(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
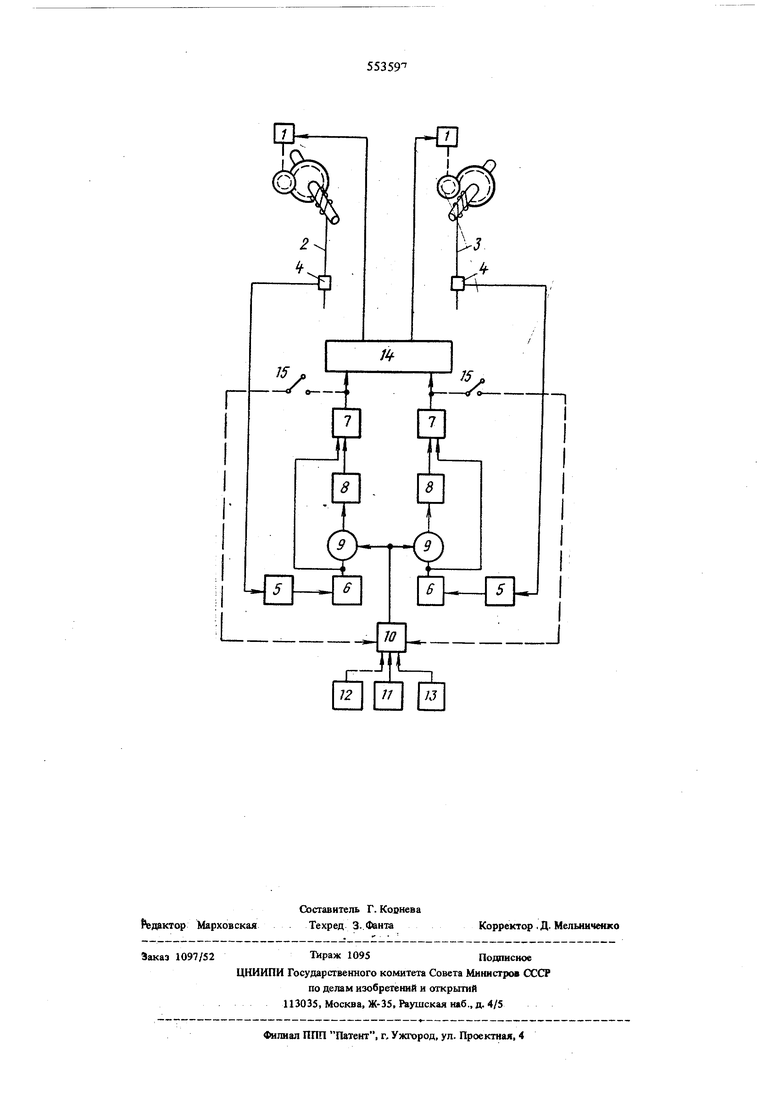
ПОЛОЖЕНИЕМ ПЛАВУЧЕГО ОБЪЕКТА го-цифровые преобразователи 6 с одними из входов цифровых компараторов 7, другие входы которых соединены с выходами аналого-цифровых преобразователей 6 через блоки 8 памята и клюта 9, управляюидае входы которых соединены с выходом блока 10 формирования нулевой уставки, соединенного своими входами с датчиком 11 нулевого отклонения по курсу и нуль-органами 12,13 акустической и инклинометрической систем позиционирования.,. Выходы цифровых компараторов 7 соединены с приводами 1 якорных лебедок через блок 14 управления. выходами блоком 7 и одним из входов блока 10 включены переключатели 15 реяшмов работы с основного на резервный. Устройство работает следующим образом: При попадании плавучего объекта в зону возмущающих воздействий, он будет перемещаться относительно заданной точки. При этом якорные цепи надветренной стороны будут натянуты, а якорные цепи протршоположной стороны ослаблены. Блок 14 форлотрует по сигналам от датчиков 4 натяжения управляющее воздействие на выбирание якорных цепей надветренной стороны. При этом усилия в этих якорных цепях еще больще возрастут. Контроль результатов управления ведется по усилиям в линиях противоположной стороны, а именно управление ведется до тех пор, пока усилия в этих якорных цепях не вызовут натяжеш1е, равное предварительному т. Р1атяжение якорной цепи измеряется датчиком 4, выход которого после обработки в вьпшслительном блоке 5 по известному алгоритму .( + h)+l , где h - вертикальное расстоя1ше от точки закрепления якорной цепи к платформе до дна; р - вес погонного метра якорной цепи; F - текущее значение натяжения якорной цепи, и преобразова1шя в аналого-цифровом преобразователе 6, поступает на вход цифрового компаратора 7, где фиксируется также информационный сигнал, поступивший из вычислительного устройства 5 через аналого-цифровой преобразователь 6 и ключ 9. Последний открьшается импульсом, сформированным блоком 10 в момент одновременного поступления на его входы сигналов от датчика 11 нулевого отклонения по курсу и нуль-органов 12, 13 акустической инклинометрической системы позиционирования. Таким образом, нулевая установка 7 записьшается в блок памяти 8 каждый раз при фиксировании нулевого положения акустической (инклинометричедкой) системой позиционирования и нулевого ожлонения по курсу датчиком нулевого отклонения II. Этим достигается точность работы системы автоматического управления положением плавучих буровых платформ при использовании динамометрической системы позиционирования, то есть акустическая (ишсгшнометрическая) система позиционирования является эталонной для динамометрической системь. При работе динамометрической системы в основном режиме и JB случае при выходе из строя акустической или инк шнометрической системы позиционирования нулевые уставки ть в блоках памяти 8 боответствующих якорцых цепей записываются (Ji помощью самой динамометрической: системы позиционирования и переключатель режима работ 15 устанавливается в положение основной. При этом вькоды цифровых компараторов 7 соединяются со входом блока 10. В результате ключи 9 всех якорных цепей будут открываться при формировании управляющего импульса блоком 10 при одновременном приходе на его входы импульса от датчика И нулевого отклонения по курсу и нулевых сигналов с выходов цифровых компараторов 7 якорных цепей подветренной стороны. Устройство позволит значительно продлить срок службы морского стояка и подводного устьевого оборудования. Формула изобретения Устройство для автоматического управления положением плавучего объекта, имеющего акустическую и инклинометрическую системы нозиционировашш с нуль-органами, содержащее якорные лебедки, блок управления приводами якорных лебедок, и датчики натяжения якорных цепей, соединенные через вычислительные блоки и аналого-цифровые преобразователи с одними из входов цифровых компараторов, соединенных своими выходами со входами блока управления приводами лебедок, отличающееся тем, что, с целью повыщения точности управления, устройство снабжено блоками памяти, датчиком нулевого отклоне1шя по курсу, ключами, блоком формирования нулевой уставки и включенными между выходами цифровых компараторов и входами блока формирования нулевой уставки переключателями режимов работы устройства с основного на резервный, причем выходы блока памяти соединены с другими входами цифровых компараторов, а входы - с выходами ключей, одни из входов которых соединены с выходами аналого-цифровых преобра- зователей, а другие - с выходами блока формирования нулевой уставки, соединенного другими своими входами с датчиком нулевого отклонения но курсу и нуль-органами акустической и инклинометрической систем позиционирования объекта. Источники информации, принятые во внимание при экспертизе: 1.Патент США №3422783, кл 114-144, 1969. 2.Патент США N 3580207, кл. 114-144, 1969.
Л
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения фазового перехода теплоносителя в нагнетательных скважинах | 1987 |
|
SU1469113A1 |
| ЦИФРОВОЙ ДИНАМОМЕТРИЧЕСКИЙ КЛЮЧ | 2015 |
|
RU2585907C1 |
| ИЗМЕРИТЕЛЬ НАКЛОНА ВАЛА РОТОРНОГО МЕХАНИЗМА | 2003 |
|
RU2253088C1 |
| СПОСОБ ЗАТЯЖКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ ДИНАМОМЕТРИЧЕСКИМ КЛЮЧОМ С ГИРОСКОПИЧЕСКИМ ДАТЧИКОМ УГЛА ПОВОРОТА, УСТАНОВЛЕННЫМ В КОРПУСЕ КЛЮЧА И ДИНАМОМЕТРИЧЕСКИЙ КЛЮЧ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2598974C1 |
| УСТРОЙСТВО ИНДУКЦИОННОГО НАГРЕВА ПЛОСКИХ МЕТАЛЛИЧЕСКИХ ИЗДЕЛИЙ | 1992 |
|
RU2076466C1 |
| СПОСОБ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА ЗАТЯЖКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ И ДИНАМОМЕТРИЧЕСКИЙ КЛЮЧ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2621363C1 |
| СПОСОБ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА ЗАТЯЖКИ РЕЗЬБОВЫХ СОЕДИНЕНИЙ И ДИНАМОМЕТРИЧЕСКИЙ КЛЮЧ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2550373C1 |
| Устройство для обработки термограмм паронагнетательных скважин | 1988 |
|
SU1596100A1 |
| Устройство для централизованного контроля параметров | 1981 |
|
SU962864A1 |
| Устройство для автоматического диагностирования технического состояния эксплуатационной колонны труб в паронагнетательных скважинах | 1988 |
|
SU1550120A1 |