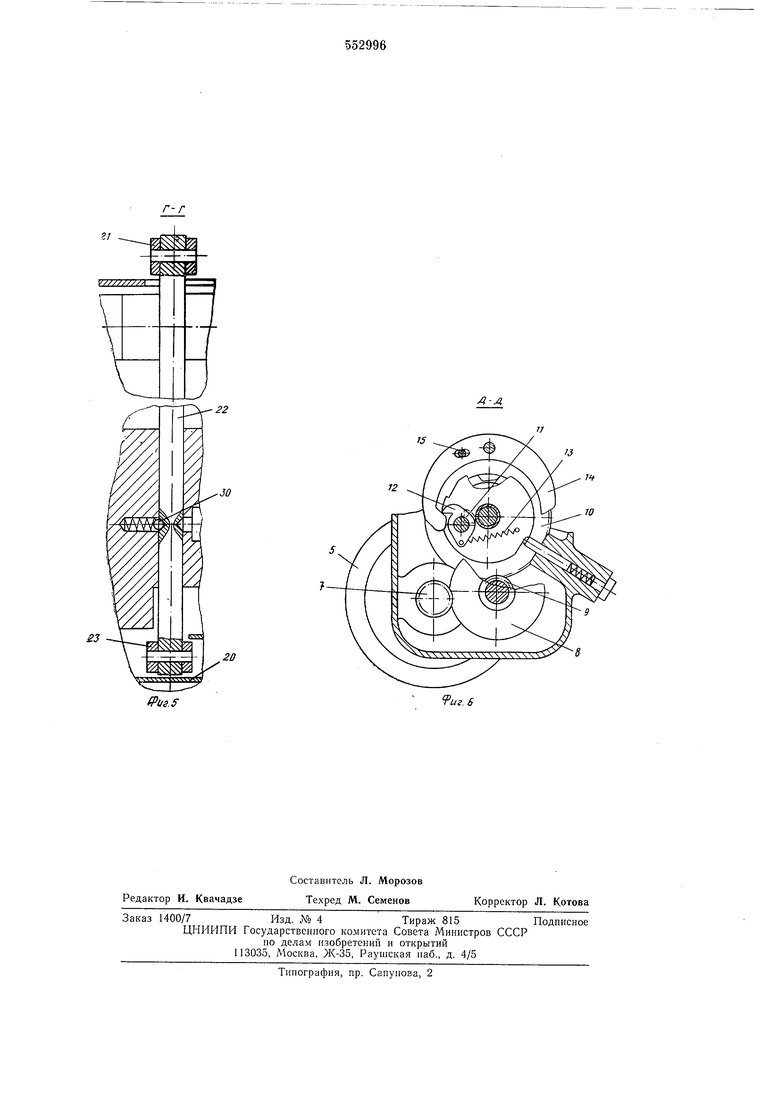
На вальце 1 смонтирован приводной шкив 4, ступица которого служит ведущим звеном ременной передачи, осуществляющей кинематическую связь вальца 1 с приводным шкивом 5 (фиг. 1, 4, 6) кривоо:ипно-шатунного механизма сближения и разведения вальцов (грубого привала-отвала). От шкива 5 до кривошипа 6 (фиг. 4) кинематическая связь осуществляется через шестерни 7, 8, 9, 10 (фиг. 4, 6), причем последняя является ведущим звеном муфты с вращающимся кулачком 11, собачкой 12 и пружиной 13 (фиг. 6).
С собачкой 12 контактирует коромысло 14 (фиг. 1, 6), в продолговатом отверстии которого находится ось 15 (фиг. 6). Ось 15 жестко закреплена в штоке 16 (фиг. 1), на выступ которого воздействует пружина 17, а на верхний торец - толкатель электромагнита 18.
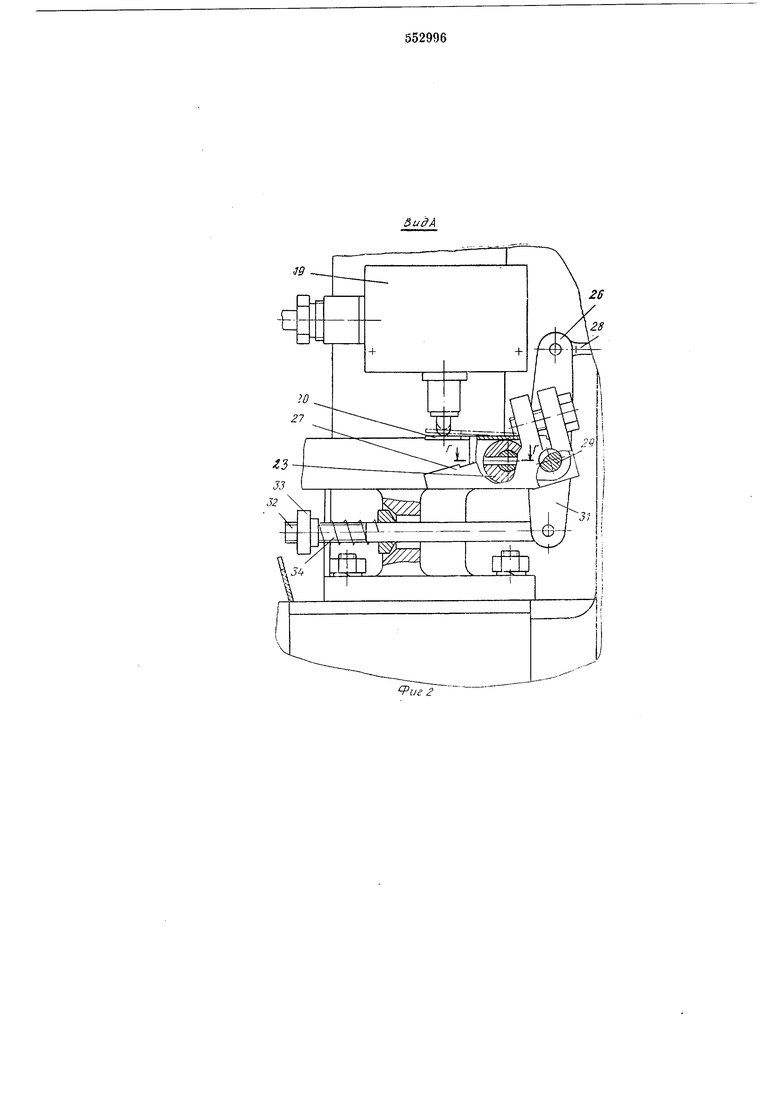
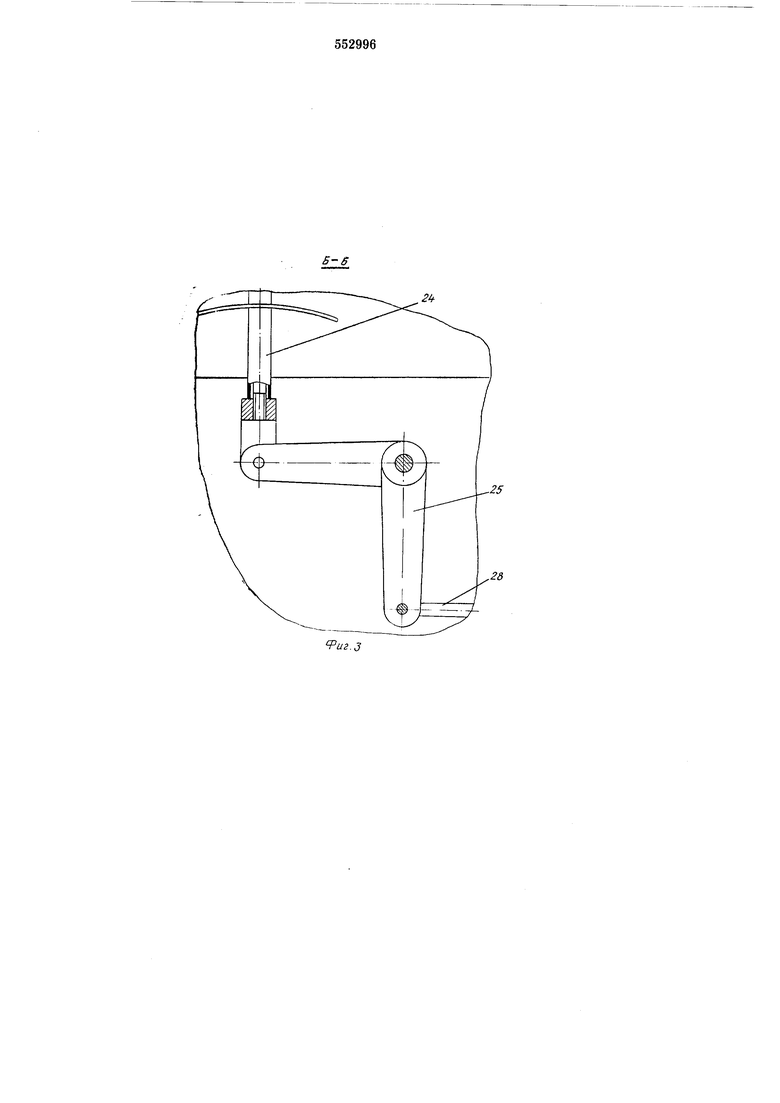
Электромагнит 18 электрически связан с переключателем 19 (фиг. 2), приводной механизм которого контактирует со скобой 20 (фиг. 2, 5). Воздействие руки человека на скобу 20 в режиме местного управления от рукоятки 21 (фиг. 1, 5) передается с помощью вала 22 и эксцентрика 23 (фиг. 2, 5). На отогнутый участок скобы 20 от датчика 24 наличия продукта (фиг. 1) продукт передают рычаги 25, 26 (фиг. 2), 27 и тяга 28 (фиг. 2, 3) через вал 29 (фиг. 2), относительно образующей которого скоба 20 может свободно вращаться. Таким образом, скоба 20 является общим звеном ручного блока местного управления и системы рычагов, соединяющих приводной механизм переключателя 19 и датчик наличия продукта 24.
В валу 22 выполнены два конических отверстия, в одном из которых находится подпружиненный шарик 30 (фиг. 5). .
Через вал 29, рычаг 31 (фиг. 2), винт 32 и гайку 33 массу датчика 24 воспринимает пружина 34.
Кривошип 6 через шатун 35 (фиг. 1, 4), рычаг 36 (фиг. 1) и подвеску 37 соединен с подвижными подшипниковыми опорами 3.
Работа Предложенного устройства происходит следующим образом.
При включении привода станка начинает вращаться шкив 4 и вальцы 1, 2.
Через ременную передачу вращение передается шкиву 5, а от пего через шестерни - шестерне 10.
Нри поступлении в питающую трубу станка продукта последний оказывает воздействие на датчик 24 наличия продукта, перемещение которого после преодоления сопротивления пружины 23 через рычаги 25, 26, а также тягу 28 передается рычагу 27. Рычаг 27 перемещается против часовой стрелки и между ним и скобой 20 образуется зазор.
При местном управлении (после декадных ремонтов или при вводе в эксплуатацию новой мельницы) вращают рукой на 180° рукоятку 21, которая через вал 22 поворачивает на этот же угол эксцентрик 23. При этом положении вал 22 фиксируется подпружиненным шариком 30, скоба 20 поворачивается против часовой стрелки и прекрашает воздействовать на приводной механизм переключателя 19. В результате замыкается электрическая цепь электромагнита 18, толкатель которого, нреодолев сопротивление иружины Г/, перемещает вниз шток 16, ось 15 и коромысло 14, повернув его по часовой
стрелке. Левый конец коромысла 14 освобождает собачку 12, которая под действием пружины 13 поворачивает кулачок 11.
Последний вступает в зацепление с упором вращающейся шестерни 10 и от нее вращение передается кривошипу 6. Вместе с ним перемещаются шатун 35, рычаг 36, подвеска 37 и подвижные подшипниковые опоры 3. В результате происходит привал вальца 2 к вальцу 1 и начинается процесс измельчения.
Привал вальцев заканчивается после поворота кулачка 11 вместе с шестерней 10 па 180°, когда другой конец коромысла 14 встречает и поворачивает собачку 12, нреодолев сопротивление пружины 13, а также выводит из
зацепления кулачок, И с упором шестерни 10. Вращением гайки 33 относительно винта 32 обеспечивается изменение деформации пружины 34 и, следовательно, через рычаг 31, вал 29, рычаги 25, 26 и тягу 28 регулируется сопротивление датчика 24 воздействию продукта. Тем самым достигается переменная величина столба продукта в питающей трубе.
При необходимости отвала вальцов вращением рукоятки 21 вращают вал 22 на 180° в обратном направлении, который фиксируется в новом положении шариком 30 и поворачивает эксцентрик 23 на тот же угол. Последний перемещает скобу 20 по часовой
стрелке и через приводной механизм переключателя 19 размыкает контакты электрической цепи электромагнита 18. Пружина 17 перемещает вверх шток 16 и ось 15, а последняя поворачивает коромысло 14 в первоначальное положение. При этом освобождается собачка 12, которая под действием пружины 13 поворачивает кулачок И для зацепления его с упором вращающейся шестерни 10. От шестерни 10 вращение передается
кривошипу 6.
Врашение кривошипа 6 приводит к перемещению в 0|братном направлении шатуна 35, рычага 36, подвески 37 и подвижных подшипниковых опор 3. Происходит отвал вальЦа 2 от вальца 1 и процесс измельчения прекращается.
Нри прекращении поступления продукта в питающую трубу станка энергия сжатой пружины 34 расходуется через гайку 33, винт 32,
рычаг 31, вал 29, рычаги 25, 26 и тягу 28 на перемещение датчика 24 вверх, а также на перемещение рычага 27 но часовой стрелке для воздействия через скобу 20 на приводной механизм переключателя 19. В связи с
этим после размыкания электрической цепи
электромагнита 18 происходит отвал вальцев.
При дистанционном управлении с пульта рукояткой 21 эксцентрик 23 устанавливается в положение, исключающее его воздействие через скобу 20 на приводной механизм переключателя 19. Поэтому размыкание цепи электромагнита 18 (отвал вальцев) возможен как при прекращении подачи продукта, так и при наличии продукта путем размыкания подводящей -цепи.
Упрощение конструкции станка достигнуто за счет исключения необходимости применения в устройстве герметичного пакетного переключателя и соединения его кабелем с распределительной коробкой. Кроме того, предложенная конструктивная реализация станка требует существенно меньщего количества электрических контактов, являющихся источниками искрообразования.
В связи с этим обеспечивается снижение взрывоопасности, т. е. создаются предпосылки для повыщения эксплуатационной надежности станка.
Формула изобретения
Вальцовый станок, содержащий мелющие вальцы, блок сближения и разведения вальцов, снабженный электромагнитным приводом, переключатель, приводной механизм которого системой соединительных рычагов функционально связан с датчиком наличия продукта, блок местного управления с замыкающим звеном, отличающийся тем, что, с целью упрощения и повыщения надежности работы, в нем блок местного управления выполнен в виде ручного преимущественно эксцентрикового механизма, а замыкающее звено - в виде одного из соединительных рычагов, кинематически связанного с приводным механизмом переключателя, который электрически соединен с электромагнитным приводом блока сближения и разведения
вальцов.
Источники информации, принятые во внимание при экспертизе изобретения:
1. Авторское свидетельство № 185680, к,л В 02С 4/06, 1965.
2. Айзикович Л. Е. и др. Мукомольно-элеваторная промыщленность за рубежом, М., ЦИНТИ Госкомзага СССР, 1964, с. 173.
. }
И9
fue 2
2
26
1
-
fPtJS.f
А-А
IS
}
If
Риг.Б
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для управления вальцовым станком | 1974 |
|
SU545377A2 |
| ВАЛЬЦОВЫЙ СТАНОК | 2011 |
|
RU2465050C1 |
| ВАЛЬЦОВЫЙ СТАНОК | 2008 |
|
RU2376064C1 |
| МУКОМОЛЬНЫЙ ВАЛЬЦОВЫЙ СТАНОК | 1996 |
|
RU2115477C1 |
| ЛЕНТОЧНО-ВАЛЬЦОВЫЙ СТАНОК | 2013 |
|
RU2538115C1 |
| Вальцовый станок с межвальцовым устройством | 2015 |
|
RU2616800C1 |
| ВАЛЬЦОВЫЙ СТАНОК | 1996 |
|
RU2112598C1 |
| Автомат для управления вальцовым станком | 1977 |
|
SU628946A1 |
| ДИСКО-ВАЛЬЦОВЫЙ СТАНОК | 2010 |
|
RU2442656C1 |
| МЕХАНИЗМ ПРИВАЛА-ОТВАЛА ПОДВИЖНОГО МЕЛЮЩЕГО ВАЛЬЦА ВАЛЬЦОВОГО СТАНКА | 1999 |
|
RU2162739C2 |