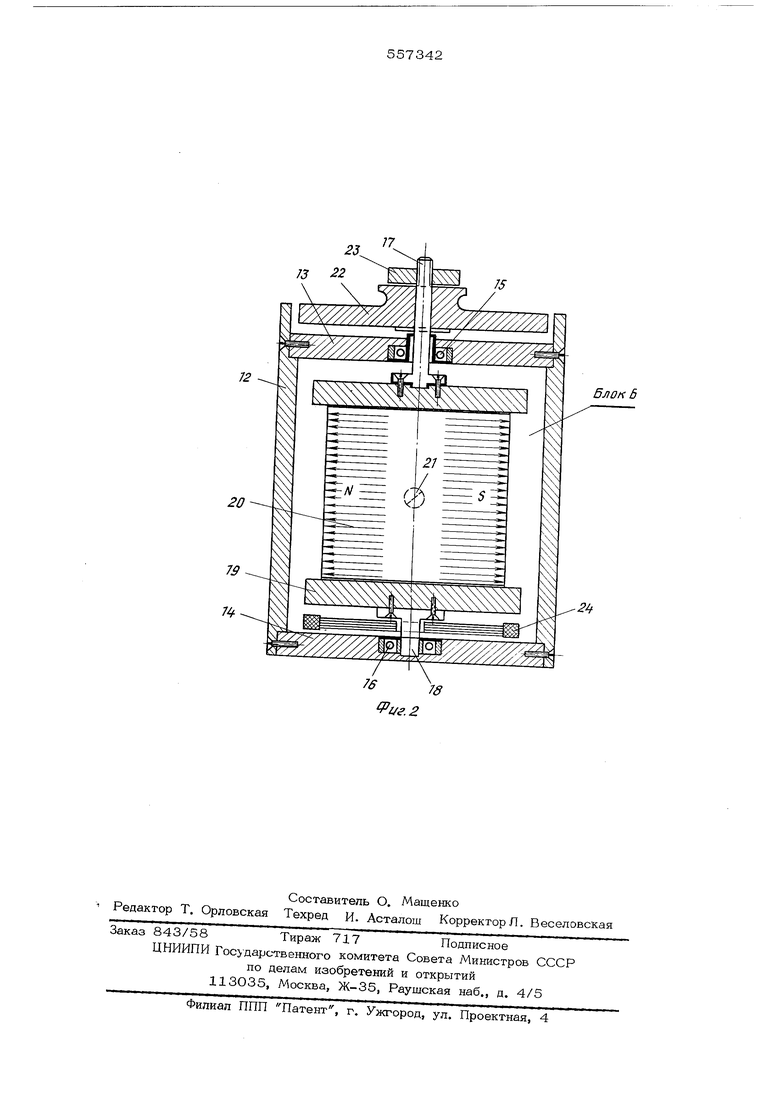
ем НИКИ СЗ. На столе вибрационной плат формы жестко закрепляется один или несколько сейсмоприемникоБ и путем механического перемещения стола с определенно частотой и амплитудой вдоль оси максимальной чувствительности в преобразовате ле испытуемого сейсмоприемника вырабаты вается ЭДС, до которой определяют соответствующие параметры. При помощи вибрационной платформы можно получить амплитудно-частотные и ф зово-частотные характеристики сейсмоприемников, исследовать идентичность комплекта сейсмоприемников, подключенных ко входу усилителей сейсмостанции на соответствующие каналы и т. д. Однако, громоздкость вибрационной платформы, сложность вспомогательной электронно-измерительной аппаратуры, требующей дополнительных источников питания, не позволяет применять известное устройство для определения параметров в полевых условиях. Отсчет смещения стола виброплатформы при помощи микроскопа утомляет оператора, так как для каждого сейсмоприемника необходимо произвести отсчет показаний не менее чем для десяти точек (на различ ных участках частотного спектра). Сложность и трудоемкость процесса получения исходных данных для построения частотны характеристик на каждый сейсмоприемник резко снижают производительность. Особенно это заметно при определении большого количества сейсмоприемников (1000-2000 шт). Цель)о изобретения является повышение производительности. Поставленная цель до тигается тем, что задатчик колебаний выполнен в виде постоянного магнита, помещенного в корпус и закрепленного в немаг нитной оправке с контрольной катушкой, жестко связанной с корпусом, при этом постоянный магнит расположен по центру установочной платформы с воздушным за.зором между платформой и корпусом. На фиг. 1 показано предложенное устройство в общем виде, блоки А и Б; на фиг. 2 - блок Б, разрез. Устройство для определения параметров сей смоприемников состоит из блоков Аи Б. Блок А включает в себя установочную платформу 1 i уровень 2, направляющие уголки 3, ог раничительные упоры 4, испытуемые сейсмоприемники 5-10, стопорный винт 11. В центре блока А с воздушным зазором устанавливается вращающийся постоянный магнит-задатчик (блок Б). Блок Б содержит корпус 12 с фланцами 13, 14, Подшипники 15, 16, вращающиеся на осях 17, 18, оправки 19 из немагнитного металла, постоянный магнит (сплав ЮНДК-241 2О, стопорный винт 21, шкив-маховик 22, гайку 23, контрольную катушку 24. В зависимости от применения устройства (для лабораторных или полевых работ) блок А изготавливается в различных вариантах, удобных для работы. Например, для определения параметров низкочастотных сейсмоприемников в полевых условиях установочная платформа выполняется в виде трафарета, в которой ячейки для сейсмоприемни- ков имеют сквозные отверстия и не фиксируют сейсмоприемники на установочной платформе, так как эти сейсмоприемники должны контактировать с окружающей средой, через которую им будет передан полезный сейсмический сигнал. Установочная платформа для лабораторного определения параметров показана на фиг. 1. Определение параметров и контроль за работой всего сейсморегулирующего тракта при помощи устройства осуществляется следующим образом. На месте установки комплекта сейсмоприемников для регистрации составляющих X, У, Z в грунте делается углубление, куда устанавливается в соответствующей ориентации трафаретная платформа (блок А). В ячейки этой платформы, на грунт, в определенной последовательности устанавливаются рабочие сейсмоприемники и подключаются в рабочем режиме к регистратору. В центре блока А имеется отверс- тие, куда в соответствующем положении устанавливается и закрепляется в грунте зада-гчик (блок Б). Затем трафаретнаяплатформаудэляется, а на грунте остаются сейсмоприемники и задатчик. Для получения записи параметров шкивмаховик (22) раскручивают до заданной частоты, включают рабочий регистратор и производят запись на магнитную ленту или другой носитель записи. Процесс записи длится 1-2 мин. (до остановки вращения задатчика). После проведения необходимых операций блок Б тоже удаляется, и с целью повторной проверки параметров место установки блока Б закрывается жестким колпаком, а при надобности, после приема сейсмической информации, можно осуществить контрольную проверку параметров путем усановки задатчика на прежнее место и проедения соответствующих операций для повторной записи параметров без нарушения ранее заданных условий рабочего режима. Сопоставление записей последних данных с предыдущими выявит, насколько изменились за этот промежуток времени параметры сейсмических каналов или сейсмоприемников, и может учесть аппаратурные ошики, присутствующие в данной сейсмической информации.
Принцип работы устройства следующий, При вращении постоянного магнита 20 его магнитное поле циклически воздействует на преобразователи сейсмоприемников 5-9, в результате чего в катушках этих преобразователей вырабатывается результирующая ЭДС, состоящая из собственной ЭДС (от преобразователя) в внещней ЭДС2 (от задатчика), В процессе измерения происходит монотонное убывание частоты, и, по мере приближения ее к собственной частоте сейсмоприемника, сдвиг фазы колебаний инертной массы сейсмоприемника увеличиваеся, адостигнувмаксимумарезонанса, фазачастоты колебаний инертной массы сейсмоприемнка становится равной 180° по отношению тс фазе частоты колебаний задатчика. При этом ЭДС и ЭДС складываются в противофазе, и на выходе преобразователя на этом участке переходного процесса результирующая ЭДС равна нулю.
Установочную платформу и задатчик устройства можно откалибровать по смещению любым сейсмоприемником с известными параметрами (эталонным сейсмоприемником ).
Осциллограммы показывают, что область резонансной частоты сейсмоприемника выражается отсутствием записи колебаний, в то время как инертная масса этого сейсмо- приемника вместе с катушкой совершает максимальное перемещение в зазоре магнитной системы.
Середина участка с отсутствием записи колебаний на трассе испытуемого сейсмо- приемника сопоставляется с записью частоты задатчика на трассе, по маркам времени определяется частота задатчика, а по контрольной прямой, опущенной по марке через всю осциллограмму, определяется место положения собственной частоты для каждого сейсмоприемника, в том числе и для эталонного. Для оперативного определения собственной частоты (визуально) середина участка с отсутствием записи испытуемых сейсмоприемников сопо- ставляется с серединой того же участка эталонного сейсмоприемника. Точность визуального определения может допускать разброс ± 2% от заданного значения.
Длительность участка с отсутствием записи колебаний определяет затухание инертной массы сейсмоприемника в рабочем режиме. Сопоставляя эти участки испытуемых сейсмоприемников с участком эталонного сейсмоприемника, легко определить затухание.
Сопоставлением амплитуд колебаний испытуемых сейсмоприемников и эталонного сейсмоприемника на интересующих частотах получают амплитудно-частотную характеристику для каждого испытуемого сейсмоприемника.
Так как испытуемые и эталонный сейсмоприемники находятся в одинаковых условиях и симметрично, через определенное расстояние, установлены по кругу, в центре которого находится циклический задатчик, то на записи будет наблюдаться постоянный фазовый сдвиг Vcowi частоты колебаний соседних сейсмоприемников в той последовательности, в какой они установлены по кругу. Величина Фсел равна 360 / п где TI - число сейсмоприем}шков. При этом число 77 должно быть кратным 2, 4, 6, 8, 12, что позволит получить cons равный соответственно 180 , 9О , 45 и т. д. Таким образом, если постоянный (вынужденный) фазовый сдвиг между соседними каналами записей известен, то нетрудно определить +дФ K,J для кажцо(о сейсмоприемника.
Точность определяемых параметров зависит от скорости протяжки носителя записи. При визуальном определении допустимая погрешность ±. 2-3% , при камеральной обработке данных разброс можно уменшить до 1-2%. Повышение точности достигается в результате применения одного стабильного источника возбуждения для всех преобразователей, находящихся в одинаковых условиях.
Устройство позволяет определить параметры различных типов сейсмоприемников, за исключением тех, преобразователи которых заключены в ферромагнитной корпус, являющийся магнитным экраном для внешнего магнитного поля задатчика. Кроме того, устройство позволяет определить полярность магнитной системы, наличие металлических предметов на движущейся инертной массе и внутри нее, что сказывается на затухании и нарушает линейную упругость пружин, а также изменяет собственную частоту инертной массы, находящейся в различных положениях от нулевого пункта. Вес устройства не превышает 4-5 кг.
Применение устройства позволит значительно повысить производительность, определять и контролировать параметры сейсмоприемников в полевых условиях непосредственно на месте их установки, не нарушая рабочего режима и согласования с регистрирующим устройством, бесконтактным способом - дистанционно, с одновременной записью параметров на одну осциллограмм ЧТОБ свою очередь, позволяет визуально определять идентичность сейсморегистрирующих каналов сейсмостанпий. Контроль параметров сейсмоприемников непосредственно на точках наблюдений значительно повысит качество полевого сейсмического материала, в чем выражается экономическая эффективность устройства.
Формула изобретения
Устройство для определения параметров сейсмоприемников, содержащее установочную платформу, задатчик колебаний и сейсмоприемйигки, отличающееся
тем, что, с целью повышения производительности, задатчик колебаний выполнен в виде постоянного магнита, помещенного в корпус и закрепленного в немагнитной оправке с контрольной катушкой, жестко связанной с корпусом, при этом постоянный магнит расположен по центру установочной платформы с воздушным зазором между платформой и корпусом.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 274407, кл. (5 О1 V 13/ОО, 1970.
2.Авторское свидетельство СССР № 411412, кл. Q 01 V 1/04, 1974.
3.Авторское свидетельство СССР № 166505, кл. С, 01 V 1/16, 1963, (прототип).


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения параметров сейсмоприемников | 1975 |
|
SU545947A1 |
| Устройство для установки низкочастотных сейсмоприемников и проверки их параметров | 1975 |
|
SU601644A1 |
| Устройство проверки идентичности сейсмоприемников | 1989 |
|
SU1651256A1 |
| УСТРОЙСТВО ДЛЯ КАЛИБРОВКИ СЕЙСМИЧЕСКИХ ДАТЧИКОВ | 2015 |
|
RU2599183C1 |
| Способ калибровки сейсмических каналов с записью на промежуточный носитель | 1989 |
|
SU1755229A1 |
| Сейсмоприемник | 1988 |
|
SU1594472A1 |
| Сейсмоприемник | 1977 |
|
SU685993A1 |
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ ПРОНИКНОВЕНИЯ ЧЕЛОВЕКА ЧЕРЕЗ КОНТУР ЗАПРЕЩЕННОЙ ЗОНЫ | 2000 |
|
RU2209467C2 |
| Электродинамический сейсмоприемник | 1984 |
|
SU1267318A1 |
| Способ преобразования сейсмических сигналов и устройство для его реализации | 1976 |
|
SU623168A1 |
7ff
Бланк
72
20
1/г.2
