(54) УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ГРУЗОПОДЪЁМНОГО
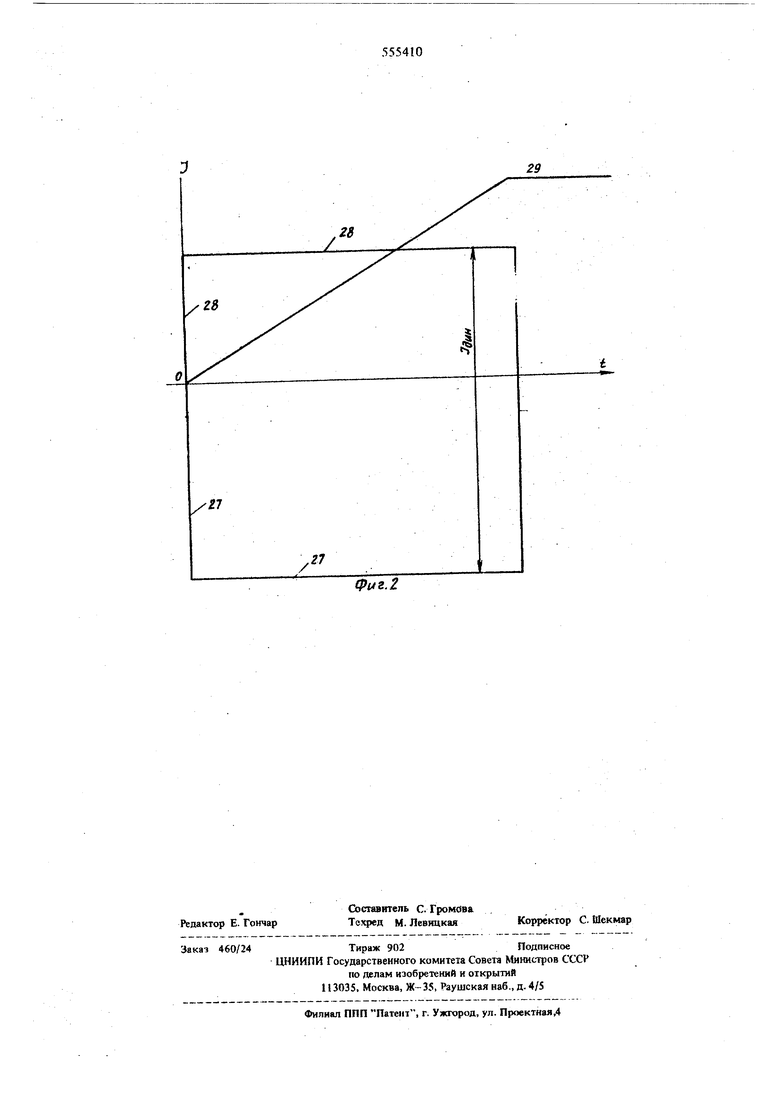
МЕХАНИЗМА агорой обмотки управления преобразователя, третья обмотка управления которого одним концом coejwHena с вторым выводом, а другим концом - с четвертым делтеич напряжения. На фиг. 1 предсгавлсма прии.адииальная схема устройства; на фиг. 2 прикедены кривые переходлого процесса привода, поясняющие при}щнп работы предлагаемого устройства в динамике. Ус1ройсгво состоит иэ nciUifiiMTciibHOio двигателя I с обмоткой 2 доипл 1(1тельных полюсок и обмоткой возбуждемня ., прообр.пгя птеля 4 переменного тока в иослжлный, имеющего первую обмготку уяравлеиия 5, нодкптч миун) к источнику ПИ1ЙНИЯ 6 и выполняющую (ЮЛЬ эядяклией; вторую обмотку управления 7, вын11Л51;тк)111ую роль обмотки отридательной обра гной свя.ш по гоку с отсеь Koii; TjTeibro обмотку упрзн1ения R, ncyiuecrB.inroщую положите.иьнут обрашую ни напряжению преобразователя. К вьгход нреобря-чсшатолч 4 подключен деятель напряжения. .чч,;1-г) ич резисторов 9, 0, и 1 , примем напряжение с второго и четвертого выхолов де.титслн н:Н1рялсення подается на третью упрян)е1шя 8, и резисторы 9, 10 и 11, сонротив.чениеякоря -;с1(о.лн гельк.)го днигателя и сопротивление обмотки 2 дополнительных полюсов юставпяют нлечи тахомегрического моста. В диагональ мосга между треи.им ььгходом до)1Ителя напряжения и вторым кондом обмотки добавочных полюсов черед первь Й переменный резне,тор 12 включена первичная обмогка 13 ллфферентдаругопдего 1рансформато1)а 14; nejwan вторичная обмотка 5 дифференцирующего трансформатора, осун(ествляю1цего обратную евяэь но ускоре тю, включена одним кондом к источнику опорного напряжения 16, а друтим через второй переменный резистор 17 - к третьему переменному резистору 18, выгюлняюи1ему фу11к«шю делителя опорного напряжения. Вторая вторичная обмогка 9 диффереюшрующего трансформатора поиклюкми од,т1М концом ко второму концу обмотки донолнителькых полюсов, а вторым - к вьжояу четне})гого переме)1ного резистора 20. Лругой вывод резисюра 20 под;клшчен к второму KOiH.tj второй обмотки ут1равлет я 7. первый конец которой через нелинейный элемент 21 соединен с ио;хвижчп(м контактом третьего неременного резистора 18. Нанряжение между подвижным KOiiiaKTOM третьего переменного резистора 18 и общей точкой источников опорного напряжения 6 и источника напряжения смещения 22 является напряжением ср;внения токовой отсечки 23. В якорную цепь между выходом преобразователя и первым конном обмотки дополнительных полюсов включен регистрирующий прибор 24, предназначен1гый для контроля уставки нагрузки. Мснолни1е..ьньш двигатель 1 механически соединен с элект}эомеханическим тормозным устройством 25 и двигателем испытуемого электропривода 26. Первая обмотка управлетшя предназначена для .реализащ1И необходимого направления момента при митаг ии режимов спуска или подъема в заданном иапазоне скоростей и обеспечивает граничные хаактеристики 27. Лпя получения механических характеристик сполнительного двигателя I, имеющих нулевую есткоегь. в системе используются отрицательная братная связь по току с отсечкой и положительная, братная связь по напряжению. Установка требуемого момента па валу испытуемого двигате.чя определяется положением движка переменного резистора. Величина источника напряжения смещения 22, Бклточе;гного встречно с источником опорною напряжения 16, опредедяется ;1иацаз.ном нагрузок в режиме сидот ого спуска. ПШравка Tia разность моментов инердии реализуется в предлагаемой схеме введением добавочной 3 д.с. обмотки 19 ;тифференцируюи(его трансформаюра 14, пропорциона|1ьной ускорению и вклняенной последовательно с сигналом, пропорциональным току, стшмаемым в г(анной схеме, с добавочных полюсоь 2 двигателя. С целью введения поправки, пропорциональной массе труза и ускорению, з.д.с обмотки 15 дифференни|)уютцего трансформатора 14 включена последовательно с источником опорного напряжетшя 16. При этом напряжение, снимаемое с регулируемого резистора J8, изменяется в динамике пропорционально ускорению и зависит от положения подвижного контакта резистора, определяющего уставку сташческото момента и, следовательно, массы 1руза. На фиг. 2 представлены кривьте переходного процесса привода с испо)гнигельным д 5ит-ателем, работающето от безьшердионного преобразователя по предлатаемой схеме. Предполагается, что в качестве испытуемого и тгагрузочного (испол1штельного) использованы одинаковые двигатели, потери в нагрузочном не уч пьгваются и закон изменетшя тока испытуемого двигателя соответствует кривой 27. Кривая 28 от1редедяет изменение тока в исполнительном двигателе, а кривая 29 - скорость ттривода при нуске на подъем испытуемого двигателя в функции времени t «Зду,ц динамический ток испытуемого двигателя, оттределяюттдай, в данном .случае, постоянство ускорения при разбеге двигателя с учетом вводимой в Т1епь якоря исполнительно- ; го двигателя поправки по току. Формула изобретения Устройство для моделироратиш грузоподъемного механизма, содержащее преобразователь переменного тока в постоянньтй, первая обмотка управления которого подключена к источнику питания, выходы преобразователя подключены соответственно к первому и второму выводам делителя напряжения и к первому концу обмотки nonojninienbUbix полюсов и в цепь якоря исполнительного двигателя, механически Соединенного с электромеханическим
тормозным блоком, переменные резисторы и источник опорного напряжения, отличающееся тем, что, с целью увеличения точности моделирования, устройство содержит источник смещения, нелинейный элемент и диффере1ширующий трансформатор, первичная обмотка которого соединена с первым переменным резистором, нодключенным к третьему выводу делителя напряжения, и с вторым концом обмотки донолнительных нолюсов исполнительного двигателя, первая вторичная обмотка дифференцирующего трансформатора соединена с источником опорного напряжетшя и с вторым пере менным резистором, нелш1ейный элемент, соединенный с первым концом второй обмотки унравлеНИН преобразователя и с подвижным контактом третьего переменного резистора, сгешненного с источником смеп1ения, подключенным к первому концу обмотки дополиитерытых полюсов исполни тельного двигателя и с вторым пepe feмным резистором, вторая вторичная обмотка .тффсрстщирутощ т) трансформатора соединена с вгсрым концом обмотки дополнительных полюсов исполнительного двигателя и через четвертый пером.иныГт резистор с вторым конном второй ofiMdfKH упх влсчич преобразователя. третья обмотка упр.ччления которого одним концом соединена с BioiUiM ныводом, а другим концом - с че)вгр1Ь1м HMnorifM дели1р; я напряжеш1я.

| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Устройство для контроля обрыва изделий при перемотке | 1980 |
|
SU938288A1 |
| УСТРОЙСТВО ДЛЯ КОМПЛЕКСНОЙ ЗАЩИТЫ ЭЛЕКТРОДВИГАТЕЛЯ ОТ ПОВРЕЖДЕНИЯ | 1991 |
|
RU2015598C1 |
| ИНВЕРТОР НАПРЯЖЕНИЯ | 2005 |
|
RU2284639C1 |
| СПОСОБ И РЕВЕРСИВНОЕ УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ МАГНИТНОГО ПОЛЯ ФЕРРОМАГНИТНОГО СЕРДЕЧНИКА В ТЕПЛОВУЮ ИЛИ ЭЛЕКТРИЧЕСКУЮ ЭНЕРГИЮ | 2014 |
|
RU2586251C2 |
| УСТРОЙСТВО КОМПЛЕКСНОЙ ЗАЩИТЫ ЭЛЕКТРОТЕХНИЧЕСКОЙ СИСТЕМЫ | 1995 |
|
RU2115986C1 |
| Устройство для защиты установки с параллельно включенными выпрямителями | 1983 |
|
SU1101962A1 |
| Устройство для защиты от повреждений электрической сети | 1984 |
|
SU1275624A1 |
| Устройство для защиты от тока короткого замыкания фидера контактной сети переменного тока электрических железных дорог | 1978 |
|
SU792406A1 |
| Стабилизированный преобразователь переменного напряжения в постоянное | 1980 |
|
SU1001377A1 |
О
,25 ф(/г. 1
