1
Изобретение относится к строительной технике и предназначено для использования при возведении металлических каркасов промышленных объектов.
Известно устройство для выверкп опорных плит 1.
Это устройство содержит набор различного рода ходовых и мерно-индикаторных элементов и предполагает применение псключительного ручного ириводного механизма.
Недостаток известного устройства заключается в том, что оно неудобно в эксплуатации.
Известно также другое устройство для выверки опорных плит . Это устройство содержит, в частпости, оптический илоскомер с визирной трубой, устанавливаемой па проектной высоте, и точечной маркой, укрепляемой иа опорной плите, датчик и мехапизмы отработки горизонтального ноложения опорной плиты, распорные трубки, насаживаемые на анкерные болты в фундаменте колонны, органы перемещения захватов опорной плиты относительно упоров, выполненные в внде рычагов с приводными звеньями.
Последнее из указанных устройств является наиболее близким к изобретению.
Недостаток известиого устройства заключается в том, что оно предусматривает постоянно взаимосвязанное использование оптического илоскомера и механизмов отработки положений опорной плиты. Это обстоятельство создает существенные трудности для обслуживающего персонала при примеиеннп устройства. Целью нзобретения является злучшенне условий эксплуатации устройства для выверки опорпых плит безвыверочно монтируе.мых колонн здания.
Поставленная цель достигается тем, что в устройство введены дополнительные элементы
отсчета и задатчики вертикального положения опорной плиты, блоки сравпения, причем входы элементов отсчета функционально связаны с соответствующими приводными звеньями, входы блоков сравнения - с выходами соответствующих элементов отсчета и задатчикв, входы органов перемещения захватов-с выходами соответствующих блоков сравнения, упоры попарно укреплены на распорных трубках, а рычагп соединены с соответствующими
верхннми упорами одним плечом шарнирно, а другим кинематически.
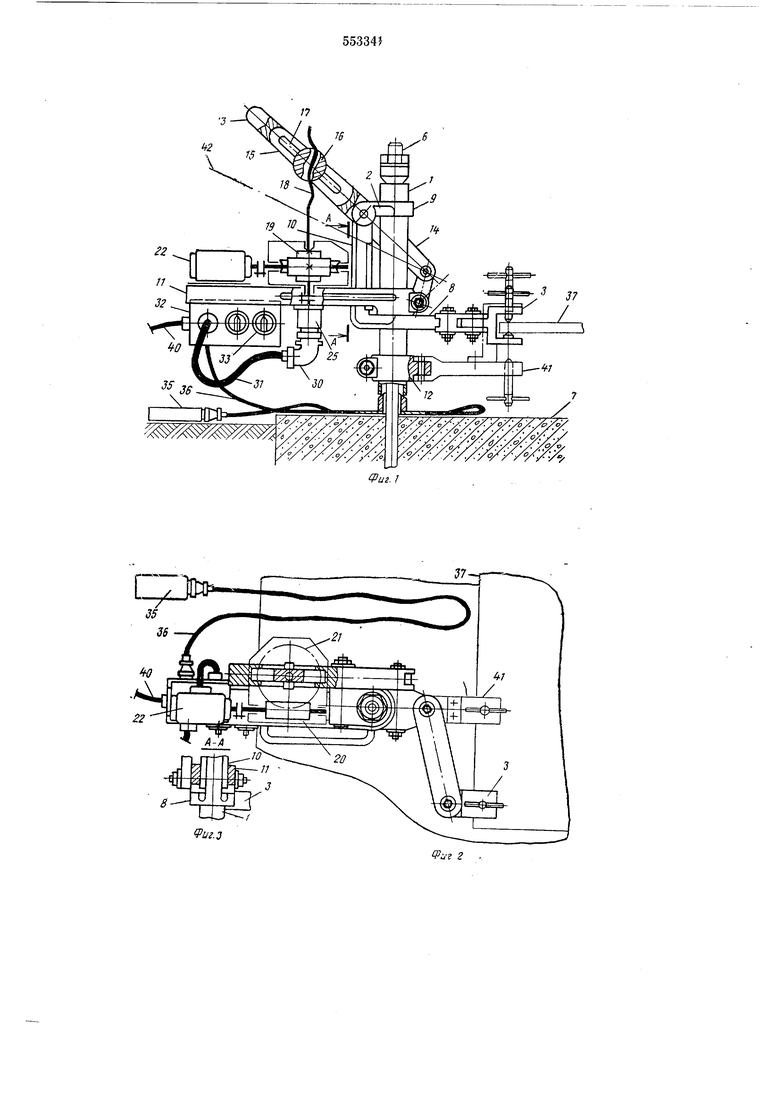
На фиг. 1 показан функцпопальный узел, входящнй в конструктивный комплекс по отработке положения опорной плиты; на
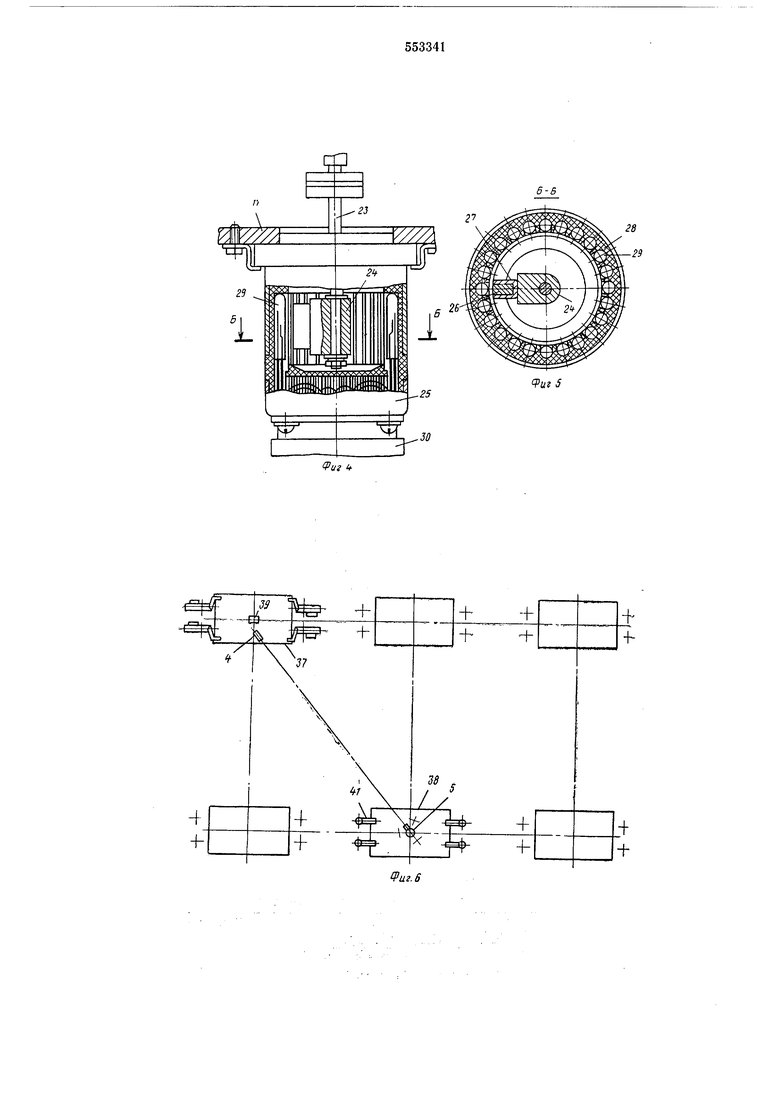
фиг. 2 - то же, вид в плане; на фиг. 3 - разрез по А-А на фиг. 1; на фиг. 4 - дополнительный элемент отсчета вертикального положения опорной плиты в разрезе; на фиг. 5 - разрез по Б-Б на фиг. 4; на фиг. 6 показано
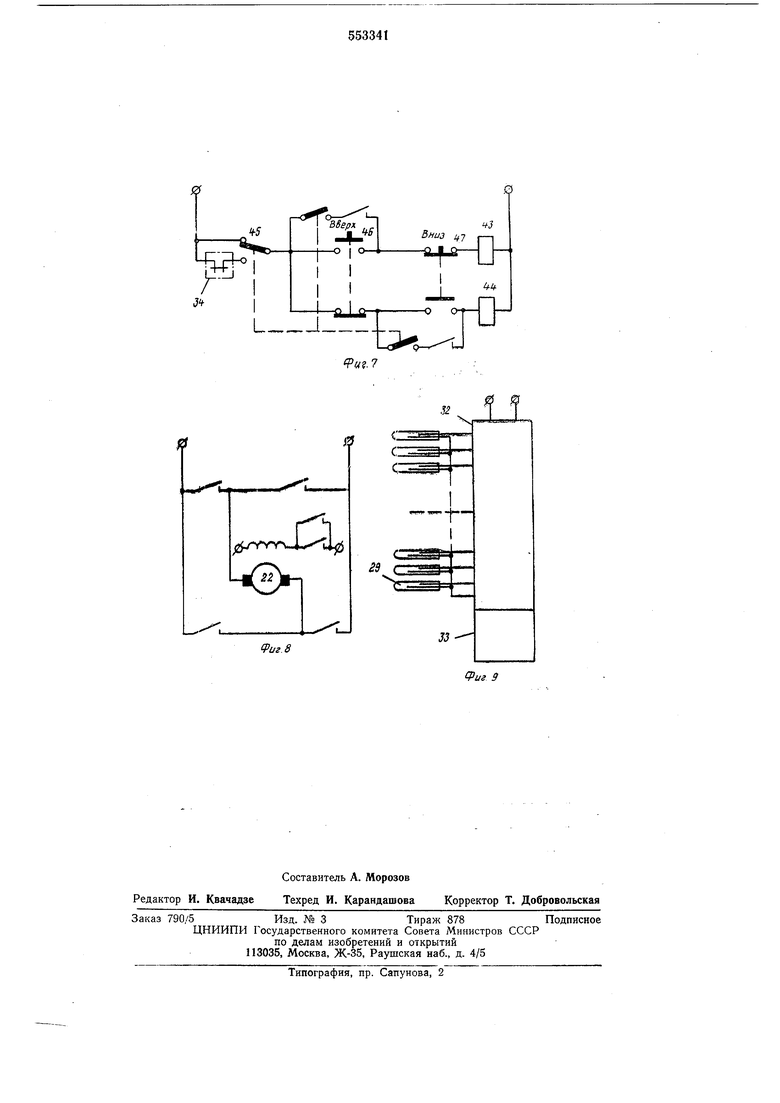
взаимодействие составных элементов оптичеCKoro плоскомера; на фиг. 7, 8 и 9 - отдельные элементы принципиальной электрической схемы управления устройством.
Устройство содержит раснорные трубки 1, органы перемещения 2, захваты 3, оптический плоскомер с точечной маркой 4 и визирной трубой 5. Распорные трубки 1 предназначены для насаживания на анкерные болты 6 в фундаменте 7 колонны и служат направляющими для полок 8, 9 и кронштейнов 10. В каждом отрабатывающем функциональном узле полка 8 кронштейна 10 расположена между жестко закрепленными на трубке 1 упорами 11 и 12. Полка 9 кронштейна 10 шарнирно связана с двуплечим рычагом 13, плечо 14 которого, в свою очередь, шарнирно соединено с упором И, а плечо 15 посредством кулачка-гайки 16, расположенной в направляющем пазе 17, связано с ходовым винтом 18. Кулачок-гайка 16 и ходовой винт 18 представляют собой винтовую передачу органа перемещения 2 захвата 3, другой передачей которого служит червячная пара -19 с ведущим колесом 20 (фиг. 2} и ведомым колесом 21. Ведущее колесо 20 соединено с электродвигателем 22. Ведущее колесо 20 соединено с одной стороны с ходовым винтом 18, а с другой стороны с осью 23 ротора 24 элемента отсчета 25 вертикального положения опорной плиты. Для повышения точности отсчета ось 23 элемента 25 отсчета можно соединить с ведущим колесом 20 со стороны противоположной присоединению к нему электродвигателя 22. Ротор 24 содержит магнит 26, помешенный в экран 27. По траектории вращения магнита 26 в статоре 28 элемента 25 отсчета расположены электроконтакты 29 (фиг. 4, 5, 9), выполненные в виде магнитоуправляемых контактов (герконов), которые через разъем 30 (фиг. 1, 4) и кабель 31 (фиг. 1) подключены к счетчику импульсов 32 (фиг. 1, 9) выполненному на логических элементах, например, унифицированной системы «Логика. Кроме того, счетчиком импульсов, совмещенным с задатчиками вертикального положения опорной плиты (элементом задания числа отсчета импульсов) 33, может служить реле счетно-импульсное, например, типа К-531 в специальном исполнении для монтажных условий. Размыкающий контакт 34 (фиг. 7) счетчика импульсов 32 введен в цепь включения электродвигателя 22, управление которым осуществляется с ручного переносного пульса 35 (фиг. 1, 2) через кабель 36. Светящаяся точечная марка 4 устанавливается на выверяемую поверхность опорной плиты 37, а визирная труба 5 располагается на исходной опорной плите 38 (фиг. 6), предварительно выведенной на проектную отметку. В состав устройства входит также датчик 39 горизонтального положения (углового отклонения от вертикали) опорной плиты 37, который может быть выполнен, например, в виде подвешенного в корпусе маятника, воздействующего при отклонении корпуса на расположенные во взаимно перпендикулярных плоскостях воспринимающие элементы механотронов. Кабели 40 (фиг. 1, 2) служат для подключения устройства к переносному автономному источнику питания. Для неподвижного закрепления
5 опорной плиты 37 после выверки перед демонтажом устройства используются фиксаторы 41, устанавливаемые на упорах 12. Допустимое предельное наложение рычагов 13 при опускании захватов 3 к фундаменту 7 соответствует
10 положению рычажной оси 42 (фиг. 1). Для коммутации каждого электродвигателя 22 применены реле 43, 44 (фиг. 7) с соответствующими замыкающими контактами (фиг. 7, 8). Помимо размыкающего контакта 34 счетчика
15 импульсов 32 в цепи питания катушек реле 43,
44включены переключатель 45 (фиг. 7) и кнопки 46, 47 перемещения захватов 3 вверх и вниз, расположенные на пульте 35.
Устройство работает следующим образом.
0 На трубки 1, насаженные на анкерные болты 6 фундамента 7, опорная плита 37 которого предназначена для выверки, надевают сначала упоры 12, а затем -7 упоры 11 с заранее смонтированными на них органами перемещения 2 захватов 3. Выставляют упоры 11, 12 на предполагаемый при выверке диапазон величин перемещения опорной плиты 37, подключают кабели 40 к переносному автономному источнику питания. Располагают на плите
0 37 датчик 39 и марку 4 укрепляют на исходной предварительно выверенной плите 38 визирную трубу 5, ориентируя ее на марку 4. На всех пульсах 35 устанавливают переключатели
45в положение «Полуавтоматическая работа. 5 Используя кнопки 46, 47 пульсов 35, выверяют горизонтальность плиты 37 по показаниям датчика 39. С нажатием кнопки 47 срабатывает реле 44, электродвигатель 22 запускается и приводит в движение червячную пару 19, связанную с ходовым винтом 18, который, вращаясь, поворачивает рычаг 13 в сторону опускания захвата 3 вниз к фундаменту 7. Аналогично с нажатием кнопки 46 срабатывает реле 43 и происходит взаимодействие электродвигателя 22 с рычагом 13, в результате чего осуществляется подъем захвата 3 вверх от фундамента 7.
После горизонтальной выверки плиты 37 производят ее выверку вдоль вертикали (поиск высотной отметки). Используя отсчетные данные визирования оптической трубы 5 на марку 4, устанавливают на устройстве все элементы задания числа отсчета импульсов 33 в положения, соответствующие отсчетным данным визирования. Переключая кабели 36 пультов 35 на общий пульт или обеспечизая одновременное нажатие соответствующих кнопок 46, 47 всех пульсов 35, запускают электродвигатели 22 устройства в положении переключателей 45 «Автоматическая работа. Ведомые колеса 21 червячных пар 19 вращают роторы 24 элементов отсчета 25. Роторы 24, вращаясь, воздействуют магнитами 26 на герконы 29, которые, последовательно срабаты5 вая, подают импульсы в соответствующие
5
счетчики 32. При отсчете счетчиками 32 числа импульсов, заданного элемеитами 33, контакты 34 счетчиков размыкаются. Электродвигатели 22 обесточиваются, выверка опорной плнты 37 вдоль вертикали прекращается. Работа устройства по выверке заканчивается.
Данное устройство обеспечивает повышенную производительность при достаточной точности выверки опорных плит.
Формула изобретения
Устройство для выверки опорных плит безвыверочно монтируемых колонн здания, содержащее онтический плоскомер с визирной трубой, устанавливаемой на проектной высоте, и точечной маркой, укрепляемой на опорной плите, датчик и механизмы отработки горизонтального положения опорной плиты, распорные трубки, иасаживаемые на анкерные болты в фундаменте колонны, органы перемещения захватов опорной нлиты относительно упоров, выполненные в виде рычагов с приводными звеньями, о т л и ч а ю HJ, е е с я тем, что, с целью улучи1ения условнй эксплуатации, в него введены дополнительные элементы отсчета и задатчики вертикального положения опорной плиты, блоки сравнения, ирнчем входы элементов отсчета функционально связаны с
соответствующими приводными звеньями, входы блоков сравнения - с выходамн соответствующих элементов отсчета и задатчиков, входы органов перемещения захватов - с выходами соответствующих блоков сравнения,
упоры иопарно укренлены на распорных трубках, а рычаги соединены с соответствующими верхними упорами одним плечом щарнирно, другим - кинематически. Источники информацни, принятые во внимание при экспертизе изобретения.
1.Авторское свидетельство N° 372336 кл. Е 04С 21/16, 1970.
2.В. К. Лопуза и В. Ш. Люльев. Применение оптического плоскомера для выверкп
опорных плнт. Реферативная информация о -передовом опыте (Минмонтажспецстрой СССР). Серия VII, Изготовление стальных и монтажно-строительных конструкций, выпуск 5 (20), 1970, с. 9-13,
J7
37
| название | год | авторы | номер документа |
|---|---|---|---|
| СОЕДИНЕНИЕ КОЛОННЫ С ФУНДАМЕНТОМ | 2000 |
|
RU2212505C2 |
| Узел крепления колонны к фундаменту | 1979 |
|
SU937635A1 |
| Способ монтажа пазовых закладных частей плоских затворов гидротехнических сооружений | 1985 |
|
SU1307014A1 |
| АВТОМАТИЗИРОВАННЫЙ СПОСОБ ВОЗВЕДЕНИЯ КАРКАСА СООРУЖЕНИЯ | 2011 |
|
RU2495987C2 |
| СПОСОБ ПОВЕРКИ ПЛОСКОМЕРА С ПОМОЩЬЮ ОПТИЧЕСКИХ СРЕДСТВ | 1973 |
|
SU386239A1 |
| СПОСОБ БЕЗВЫВЕРОЧНОГО МОНТАЖА МОДУЛЬНЫХ СТЕНОВЫХ ПАНЕЛЕЙ КАРКАСНОГО ЗДАНИЯ | 2013 |
|
RU2558880C2 |
| Устройство для выверки колес крана | 1977 |
|
SU673591A1 |
| Способ определения оси канала ствола для выверки прицелов и устройство для его осуществления | 2024 |
|
RU2836658C1 |
| ПАТЕНТНО-ТЕХНЙЧЕС | 1973 |
|
SU361270A1 |
| База колонны | 1982 |
|
SU1048079A1 |
Риг.з
Vui г .
-ь
21
4
j2 -ryrvi-.
fuz.S
33
