(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА ТЯЖЕСТИ ЧЕЛОВЕКА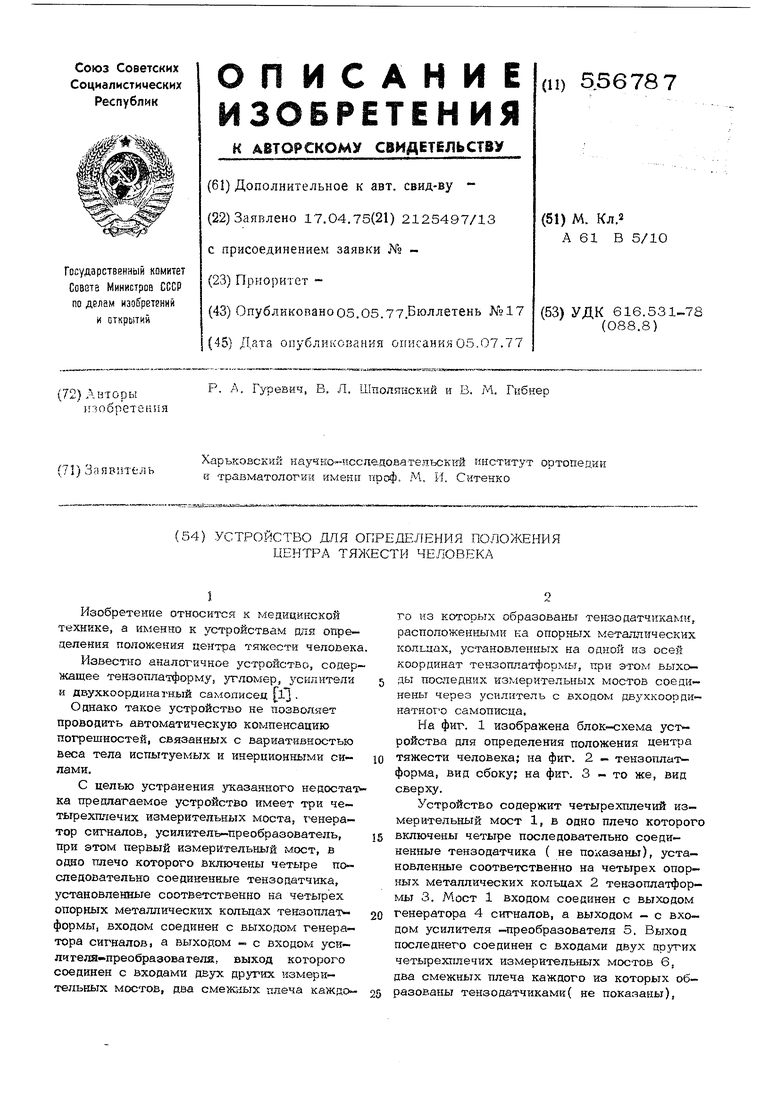
Изобретение относится к медицинской технике, а именно к устройствам для опреаеления положения центра тяжести человек
Известно аналогичное устройство, содержащее тензои.г1атформу, угломер, зсилители и двухкоординагный самописец ij .
Однако такое устройство не позволяет проводить автоматическую компенсацию погрешностей, связанных с вариативностью веса тела испытуемых и инерционными силами.
С целью устранения указашюго нецостака предлагаемое устройство имеет три четырехплечих измерительных моста, генератор сигналов, усилитель-преобразователь, при этом первый измерительный мост, в одно плечо которого включены четыре последовательно соединенные тензодатчика, установленные соответственно на четырех опорных металлических кольцах тензоплатформы, входом соединен с выходом генератора сигналов) а выходом - с входом уси- лигеля-преобразователя, выход которого соединен с входами двух других измерительных мостов, два смежных плеча каждого из которых образованы тензо датчиками, расположенными ка опорньгх металлических колщах, установленных на одном из oceir координат тензоплатформы, при этом выходы последних измерительных мостов соединены через усилитель с входом двзхкоорди- натного самописца.
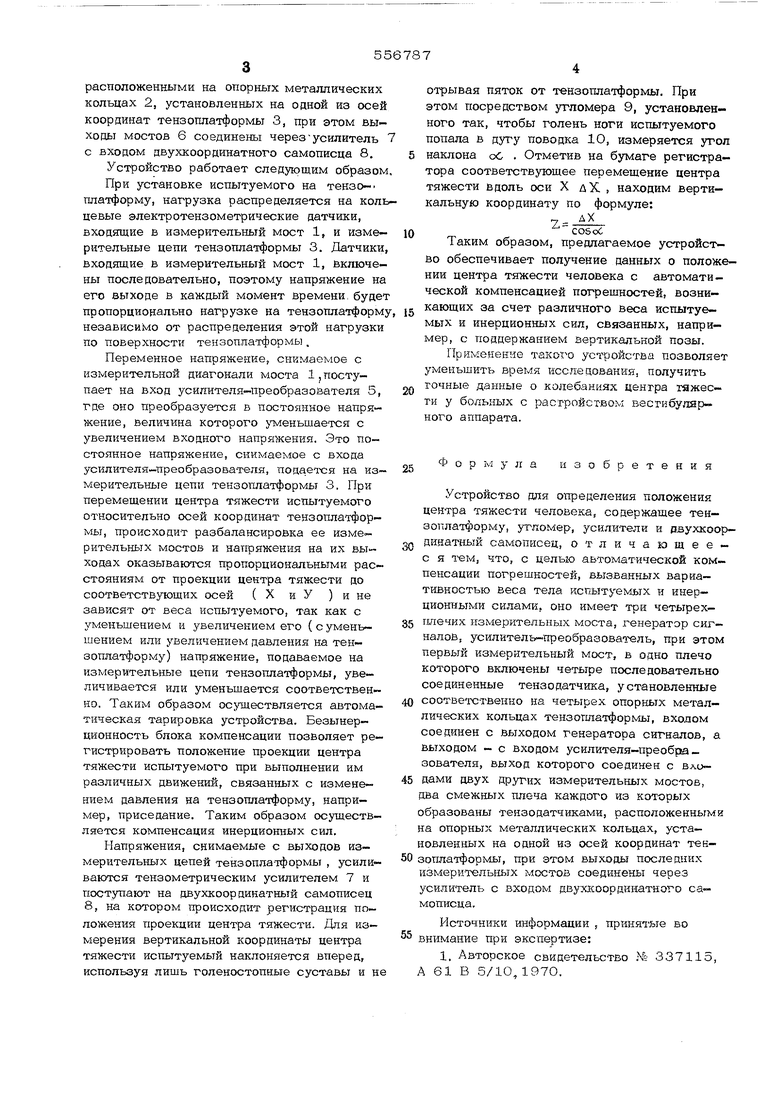
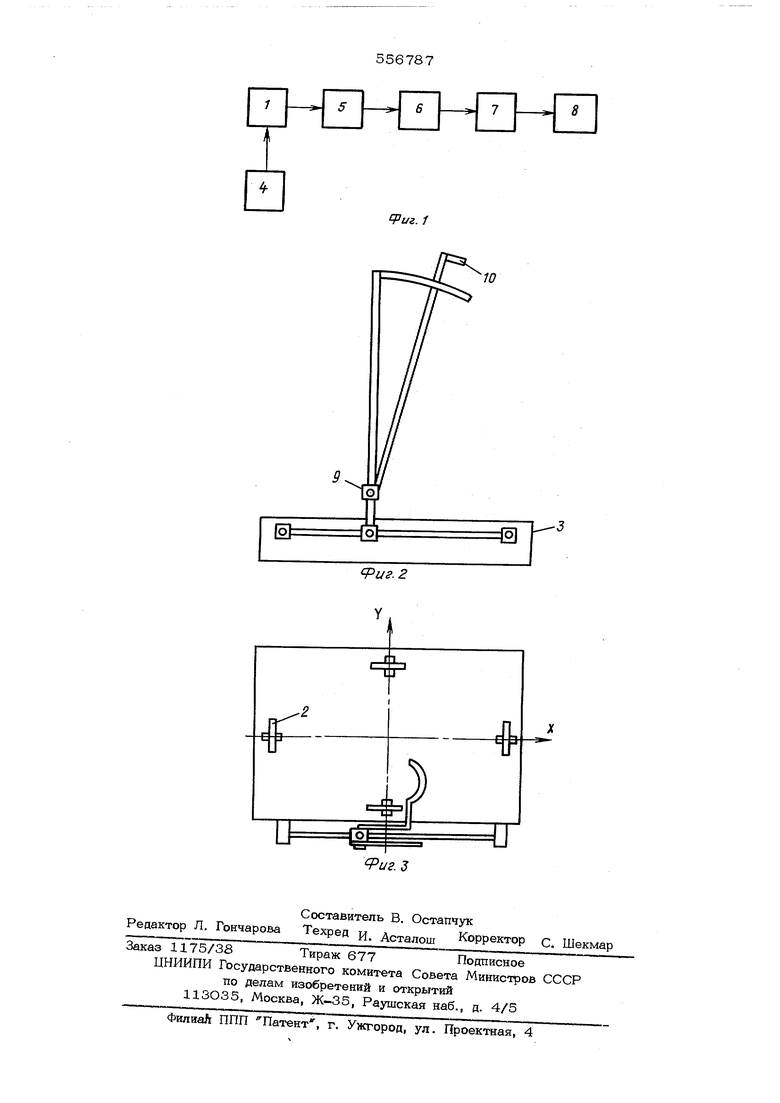
На фиг. 1 изображена блок-схема устройства для определения положения центра тяжести человека; на фиг. 2 - тензоплатформа, вид сбоку; на фкг. 3 - то же, вид сверху.
Устройство содержит четырехплечий измерительный мост 1, в одно плечо которог включены четыре последовательно соединенные тензодатчика ( не показаны), установленные соответственно на четырех опорных металлических кольцах 2 тензоплатфор- мы 3. Мост 1 входом соединен с выходом генератора 4 сигналов, а выходом - с входом усилителя -преобразователя 5. Выход последнего соединен с входами двух других четырехплечих измерительных мостов 6, два смежных плеча каждого из которых образованы тензодатчиками( не показаны). расположенными на опорных металлических кольцах 2, установленных на одной из осей координат тензоплатформы 3, при этом выходы мостов 6 соединены черезусилитель с входом двухкоординатного самописца 8, Устройство работает следующим образом При установке испытуемого на тензоплатформу, нагрузка распределяется на кол цевые электротензометрические датчики, входящие в измерительный мост 1, и измерительные цепи тензоплатформы 3. Датчики входящие в измерительный мост 1, включены последовательно, поэтому напряжение на его выходе в каждый момент времени, буде пропорционально нагрузке на тензоплатформ независимо от распределения этой нагрузки по поверхности тензоппатформы . Переменное напряжение, снимаемое с измерительной диагонали моста 1,тгоступает на вход усилителя-преобразователя 5, где оно преобразуется в постоянное напряжение, величина которого ту еньшается с увеличением входного напряжения. Это постоянное напряжение, снимаемое с входа усилителя-преобразователя, пойае1х;я на из мерительные цепи тензоплатформы 3. При перемещении центра тяжести испытуемого относительно осей координат тензоплатформы, происходит разбалансировка ее измерительных мостов и напряжения на их выходах оказываются пропорциональными расстояниям от проекции центра тяжести до соответствующих осей (X и У ) и не зависят от веса испытуемого, так как с уменьшением и увеличением его ( с уменьшением или увеличением давления на тензоплатформу) напряжение, подаваемое на измерительные цепи тензоплатформы, увеличивается или уменьшается соответственно. Таким образом осуществляется автоматическая тарировка устройства. Безынер- ционность блока компенсации позволяет регистрировать положение проекции центра тяжести испытуемого при выполнении им различных движений, связанньтх с изменением давления на тензоплатформу, например, приседание. Таким образом осуществляется компенсация инерционных сил. Напряжения, снимаемые с выходов измерительньтх цепей тензопла-тформы , усиливаются тензометрическим усилителем 7 и поступают на двухкоор динатный самописец 8, на котором происходит регистрация положения проекции центра тяжести. Для измерения вертикальной координаты центра тяжести испытуемый наклоняется вперед, используя лишь голеностопные суставы и н отрывая пяток от тензоплатформы. При этом посредством угломера 9, установленного так, чтобы голень ноги испытуемого попала в дугу поводка 10, измеряется угол наклона cxS . Отметив на бумаге регистратора соответствующее перемещение центра тяжести вдоль оси X дХ , находим вертикальную координату по формуле: Таким образом, предлагаемое устройство обеспечивает получение данных о положении центра тяжести человека с автоматической компенсацией погрещностей, возни- .....Y мых и инерционных сил, связанных, например, с поддержанием вертикальной позы. Прртменение такого устройства позволяет уменьшить время исследования, получить точные данные о колебаниях ценгра гяжесги у больных с растройстБОм весгибуляр- ного аппарата. Фор ivi У Л а изобретения Устройство для определения положения центра тяжести человека, содержащее тензоплатформу, угломер, усилители и рзухкоординатный самописец, отяичающеес я i-eM, что, с целью автоматической компенсации погрешностей, вызванных вариативностью Веса тела испытуемых и инерционными силами, оно имеет три четырехгшечих измерительных моста, генератор сигналов, усилитель-преобразователь, при этом первый измерительный мост, в одно плечо которого включены четыре последовательно соединенные теизодатчика, установленные соответственно на четырех опорных металлических кольцах тензоплатформы, входом соединен с выходом генератора сигналов, а выходом - с входом усилителя-преобразователя, выход которого соединен с ВАУдами двух других измерительных мостов, два смежных плеча каждого из которых бразованы тензодатчиками, расположенными а опорных металлических кольцах, устаовленных на одной из осей координат тевoплaIфopI лы, при этом выходы последних измерительных мостов соединены через усилитель с входом двух1соординатного самописца. Источники информации , принятые во внимание при экспертизе: 1. Авторское свидетельство . 337115, 61 В 5/10,1970.
